地面运输系统中感应电机驱动的磁场定向控制
这个例子演示了在无轨电车牵引系统中变速交流驱动的操作。

牵引系统
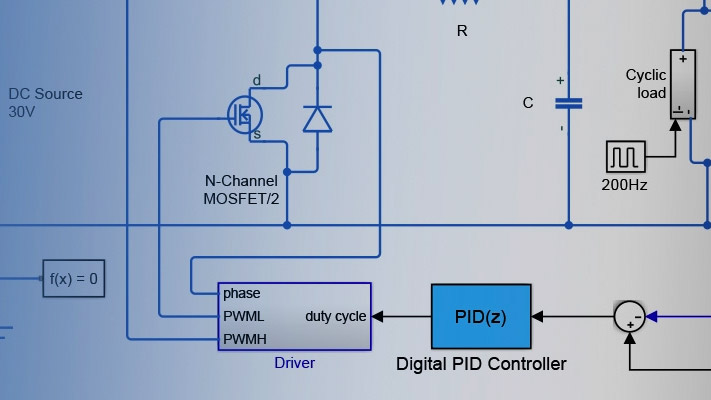
电能由15kv、单相、60hz的悬链线通过15kv / 460v变压器提供。次级变压器连接到一个脉宽调制(PWM) AC/DC全桥变换器,在直流链路上产生750v的直流电压。这个电压由一个调谐到二次谐波(120赫兹)的滤波器过滤。直流链路电压连接到一个pwm控制的三相两电平变换器上。这个转换器产生感应电动机变速运行所需的可变电压和频率。AC/DC变换器允许在制动期间倒转功率流。然后,公交车的动能被转换成电能并注入电力系统。此外,该变换器还可以实现单位功率因数运算。
根据应用、期望的性能和控制器设计的复杂性,可以使用各种方案来控制逆变器馈电的感应电机驱动。常用的控制方案有标量控制(V/Hz控制或开环磁链控制)或矢量控制(磁场定向控制或直接转矩控制)。在这些方案中,电机速度是通过改变电源频率来控制的。为了在没有磁饱和的情况下获得最佳转矩,必须保持接近标称值的恒定气隙磁通,使电压保持与频率成正比。在我们的例子中,我们使用一个面向场的控制(FOC)方案。
磁场定向控制理论
FOC是一种异步电机控制方案,该控制方案利用锁定在电机磁链空间向量上的d-q坐标参考系来实现电机磁链与转矩的解耦。因此,它们可以分别由定子的直轴电流和正交轴电流控制。
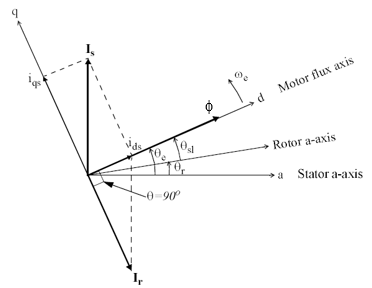
考虑图中显示的定子和转子磁动势(MMFs)的简化图 和
和 在一个给定的时刻。
在一个给定的时刻。

定子和转子三相绕组用两个单匝等效绕组表示。mmf和以由电源频率决定的同步速度旋转。由此产生的MMF 的向量和和)产生如图所示以同步速度旋转的电机磁链。
的向量和和)产生如图所示以同步速度旋转的电机磁链。
电机产生的转矩为:

在哪里为转子MMF, 为电机流量,
为电机流量, 是夹角和,
是夹角和, 是一个常数,取决于电机的结构。该关系式表明,当等于90度。FOC控制方案的挑战是保持这个角度尽可能接近90度,并保持电机磁通在其标称值(除磁场减弱运行期间)。
是一个常数,取决于电机的结构。该关系式表明,当等于90度。FOC控制方案的挑战是保持这个角度尽可能接近90度,并保持电机磁通在其标称值(除磁场减弱运行期间)。
下图显示了FOC原理。当前空间向量 和
和 代表mmf和在前面的图中。注意转子电流的空间矢量垂直于产生电机磁通的励磁电流ids。
代表mmf和在前面的图中。注意转子电流的空间矢量垂直于产生电机磁通的励磁电流ids。
参考坐标是正确的。定子直轴电流ids与电机磁通和定子交轴电流对齐 垂直于电机流量。因此,电机的磁通和转矩可以分别由定子电流分量控制
垂直于电机流量。因此,电机的磁通和转矩可以分别由定子电流分量控制 和,分别。
和,分别。
通量图中所示为定子和转子电流空间矢量在气隙中产生的总磁通 .在FOC理论中,转子磁链
.在FOC理论中,转子磁链 是用来代替气隙通量的吗.转子磁通气隙通量是否非常接近.唯一的区别就是包括一个小通量,
是用来代替气隙通量的吗.转子磁通气隙通量是否非常接近.唯一的区别就是包括一个小通量, .为转子漏电感。,以保持与旋转框架的d轴对齐,以便
.为转子漏电感。,以保持与旋转框架的d轴对齐,以便 和
和 .
.
电机磁通位置 是否需要转换坐标,并由转子转速产生
是否需要转换坐标,并由转子转速产生 和滑动频率
和滑动频率 .
.

在哪里 是极点对的数目。滑移频率的计算和参考电流
是极点对的数目。滑移频率的计算和参考电流 和
和 要求在控制器内部实现电机模型。
要求在控制器内部实现电机模型。
是由定子基准电流评估的吗电机参数 ,,
,, 如下:
如下:

在哪里为转子磁链,是互感,和 和为转子漏电电感和电阻。转子时间常数为:
和为转子漏电电感和电阻。转子时间常数为:

转子磁链计算如下:

定子q轴参考是从转矩参考值计算的吗 以及转子磁链:
以及转子磁链:

定子d轴参考电流是从通量链接参考中获得的吗 :
:

磁场定向控制
电机的速度速度参考 是馈给速度调节器块,以产生扭矩参考
是馈给速度调节器块,以产生扭矩参考 .速度调节器的作用是在稳定状态下保持电机速度等于速度参考,同时在瞬态期间提供快速的动态响应。
.速度调节器的作用是在稳定状态下保持电机速度等于速度参考,同时在瞬态期间提供快速的动态响应。
计算和当前的参考数据被馈送到当前的调节器。稳压器处理被测电流和参考电流以产生三相参考信号, .的信号连接到PWM调制器,该调制器向电机逆变器产生脉冲。该调制器采用空间矢量PWM方法,具有脉冲平均和开关频率为2khz。
.的信号连接到PWM调制器,该调制器向电机逆变器产生脉冲。该调制器采用空间矢量PWM方法,具有脉冲平均和开关频率为2khz。
整流控制器
该控制器调节直流链路电压,并保持一个统一的输入功率因数。它由以下主要块组成:
锁相环和测量系统与变压器的二次电压同步。测量二次电压和电流并转换为d-q坐标。
电流调节器(内控环)由两个PI控制器用于Id和Iq电流。控制器的输出是Vd和Vq信号,它们被转换为PWM发生器的参考信号Vref。智商参考保持为零,以实现单位功率因数。Id参考由外部电压控制回路提供。
电压调节器(外部控制回路),用于调节直流链路电压。
参考信号Vref连接到PWM发生器,产生脉冲到全桥AC/DC整流器。该发生器采用基于载波的PWM方法,脉冲平均,开关频率为2340 (39*60)Hz。
模拟
运行模拟并观察Scope块上的波形。为了模拟路面坡度的突然变化,在3.5秒时,负载扭矩从400 N.m降至40 N.m,速度参考从1000 rpm降至750 rpm。因为无轨电车是下山的,动能被感应电动机转化为电能,然后感应电动机就像发电机一样运转。这些能量通过直流链路和单相变换器返回到电网,然后作为逆变器运行。注意在Scope块的P(kW), Q(kVar)轨迹中有功功率反转(在3.5秒左右- 25kw)。
实时仿真
如果你有Simulink金宝app real和一个Speedgoat目标,你可以实时运行这个模型。
打开“配置参数”窗口(或按“”键)Ctrl + E),点击代码生成,并设置系统目标文件来
slrealtime.tlc.连接到目标,在实时选项卡上,单击运行在目标.
然后,您的模型将在目标上自动构建、部署和执行。根据您的目标流带宽,您可能必须减少从目标实时传输到主机的信号数量。
你也可以从以下列表中选择一个网站: