步进电机拉伸特性
此示例显示如何使用制造商数据表信息和测试线程参数化和调整步进电机。该模型使用从数据表中提取的数值数据进行参数化。模拟产生了与制造商提供的拉入曲线进行比较的拉动扭矩特性。要调整步进电机模型,该示例使用测试线束,可改变驱动类型和负载参数。
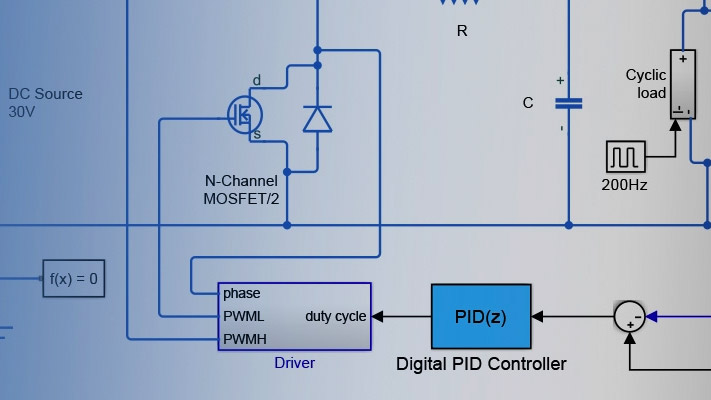
测试线束
步进器使用来自Simscape™电气™库的步进电机块进行建模。步进电机驱动器由电流源和一阶滤波器建模。电动机放置在测试线束中。测试线束逐渐增加负载直至每个阶梯率要求发生的滑移。滑动检测在滑动检测子系统中实现。子系统包含一个Simulink®断言块,用于确定预金宝app期和实际转子角之间的差异。

拉伸扭矩特性
该图显示了测试线束模拟产生的拉出特性。结果叠加在制造商数据表中的拉出曲线上。实现对拉入特性的完全匹配可能是具有挑战性的,因为大多数数据表未指定测试条件。此外,某些数据表不提供建模步进电机所需的所有数值。在这种情况下,来自模拟的引入曲线用于确定产生可接受的拉出曲线匹配的代表性值。

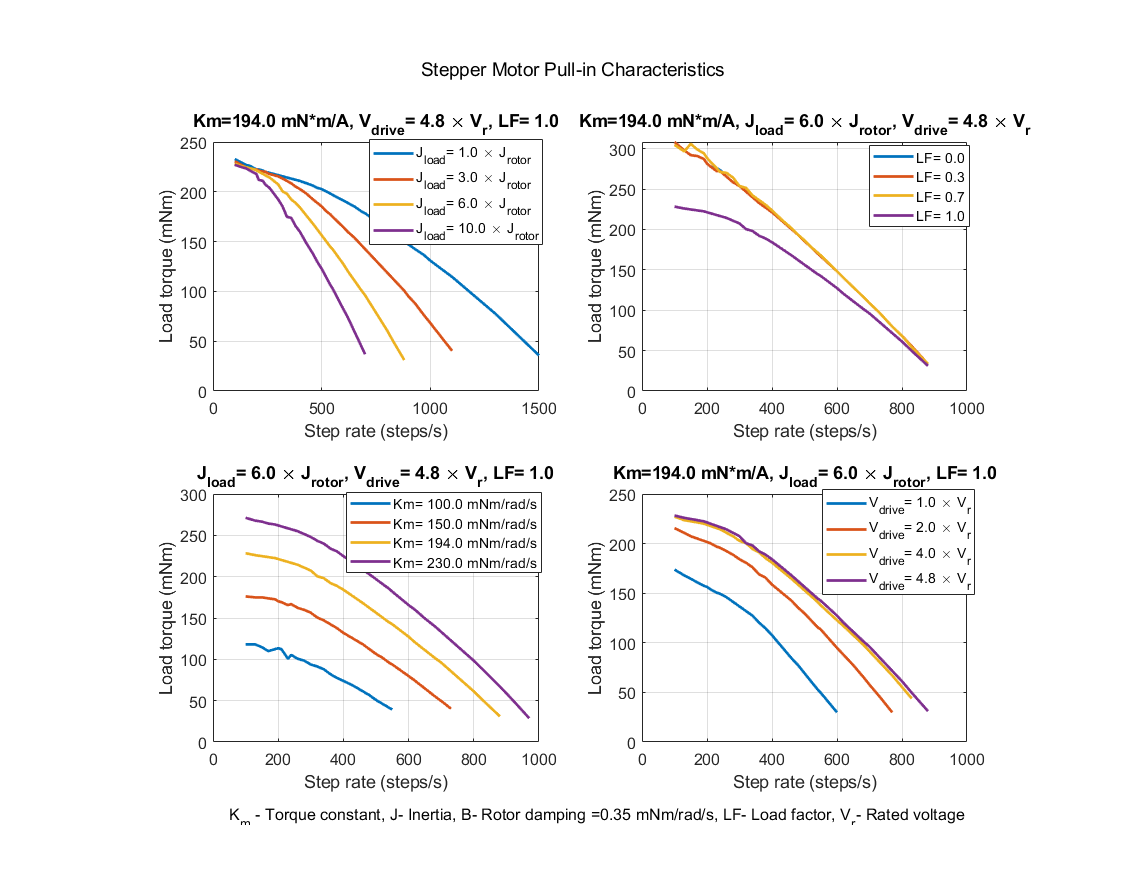
引入特性灵敏度驱动和负载参数
在拉入模式下,步进电机必须启动和停止而不会失去同步。由于步进电机的动态性质,拉伸扭矩速度性能对步进电机驱动配置和负载参数非常敏感。
在建模或调整步进电机时,请考虑:
增加负载惯性在较高的步骤速率下降低了步进电机拉动扭矩。通常,对于高级速率操作,负载惯量小于转子惯量的三倍。通常是公认的做法,以限制负载惯性以不到10倍的转子惯性。
具有较高阻尼部件的负载导致较低步骤速率的更好性能,因为阻尼有助于克服步进电机共振的影响。类似地,内部电机转子阻尼也有助于提高低步骤速率的性能。
具有低绕组电阻的步进电机通常使用恒定电流驱动器驱动。为了降低电流上升时间,将高于额定电压施加到电机。较高的电源电压在较高的步骤速率下产生更高的拉动扭矩能力。
在制造商数据表上提供的拉入扭矩曲线通常为特定的驱动器和负载配置(负载类型,负载惯量和负载阻尼)给出。制造商倾向于使用Dyno设置或通过向转子轮施加摩擦来测试步进电机。测试方法很少包括在数据表上。因此,模拟步进电机以生成参数化验证目的的曲线总是很重要。
该图表明了拉动扭矩如何对转子阻尼,驱动电压,负载惯量和负载类型敏感。
对于任何给定的步进电机,符合拉动扭矩特性的模型参数值的一组通常不是唯一的。为了确保参数化是代表性的,还有很好的做法,还可以使用数据表生成并比较拉出曲线。
您还可以从以下列表中选择一个网站: