机载SAR系统设计
这个例子展示了如何设计一个在x波段工作的合成孔径雷达(SAR)传感器,并计算传感器参数。SAR利用雷达天线在目标区域的运动来提供目标区域的图像。当雷达天线发射和接收脉冲时,合成孔径雷达平台在目标区域运行,产生一个合成孔径。
本例着重于设计满足一组性能参数的SAR传感器。它概述了将性能指标(如方位分辨率和探测概率)转换为SAR系统参数(如天线尺寸和发射功率)的步骤。它对条带图和聚光灯操作模式的设计参数进行建模。与带状地图操作相比,聚束模式可以提供更好的分辨率和更强的场景信号,但降低了场景大小或区域成像率。该实例还模拟了方位角啁啾信号的参数。
下图对各种系统和性能参数进行了分类。本示例介绍了选择系统参数以满足性能参数的功能。

设计规范
该机载SAR系统的目标是提供距离机载平台10公里的目标区域的图像,距离和方位角分辨率为1米。平台运行高度为5km,移动速度为100m /s。期望的性能指标是检测概率(Pd)和虚警概率(Pfa)。“Pd”必须大于或等于0.9。Pfa值必须小于1e-6。
slanterngres=1;所需的倾斜距离分辨率(m)azres = 1;%所需方位分辨率(m)maxrng = 10 e3;%最大无歧义倾斜范围(m)pd = 0.9;%检测概率pfa=1e-6;%误报概率v = 100;%的速度(米/秒)h = 5000;%雷达高度(m)
机载SAR系统设计
合成孔径长度、积分时间、覆盖率、条带图波束宽度以及聚光模式和信号带宽等系统参数是定义SAR系统运行能力的关键参数。这些参数确保SAR系统覆盖宽波束计算积分时间的关注区域。计算的信号带宽满足所需的距离分辨率。
信号配置
要计算SAR系统参数,首先必须知道传播信号的波长,它与系统的工作频率成反比。对于本例,将工作频率设置为10ghz,这是典型的机载SAR系统。
使用freq2wavelen函数来计算传播信号的波长。
频率=10e9;%X波段内的雷达频率(Hz)λ= freq2wavelen(频率)%波长(m)
λ=0.0300
信号带宽映射到SAR的倾斜距离分辨率,而倾斜距离分辨率是区分相隔一定距离的两个目标所需要的因素。倾斜距离分辨率给你区分两个目标所需的最小距离差。使用rangeres2bw函数来计算信号带宽,这是由倾斜距离分辨率决定的。
pulse_bw = rangeres2bw (slantrngres)%脉冲带宽(Hz)
pulse_bw = 149896229
Stripmap SAR模式
Stripmap SAR模式假设雷达天线相对于平台运动方向的固定指向方向。本例中的天线指向舷侧方向。
天线方向
俯角通常用来确定天线在仰角中的指向方向。这个例子假设地球是平的,因此俯角与掠角相同。
使用grazingang函数从视线范围计算掠射角度。
grazang=grazingang(h,maxrng,“平”)掠角%(以度数计)
grazang = 30.0000
天线方位尺寸
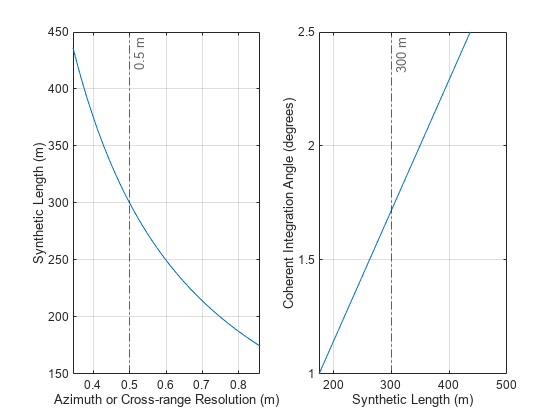
接下来,使用萨伦和sarazres用于分析和计算合成孔径长度及其方位分辨率,以选择天线方位尺寸。绘制合成长度作为交叉范围分辨率的函数。绘制天线方位角尺寸作为合成长度的函数。
Dazv = [1 1.5 2 2.5 3];天线方位角尺寸(m)striplenv=零(1,numel(dazv));stripazresv=零(1,numel(dazv));为i=1:numel(dazv)striplenv(i)=sarlen(maxrng,lambda,dazv(i));stripazresv(i)=sarazres(maxrng、lambda、striplenv(i));结束helperPlotStripmapMode(stripazresv、striplenv、dazv、azres)

从图中可以看出,条带映射模式的合成孔径长度为149.9 m,可以满足1 m的方位角分辨率要求。条带映射模式下天线方位尺寸最小为2m。减小天线方位角尺寸以获得比条带图模式更好的方位角分辨率。
条带映射模式下合成孔径长度为149.9 m,天线方位角尺寸为2m。
戴兹= 2
戴兹= 2
条纹长度=149.9
striplen = 149.9000
天线高度尺寸
接下来,根据所需的条带长度确定天线仰角尺寸。对于本例,假设所需的条带长度为2.4 km。
使用孔径2水函数分析条带长度以选择天线仰角尺寸。
rngswath = 2400;Delv = [0.15 0.2 0.25 0.3 0.35];%立面尺寸(m)rangeswathv = 0(1,元素个数(delv));为I =1:numel(delv) [rangeswathv(I),crngswath] = aperture2swath(maxrng,lambda,[delv(I) daz],grazang);结束clf图(范围HV、delv)网格在参照线(rngswath“-”。, {[num2str(圆(rngswath, 2)),“我是]});%选定范围线束包含(“片长度(m)”) ylabel (“天线仰角尺寸(m)”)
从图中可以看出,在条带长度为2400 m的情况下,天线仰角尺寸为0.25 m是合适的。
将天线仰角尺寸设置为0.25 m。
德尔= 0.25
德尔= 0.2500
实际天线波束宽度和增益
使用AP2光束宽度函数来计算真实的天线波束宽度。
realAntBeamwidth = ap2beamwidth([daz del],lambda)% [Az El] (deg)
realAntBeamwidth =2×10.8588 - 6.8707
使用aperture2gain函数来计算天线增益。
antGain=孔径2Gain(daz*del,λ)% dBi
antGain = 38.4454
合成波束宽度,处理时间和约束
接下来,使用波束宽度,sarinttime,萨马克斯柯夫酸盐,sarmaxswath用于计算合成波束宽度、积分时间、区域覆盖率和最大条带长度的函数。注意,SAR系统的方位角波束宽度远小于真实孔径雷达的方位角波束宽度。
stripsynbw = sarbeamwidth(λ,striplen);%合成波束宽度(度)stripinttime = sarinttime (v, striplen);%集成时间(s)stripcovrate = sarmaxcovrate (azres grazang);%覆盖率上限(m^2/s)stripswlen=sarmaxswath(v、azres、grazang);%线束长度上限(m)RealAntenna=[realAntBeamwidth(1);NaN;NaN;NaN];参数=[“合成波束宽度”;“集成”;“条带长度上限”;...“区域覆盖率上限”];StripmapSAR = [stripsynbw; stripinttime;轮(stripcovrate / 1 e6, 1);轮(stripswlen / 1 e3)];单位= [“度”;“s”;“公里^ 2 / s”;“公里”];sarparams =表(参数、RealAntenna StripmapSAR、单位)
萨帕拉姆斯=4×4表参数RealAntenna StripmapSAR单位 ___________________________________ ___________ ___________ _________ " 合成波束宽度0.85884 - 0.0057294“度”“积分时间“南1.499”s”“上限片长度南173.1公里^ 2 / s”“上限区域覆盖率”南1731公里
在这种情况下,使用SAR的最大方位分辨率是1米。然而,要实现这种性能,脉冲需要集成超过1.5 s。区域覆盖率上限为173 /s、 最大线束长度的上限为1731 km。
Spotlight SAR模式
聚束SAR能够将SAR成像能力显著扩展到高分辨率成像。这是可能的,因为聚光灯模式确保雷达天线在被成像区域周围瞬间斜视,从而与条带贴图模式相比,照亮目标区域的持续时间更长。
连贯的整合角度
在本例中,条带模式的方位角分辨率为1米。聚束模式的分辨率通常表示为平台穿过合成孔径长度时雷达瞄准矢量的相干积分角。
使用sarintang和萨伦用于计算相干积分角和合成孔径长度的函数。
恰恩=萨林堂(兰姆达,蓝精灵)%(学位)
ciang = 0.8589
len=sarlen(最大值,“CoherentIntegrationAngle”ciang)%(m)
len = 149.8976
当天线方位角尺寸为2 m时,带状图模式的最佳方位角分辨率为1 m。使用相同的天线方位角尺寸2 m,在聚束模式下获得更好的方位角分辨率0.5 m。在聚束模式下,引导雷达波束使目标保持在较长时间内,从而形成较长的合成孔径。
接下来,使用萨伦和sarazres函数分析在不同相干积分角下的合成孔径长度及其方位角分辨率。
spotazres = 0.5;聚束SAR方位角分辨率(m)intangv = 1:0.01:2.5;相干积分角(度)spotlenv = 0(1,元素个数(intangv));spotazresv = 0(1,元素个数(intangv));为I =1:numel(intangv) spotlenv(I) = sarlen(maxrng,“CoherentIntegrationAngle”intangv(我));spotazresv (i) = sarazres(λ,maxrng spotlenv(我));结束helperPlotSpotlightMode (spotazresv spotlenv、intangv spotazres)
该图表明,在聚束式SAR模式中,聚束式SAR模式的合成孔径长度为300 m,对应于0.5 m的方位分辨率。对于1.71度的相干积分角,聚束式SAR模式的方位分辨率为0.5 m。需要注意的是,减小天线方位尺寸以获得类似的az条纹贴图模式下的imuth分辨率。
对于聚光灯模式,将合成孔径长度设置为300 m,将相干积分角设置为1.71度。
spotlen=300
spotlen=300
intang = 1.71
intang = 1.7100
合成波束宽度、处理时间和约束
与带状地图模式相比,聚束模式可以提供更好的分辨率和更强的场景信号,但降低了场景大小或区域成像率。
使用波束宽度,sarinttime,萨马克斯柯夫酸盐,sarmaxswath用于计算合成波束宽度、积分时间、区域覆盖率和最大条带长度的函数。注意,聚束SAR系统的面积覆盖率和最大条带长度要比条带模式小得多。
spotsynbw = sarbeamwidth(λ,spotlen);%合成波束宽度(度)spotinttime = sarinttime (v, spotlen);%集成时间(s)spotcovrate = sarmaxcovrate (spotazres grazang);%覆盖率上限(m^2/s)spotswlen = sarmaxswath (v, spotazres grazang);%线束长度上限(m)SpotlightSAR = [spotsynbw; spotinttime;轮(spotcovrate / 1 e6, 1);轮(spotswlen / 1 e3)];sar =表(参数、StripmapSAR SpotlightSAR、单位)
sar =4×4表参数StripmapSAR SpotlightSAR单位 ___________________________________ ___________ ____________ _________ " 合成波束宽度0.0057294 - 0.0028628“度”“积分时间1.499 - 3“年代”“上限^ 2片长度“173.1 - 86.5公里/秒”“上限区域覆盖率1731 865公里”
方位角啁啾信号参数
确定方位角啁啾信号参数,即方位角啁啾率、多普勒带宽、波束压缩比和解调后的方位角带宽。你可以得到方位-时间-带宽乘积。这些对设计精确的方位合成孔径加工机构具有重要意义。
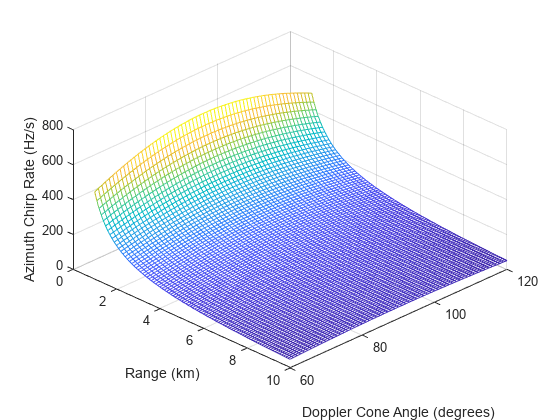
使用sarchirprate函数来计算方位角啁啾率,这是方位信号在传感器照亮散射体时频率变化的速率。
azchirp = sarchirprate (maxrngλ,v);% (Hz / s)
分析方位啁啾率对距离和多普勒锥角变化的敏感性。图中显示,增加雷达的无模糊距离会降低方位啁啾率。
dcang = 60:1:120;%多普勒锥角(以度数计)rngv = 1 e3:100: maxrng;azchirpv = 0(长度(dcang), (rngv));为i=1:长度(dcang)v(i,:)=sarchirprate(rngv,lambda,v,dcang(i));结束clf网(rngv / 1 e3, dcang azchirpv)包含(的距离(公里)) ylabel (“多普勒锥角(度)”) zlabel (“方位啁啾率(Hz/s)”)视图(45 [45]);
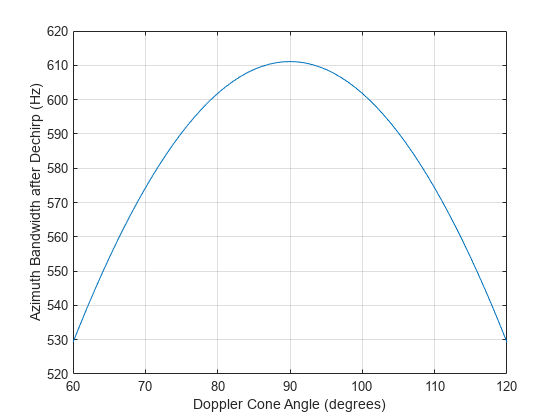
使用sarscenedopbw函数用于计算方位解密后的场景带宽。假设场景大小为916米。
佤邦= 916;bwdechirp = sarscenedopbw (maxrng,λ,v, Wa);%(赫兹)
分析场景带宽对多普勒锥角变化的敏感性。
bwdechirpv=零(长度(dcang),1);为i = 1:length(dang) bwdechirpv(i,:) = sarscenedopbw(maxrng,lambda,v,Wa, dang (i));结束clf图(dcang、bwdechirpv)网格在包含(“多普勒锥角(度)”) ylabel (“解调后的方位角带宽(Hz)”)

接下来,使用sarpointdopbw和sarbeamcompratio函数来计算点散射体接收信号的多普勒带宽和波束压缩比。注意,聚束SAR模式的多普勒带宽和波束压缩比比条带SAR模式要大得多。
% Stripmap SAR模式stripbwchirp = sarpointdopbw (v, azres);%(赫兹)striptbwaz = bwdechirp * stripinttime;%无单位stripbcr = sarbeamcompratio (maxrng,λ,striplen Wa);%无单位聚焦SAR模式spotbwchirp = sarpointdopbw (v, spotazres);%(赫兹)spottbwaz = bwdechirp * spotinttime;%无单位spotbcr = sarbeamcompratio (maxrng,λ,spotlen Wa);%无单位参数=[点散射体的多普勒带宽;“方位时间带宽产品”;...“梁压缩比”;“方位啁啾率”;解码器后的方位角带宽];StripmapSAR = [stripbwchirp; striptbwaz; stripbcr;轮(azchirp); bwdechirp);SpotlightSAR = [spotbwchirp;轮(spottbwaz);轮(spotbcr);轮(azchirp); bwdechirp);单位= [“赫兹”;“无单位”;“无单位”;“赫兹/ s”;“赫兹”]; r=表格(参数、StripmapSAR、SpotlightSAR、单位)
r =5×4表参数StripmapSAR SpotlightSAR单位________________________________________ _________________________________“来自点散射体的多普勒带宽”100 200“Hz”“方位时间带宽积”916.02 1833“无单位”“波束压缩比”916.02 1833“无单位”“方位啁啾率”67 67“Hz/s”“解码后的方位带宽”611.09 - 611.09“赫兹”
合成孔径雷达功率计算
使用stripmap SAR模式雷达方程的功率形式估计必须传输的峰值功率。所需的峰值功率取决于许多因素,包括最大无歧义范围、接收机所需的信噪比以及波形的脉冲宽度。在这些因素中,接收机所需的信噪比取决于Pd和Pfa的设计目标。为雷达系统及其环境建模和估计目标RCS、PRF以及不同的增益和损耗源。
接收信噪比
首先,计算接收机所需的信噪比。Pd、Pfa和信噪比之间的关系可以用ROC曲线来表示。
Snr_db = [-inf, 0, 3, 10, 13];rocsnr (snr_db);

ROC曲线表明,要满足Pfa = 1e-6和Pd = 0.9的设计目标,接收信号的信噪比必须超过13 dB。您可以通过查看图来猜测信噪比的值,但只计算所需的值更简单。使用albersheim函数,推导所需的信噪比。
snr_min=阿尔伯斯海姆(pd,pfa)
snr_min = 13.1145
目标RCS
使用landreflectivity函数来计算反射率,反射率是给定掠射角度和工作频率下的归一化雷达横截面(NRCS)。然后利用该方法计算目标在地面图像平面上的RCS萨克斯功能和考虑雷达分辨率。
landType =“顺利”;nrc = landreflectivity (landType grazang频率);%计算无植被平滑土地的归一化RCStgtrcs = sarSurfaceRCS(nrcs,[slantrngres azres],grazang);
PRF上下界
使用sarprfbounds函数用于确定给定雷达速度和掠射角的距离测绘带和方位分辨率的最小和最大PRF值。
[prfminv,prfmax]=沙普边界(v,azres,rngswath,grazang)
prfminv = 100
prfmax = 6.7268 e + 04
PRF选择
PRF通常可编程,并可针对每个应用进行优化。使用sarprf函数,用于根据雷达速度和沿方位角的实际天线尺寸计算雷达的PRF。指定一个恒定的滚降系数作为安全裕度,以防止主瓣回波在PRF间隔中出现混叠。如果PRF设置过低,雷达会受到光栅波瓣和多普勒模糊的影响。如果PRF设置过高,则范围测量值将不明确。
脉冲重复频率= sarprf (v,戴兹,的滚边, 1.5)
prf=150
选定的PRF在PRF范围内。
处理收益
使用matchinggain函数用于计算匹配滤波器后由于噪声带宽降低而产生的距离处理增益。
d = 0.05;占空比% 5pw =(1 /脉冲重复频率)* d;%有效脉冲宽度(s)pulse_bw rnggain = matchinggain (pw)范围处理增益(dB)
rnggain = 46.9867
使用sarazgain函数用于计算由于脉冲相干积分而产生的方位角处理增益。
azgain = sarazgain (azres maxrngλ,v,脉冲重复频率);% Az处理增益(dB)
损耗和噪声系数
使用noisefigure函数用来估计级联接收机级的噪声系数。假设有以下七个阶段:
第1阶段LNA:噪声系数= 1.0 dB,增益= 15.0
第二阶段RF滤波器:噪声系数= 0.5 dB,增益= -0.5
第三阶段混频器:噪声系数= 5.0 dB,增益= -7.0
第四阶段中频滤波器:噪声系数= 1.0 dB,增益= -1.0
第5级中频前置放大器:噪声系数=0.6 dB,增益=15.0
第6级IF级:噪声系数= 1.0 dB,增益= 20.0
第7级相位检测器:噪声系数=6.0 dB,增益=-5.0
Nf = [1.0, 0.5, 5.0, 1.0, 0.6, 1.0, 6.0];% dBg=[15.0,-0.5,-7.0,-1.0,15.0,20.0,-5.0];% dBcnf=噪声图(nf,g)
cnf=1.5252
使用radarpropfactor函数用于计算平坦地面上的单向雷达传播因子。
[hgtsd,beta0,vegType]=土地粗糙度(“顺利”);tgtheight = hgtsd;Re = effearthradius (maxrng h, tgtheight);propf = radarpropfactor (maxrng、频率、h、tgtheight“EffectiveEarthradius”再保险,“TiltAngle”grazang,...“提升波束宽度”realAntBeamwidth (2)“SurfaceHeightStandardDeviation”hgtsd,“SurfaceSlope”beta0,...“植被类型”vegType)
propf = -0.0042
使用tropopl函数计算由于大气气体吸收的损失。
atmoLoss = tropopl (maxrng频率、tgtheight grazang)
atmoLoss=0.0733
传输能量
使用radareqsarpow函数,利用SAR雷达方程计算峰值功率。还可以指定其他损耗和因素,包括方位波束形状损耗、窗口损耗、传输损耗和接收线损。用。估计光束形状损失beamloss函数,并对所有其他固定损耗组合使用5 dB。对于此分析,请指定landType为“光滑的“利用最弱的地面目标。有限的数据采集时间限制了采集的总能量,雷达信号处理通过两个主要增益因子提高了SAR图像的信噪比。第一个是由于脉冲压缩,第二个是由于脉冲相干积分。
Imgsnr = snr_min + rnggain + azgain;% (dB)磅= beamloss;customLoss = 5;% dBsntemp=systemp(cnf);%噪声温度Pt = radareqsarpow (maxrng,λ,imgsnr pw, rnggain azgain,“获得”antGain,“RCS”tgtrcs,...“AtmosphericLoss”,atmoLoss,“损失”,cnf,“传播因子”propf,...“Ts”,sntemp,“CustomFactor”-Lb-customLoss)
Pt=535.1030
总结
这个例子显示了设计x波段SAR系统必须计算的方面,可以在带状地图和聚光模式下工作。该实例表明,同样的SAR系统可以在条带地图和聚束模式下工作,并可以在牺牲其他参数的情况下,根据需求实现不同级别的分辨率。首先,分析和选择天线尺寸,以满足要求的分辨率。金宝搏官方网站然后估计天线增益、处理时间、约束条件和方位角啁啾信号参数。然后估计所需的信噪比、目标RCS、PRF以及雷达及其环境下的处理增益和损失。最后,使用SAR方程计算峰值发射功率。
参数=[“天线方位尺寸”;“天线标高尺寸”;“合成孔径长度”;...“方位分辨率”;“合成波束宽度”;“集成”;“条带长度上限”;...“区域覆盖率上限”;“连贯的整合角度”;点散射体的多普勒带宽;...“方位时间带宽产品”;“梁压缩比”;“方位啁啾率”;解码器后的方位角带宽];Stripmap =[戴兹;德尔;striplen azres; stripsynbw; stripinttime;轮(stripcovrate / 1 e6, 1);轮(stripswlen / 1 e3);...南;条纹啁啾;striptbwaz;stripbcr;圆形(无啁啾);bwdechirp];聚光灯=[daz;del;spotlen;spotazres;spotsynbw;spotinttime;圆形(SPOTCOVERATE/1e6,1);圆形(spotswlen/1e3);...intang; spotbwchirp;轮(spottbwaz);轮(spotbcr);轮(azchirp); bwdechirp];单位= [“m”;“m”;“m”;“m”;“度”;“s”;“公里^ 2 / s”;“公里”;“度”;“赫兹”;“无单位”;...“无单位”;“赫兹/ s”;“赫兹”];T =表(参数、Stripmap聚光灯,单位)
T=14×4表参数Stripmap Spotlight Units ________________________________________ ____________________________“天线方位角尺寸”2 2“m”“天线仰角尺寸”0.25 0.25“m”“合成孔径长度”149.9 300“m”“方位角分辨率”1 0.5“m”“合成波束宽度”0.0057294 0.0028628“度”“积分时间”1.499 3“s”“上限片长度173.1 - 86.5公里^ 2 / s”“上限区域覆盖率”1731 865“公里”“连贯的整合角度”南1.71“度”“点散射体的多普勒带宽”100 200 1833年“赫兹”“方位时间带宽积”916.02“无单位”“梁压缩比916.02 1833年“无单位”“方位啁啾率”67 67“Hz / s”“方位解码后带宽" 611.09 611.09 "Hz"
工具书类
Carrara, Walter G., Ronald M. Majewski和Ron S. Goodman。聚光合成孔径雷达:信号处理算法。波士顿:Artech House, 1995年。
金宝app支持功能
helperPlotStripmapMode
函数helperPlotStripmapMode(stripazresv、striplenv、dazv、azres)绘制方位角分辨率与合成孔径长度次要情节(1、2、1)情节(stripazresv striplenv)网格在参照线(azres“-”。, {[num2str(圆(azres)),“我是]});%选定方位分辨率包含(“方位或横向分辨率(m)”) ylabel (“合成长度(米)) stripidx = find(abs(striplenv-150)<1);%要求的方位角分辨率对应的指数绘制合成孔径长度与天线方位角尺寸子地块(1,2,2)绘图(striplenv,dazv)网格在xline(striplenv(stripidx),“-”。, {[num2str(圆(striplenv (stripidx), 2)),“我是]});所选合成长度包含(“合成长度(米)) ylabel (“天线方位角尺寸(m)”)结束
helperPlotSpotlightMode
函数helperPlotSpotlightMode (spotazresv spotlenv、intangv spotazres)绘制方位角分辨率与合成孔径长度次要情节(1、2、1)情节(spotazresv spotlenv)网格在参照线(0.5,“-”。, {[num2str(圆(spotazres, 2)),“我是]});%选定方位分辨率包含(“方位或横向分辨率(m)”) ylabel (“合成长度(米)) spotidx = find(abs(spotlenv-300)<1);%对应于0.5m方位分辨率的索引绘制合成孔径长度与相干积分角次要情节(1、2、2)情节(spotlenv intangv)网格在参照线(spotlenv (spotidx),“-”。, {[num2str(圆(spotlenv (spotidx))),“我是]});所选合成长度包含(“合成长度(米)) ylabel (“相干积分角(度)”)结束
你也可以从以下列表中选择一个网站: