雷达链路预算分析
这个例子展示了如何使用雷达设计师应用程序进行雷达链路预算分析,并设计一套基于性能要求的雷达系统。雷达设计师允许用户从五种预设雷达类型中的一种开始设计新的雷达系统,设置性能要求,计算雷达指标,配置环境,并比较几种备选设计。您也可以导出设计作为MATLAB®脚本进一步分析。
介绍
雷达距离方程是将雷达系统的主要参数联系在一起的有力工具。它可以让雷达工程师很好地了解系统的性能,而无需诉诸复杂的分析和仿真。雷达方程在设计的早期阶段特别有用,因为关于各种组件的特定信息(例如,发射波形、天线阵列的大小或形状、信号处理算法,等等)可能还不能得到。虽然雷达方程只提供了近似结果,但考虑到雷达系统部件和信号传播介质所引入的损耗,可以显著提高分析的保真度。的雷达设计师App是雷达方程分析的工具,也称为雷达链路预算分析。它为用户提供了雷达系统、目标和环境的许多可调参数,并提供了一组可视化信息,以帮助用户选择这些参数。的雷达设计师应用程序还允许设计一个雷达系统基于一套性能要求。
这个例子展示了如何使用雷达设计师应用程序设计一个x波段监视雷达,用于探测小目标。设计依据如下要求规范:
峰值发射功率不应超过2000w
雷达应该提供360度方位覆盖和60度仰角覆盖
雷达应探测1米雷达截面的小型载人飞行器 海拔从300米到18公里不等
该雷达应探测到截面为0.03 m的小型无人飞机(UAS) 海拔从300米到8公里不等
检测概率为0.9,虚警概率为1e-6
雷达应该分辨两个方位和仰角相同的目标,在距离上相隔30米
雷达的距离、方位和仰角精度应分别为2米、0.2度和0.5度
雷达应该探测速度高达180公里/小时的目标
雷达应该在大雨(16毫米/小时)条件下保持其准确性和探测性能
新会话
的雷达设计师应用程序可以通过使用命令启动:
radarDesigner
默认情况下,该应用程序允许用户开始新的或使用的工具条相应的按钮打开现有会话。一个新的会话提供了五个预定义的雷达类型中的一种的选择:空中,机场,汽车,跟踪,和天气。在这个例子中,我们使用默认的机场雷达为起点。
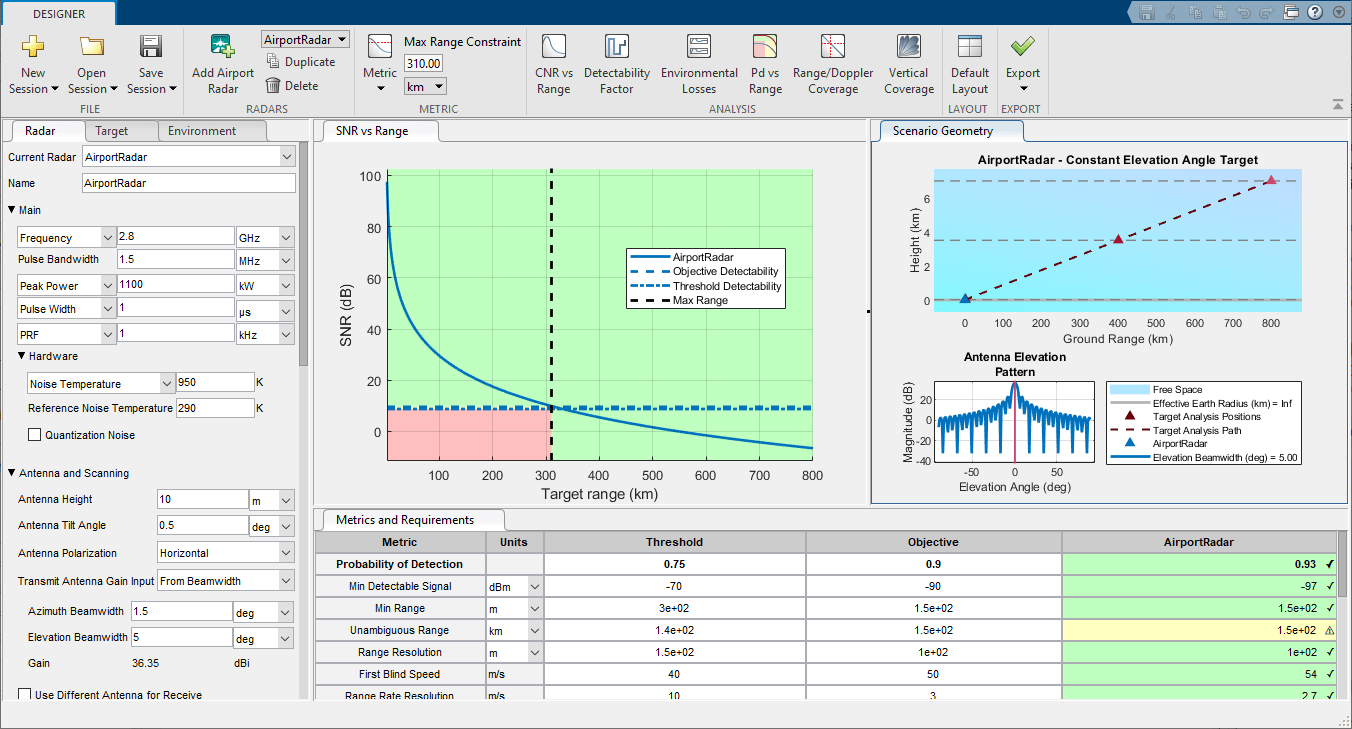
一旦一个新的会话被加载,雷达设计师应用程序向用户呈现以下文档组:
雷达,目标和环境面板在左边
信噪比与范围和场景几何图在中间和右边
指标和需求表在底部
作为开启一个新会话后的第一步,我们在顶部更改当前设计的名称雷达面板新设计.
指标和要求
在这个例子中,我们有一个详细说明最终系统性能的规范。然而,它并没有指定实现所需性能级别所需的所有设计参数。大多数设计参数必须从规范中给出的要求中得到。的雷达设计师App提供了一种从性能要求中导出雷达设计参数的方法。
性能指标和相应的需求包含在指标和要求表格对于每个性能指标,应用程序都有两个需求值:
临界点—描述该指标的最低性能级别客观的-定义指标的价值,使新系统完全满足任务需求
之间的值临界点和客观的构成可由雷达工程师可以用来平衡多个,有时甚至是冲突,性能要求的贸易空间。
计算的度量,显示在指标和要求表,可通过的最大范围或检测的概率被约束。该变量的使用作为约束通过做出的选择公制按钮公制工具条的一部分。选择最大范围作为约束意味着性能指标显示在指标和要求表在指定的最大范围内计算。选择检测概率作为约束意味着假设检测概率的指定值来计算显示的度量。在这个例子中,我们感兴趣的是两个射程:1)载人飞机18公里,2)无人机8公里。我们从有人驾驶的飞机开始,设置公制在工具条的最大射程限制为18公里。


作为下一步,我们填充临界点和客观的的值公制和要求表中给出了规格的数字。在本例中,规范仅为每个性能指标提供一个值。使用该值来设置客观的要求。然后我们设置相应的临界点接近于一个合理的值客观的.尽管期望的系统性能是由客观的的要求,该系统被认为具有当可接受的性能临界点要求是满足。创建用于选择设计参数的交易空间需要这种灵活性,否则可能很难或不可能选择设计参数。由于规范没有为表中所示的所有指标提供需求,我们将这些指标的需求设置为默认值。

目标参数
目标参数在目标面板。由于我们首先考虑的小有人驾驶的航空器中,我们设置目标的雷达横截面至1μm
.转向模型改为Swerling 1以模拟更真实的波动目标。

雷达参数
之后的要求和目标参数已经确定,我们就可以开始调整雷达的设计参数,使得计算的度量满足规定的要求。雷达设计的应用程序提供了一个方便的方法来监视所计算的度量标准的状态而改变所述设计参数的值。的条目指标和要求表是彩色编码以指示所计算的度量的状态。符合指标对应的客观的需求用绿色表示,度量值介于临界点和客观的为黄色,且指标不满足临界点要求用红色标注。同样的颜色也用于信噪比与量程和Pd与量程图,以显示满足检测要求的量程。
保证1 m
在18 km的期望距离检测到RCS目标时,通过调整雷达设计参数,使信噪比与距离图中的信噪比曲线位于目标可探测性线最大范围内.


雷达设计参数分为四个部分。每一节作如下调整:
主要.雷达工作频率和峰值功率设置为规范中给出的值。调整脉冲带宽以满足距离分辨率要求,设置脉冲宽度以在最大距离达到足够高的可用信噪比。选择7 kHz PRF值是为了在21.4 km的无模糊范围和最大无模糊速度198 km/h(第一个盲速度396 km/h)之间找到一个折衷。距离/多普勒覆盖图,通过距离/多普勒报道按钮分析工具条的一部分,用于可视化目标距离和速度之间的交换空间。

天线和扫描.天线高度、倾斜和极化保持不变。方位角和俯仰天线波束宽度分别设置为2度和6度,以满足方位角和俯仰精度要求。的扫描模式被设置为机械的以促进在方位角360度的覆盖,并且在本说明书中给出的扫描扇区仰角维度被设定为60度。天线和扫描部分还示出了搜索量的大小为5.441球面度,它需要扫描该体积的时间6.38秒。在分析中包括扫描增加了波束形状损失和射束驻留因子的链路预算。

检测和跟踪.虚警概率设置为所需值1e-6。通过选择相干积分脉冲的个数,使其具有良好的一致性目标可探测性在最大射程限制为18公里的情况下,当期望的探测概率和虚警概率分别为0.9和1e-6时,探测一个Swerling 1案例目标所需的信噪比低于可用的信噪比。

损耗因素.为了解释由于脉冲蚀损造成的损失,我们将统计蚀损添加到链路预算分析中。
经过这些调整后公制和要求表表明,本设计满足RCS为1 m的小型载人飞行器的设计要求
或更大。从信噪比与距离图中,我们可以看到,可探测系数需要实现客观的检测概率为0.9时约为10 dB,而可检测系数为临界点0.75的需求接近5 dB。由于可用信噪比曲线在目标可探测性线路在18公里处,由此产生的被探测概率高于要求客观的值和等于0.92。的指标和要求表中还显示的是所要求的最小可检测信号以检测1米
目标的探测概率为-92 dBm。
环境参数
直到现在这个例子假定自由空间传播没有任何大气衰减。为了使分析更精确,由于传播和大气衰减损失可以被包括并通过参数化环境面板。
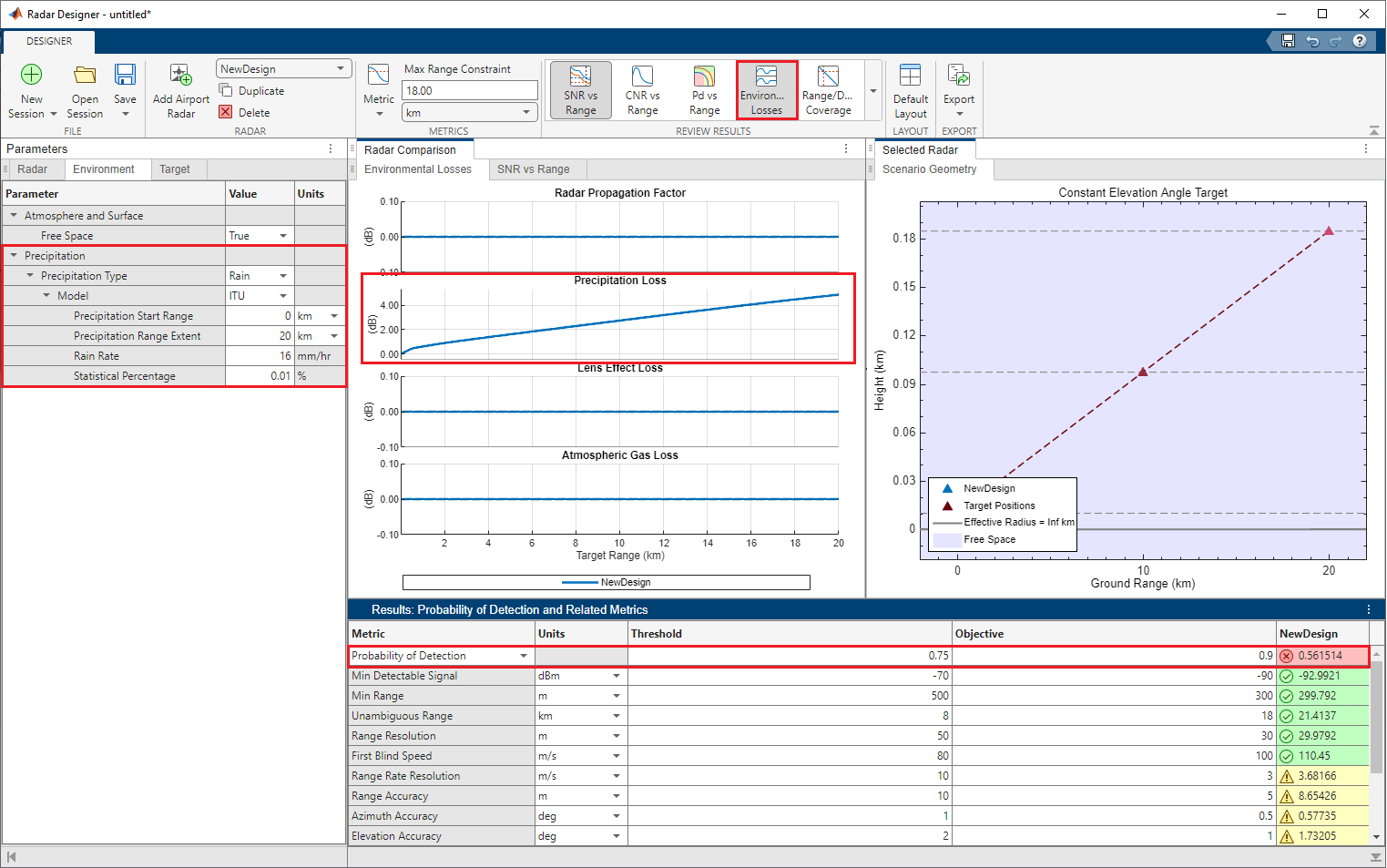
规范中规定,设计中的雷达必须在大雨(16毫米/小时)中保持所需的探测性能和测量精度。为了在分析中包含由降水引起的路径损失,我们设置降水类型来雨在降水部分的环境面板。然后,我们选择国际电联模型,并设置降水范围,使所有感兴趣的范围都出现16毫米/小时的降雨。现在,指标和要求表和信噪比与距离图表明,在最大距离的探测概率远远低于要求的0.9。

 的
的环境损失图给出关于沉淀损失的整体损失预算的贡献更好的主意。它通过访问环境损失按钮。这张图显示了由于传播和大气衰减而导致的四种与距离相关的损失。的沉淀损失副图显示,16毫米/小时的降雨在18公里处造成额外的4.8 dB损失。这导致检测概率从0.92下降到0.55,低于临界点要求。因此,系统的性能在暴雨条件下变得不可接受,不符合规格。
M-of-N CPI集成
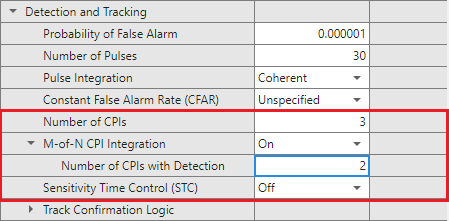
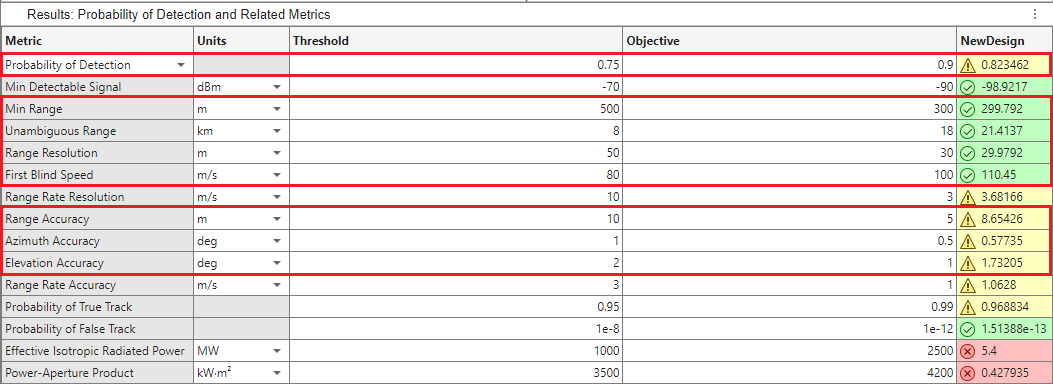
检测的概率可以通过增加可在接收机处或通过减小SNR信噪比需要作出检测(可检测性因子)而得到提高。后一种方法可能是在实践中,因为降低可探测性的因素可以通过不需要做硬件的变化信号处理技术的应用来实现更具吸引力。可探测性因子可以通过集成多个脉冲被减小。然而,目标RCS波动通常对可被相干积分脉冲的量的限制。一种可能的解决方案,同时解决了RCS波动的问题集成多个脉冲是M-的-N集成在多个相干处理间隔(的CPI)。在每个CPI脉冲被相干积分,然后M-的-N集成跨越的CPI施加。导航到雷达面板中设置cpi的数量检测和跟踪section为3,而具有2个检测的cpi的数量将导致检测概率从0.55增加到0.81。

虽然检测概率仍然低于规定客观的值,它满足临界点要求。这意味着该系统在暴雨中具有可接受的检测性能。同样地,距离、方位角和仰角精度也可以排除临界点要求,但低于各自的要求客观的值。

打开此设计雷达设计师.
radarDesigner (“SurveillanceRadarSmallTargets.mat”)
小型无人机
为了验证这种雷达的设计是否会有令人满意的表现时,目标是小型UAS,我们改变了目标RCS以上且0.03m
和度量约束设置为8公里最大范围。信噪比VS范围曲线表明,这种设计可用SNR高于目标可探测性线在8公里,检测在该范围内所得到的概率是0.94,这是远高于所需的值。该系统能够以满足检测的概率的客观要求8公里由于大气衰减的影响是在更近的范围小。

 然而,由此产生的距离和仰角精度仍然低于
然而,由此产生的距离和仰角精度仍然低于客观的和上面的临界点要求。
 .
.
出口
的雷达设计师允许将创建的设计导出为MATLAB脚本,单击出口按钮出口部分的工具条和选择导出信噪比vs范围MATLAB脚本.导出脚本包含选定的雷达,目标和环境参数,并再现信噪比VS范围曲线。它可用于进一步的实验,增强和修改设计。此外,在示出的结果指标和要求表也可以导出为单独的MATLAB脚本单击出口然后选择生成指标报告。在执行时,该脚本输出计算指标的格式化报告。


总结
这个例子展示了如何使用雷达设计师应用检测小目标进行监视雷达系统的链路预算分析。这个例子开始的规范和一组的性能要求。它显示了如何设置客观的和临界点要求基于规范中提供的值。然后介绍了如何利用信噪比距离图和信号灯颜色编码来调整雷达设计参数,使设计达到规定的要求。该示例还展示了如何更改目标参数以建模载人和无人飞机,以及如何配置环境设置以将降水造成的大气损失包含到分析中。
你也可以从以下列表中选择一个网站: