用跟踪器操作特性评估性能GydF4y2Ba
这个例子展示了如何评估:GydF4y2Ba
目标跟踪概率:有或没有虚警情况下单个目标的目标跟踪检测概率GydF4y2Ba
假跟踪概率:由于单个目标附近的假警报而导致的假跟踪概率GydF4y2Ba
本例讨论了不同的方法,以不同的保真度和计算时间执行这些计算。GydF4y2Ba
在评估跟踪器性能时,通常会计算出四种概率:GydF4y2Ba
无虚警情况下单个目标轨迹的概率(虚警概率)GydF4y2Ba )GydF4y2Ba
在没有目标的情况下,单个虚假航迹的概率(探测概率)GydF4y2Ba )GydF4y2Ba
单目标轨迹出现假警报的概率GydF4y2Ba
存在目标时单个假航迹的概率GydF4y2Ba
本例首先利用伯努利和计算了在无虚警情况下单目标轨迹的概率。然后,讨论了可用于计算所有四种概率类型的通用门史(CGH)算法,并引入了与接收机工作特性(ROC)形式相似的跟踪器工作特性(TOC)的概念。CGH算法提供了对系统容量的估计,并提供了一种评估端到端系统性能的方法。最后,通过实例介绍了CGH算法在某汽车雷达设计场景中的应用,帮助用户选择:GydF4y2Ba
所需目标信噪比GydF4y2Ba
虚假轨迹的数量GydF4y2Ba
跟踪确认阈值GydF4y2Ba
计算无虚警情况下的单目标跟踪概率GydF4y2Ba
Bernoulli Sum.GydF4y2Ba
伯努利和允许在没有假警报的情况下,在单个目标的情况下进行快速简单的性能分析。跟踪检测概率GydF4y2Ba 可以用接收机检测概率来定义吗GydF4y2Ba 对于定义为的窗口周期GydF4y2Ba
,GydF4y2Ba
在哪里GydF4y2BaTGydF4y2Ba是基本采样周期和GydF4y2BaNGydF4y2Ba表示检测机会的数量。GydF4y2Ba
用于确认阈值逻辑GydF4y2BaMGydF4y2Ba-的-GydF4y2BaNGydF4y2Ba,目标轨道概率GydF4y2Ba 被定义为GydF4y2Ba
,GydF4y2Ba
在哪里GydF4y2Ba
.GydF4y2Ba
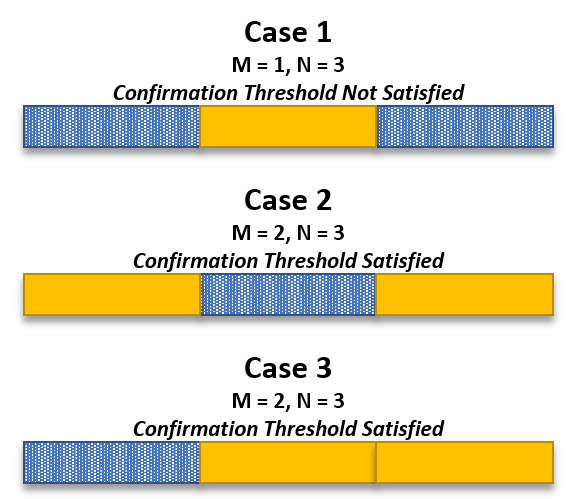
确认阈值逻辑表示为GydF4y2BaMGydF4y2Ba-的-GydF4y2BaNGydF4y2Ba或者GydF4y2BaMGydF4y2Ba/GydF4y2BaNGydF4y2Ba这是一种单级逻辑,即轨道必须与探测相关联,至少也被称为命中GydF4y2BaMGydF4y2Ba次GydF4y2BaNGydF4y2Ba连续看起来。例如,考虑一个2-of-3逻辑。在下图中,实心黄色表示命中,可以是目标或误报。图案化的蓝块代表未命中。下面代表的情况并非旨在穷举,但是图表表明2和3满足阈值,但情况1不是。GydF4y2Ba
使用Bernoulli Sum方法调查目标轨道与检测概率的概率与检测的确认阈值。假设初始化轨道需要一个命令才能执行伯努利和计算。GydF4y2Ba
定义分析的概率GydF4y2BaPd = linspace(0, 1100)。';GydF4y2Ba%定义确认阈值M/NGydF4y2Bam = 2;GydF4y2Ba%命中次数GydF4y2Ban = 3;GydF4y2Ba%观察或机会的数量GydF4y2Ba计算伯努利和,假设初始化曲目需要1次命中GydF4y2Batic pdtbernoulli = helperbernoullisum(pd,m,n);elapsedTime = toc;helperUpdate (GydF4y2Ba“伯努利”GydF4y2Ba,闪光时间);GydF4y2Ba
伯努利计算完成。总计算时间为0.0189秒。GydF4y2Ba
%绘制检测概率与目标轨道的概率GydF4y2BaPdtBernoulli hax = helperPlot (Pd,GydF4y2Ba“M / N = 2/3”GydF4y2Ba,GydF4y2Ba“P_D”GydF4y2Ba,GydF4y2Ba“P_{DT}”GydF4y2Ba,GydF4y2Ba......GydF4y2BaSprintf(GydF4y2Ba“伯努利和\n在没有假警报的情况下目标轨迹的可能性”GydF4y2Ba));GydF4y2Ba设定目标轨迹的期望概率GydF4y2BaYline(哈克斯,0.9,GydF4y2Ba“——”GydF4y2Ba,GydF4y2Ba“线宽”GydF4y2Ba2,GydF4y2Ba'显示名称'GydF4y2Ba,GydF4y2Ba“期望的P_{DT}”GydF4y2Ba);GydF4y2Ba
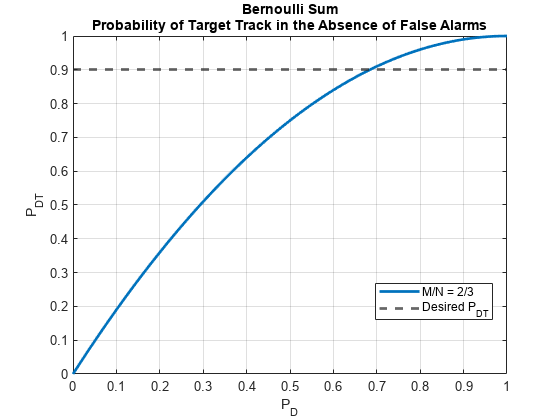
假设目标跟踪所需的概率为0.9,上图表明,大约0.7的检测概率是必要的。GydF4y2Ba
计算杂乱目标的概率GydF4y2Ba
从Bernoulli Sum计算获得的值对于快速分析非常有用,但通常不是代表实际跟踪环境,其中目标轨道受到误报的存在影响。考虑目标在存在杂乱的情况下运行的场景。GydF4y2Ba
假设假警报发生在每个单元的每个外观的基础上,跟踪门中的假警报的概率取决于门中的单元数。假设三种类型的事件:GydF4y2Ba
小姐:不检测GydF4y2Ba
命中:误报GydF4y2Ba
命中:目标检测GydF4y2Ba
门中单元的数量取决于事件的历史和事件发生的顺序。这些因素决定了跟踪器的栅极生长顺序。GydF4y2Ba
伯努利和方法假设不存在假警报,检测的顺序无关紧要。因此,当您在杂乱场景的目标中使用伯努利和时,它会产生过于乐观的结果。GydF4y2Ba
用于分析这种情况的一种方法是评估每种可能的轨道序列,并确定哪个序列满足确认阈值逻辑。这种建设马尔可夫链的蛮力方法通常是过于计算密集的。GydF4y2Ba
另一种方法是利用蒙特卡罗类型分析。蒙特卡罗模拟不是生成完整的马尔可夫链,而是手动生成GydF4y2BaNGydF4y2Ba事件。对每个序列应用确认阈值,并聚合统计信息。蒙特卡罗方法是基于大数定律的,所以性能随着迭代次数的增加而提高。蒙特卡罗分析对并行化很有帮助,但在虚警概率很小的情况下,迭代的次数可能会变得难以维持。因此,需要其他方法来快速计算轨迹概率度量。GydF4y2Ba
公共门历史算法GydF4y2Ba
通用门历史(CGH)算法大大减少了计算时间和内存需求。该算法避免了手动生成序列的需要,就像蒙特卡罗分析的情况一样,这对于低概率事件可能是昂贵的。GydF4y2Ba
该算法通过假设有三种类型的曲目来开始,可以包含:GydF4y2Ba
检测的目标GydF4y2Ba
来自目标的探测和假警报GydF4y2Ba
仅检测错误警报GydF4y2Ba
目标跟踪定义为包含至少一个目标检测并满足GydF4y2BaMGydF4y2Ba/GydF4y2BaNGydF4y2Ba确认阈值。因此,跟踪类型1和2被认为是目标轨道,而3被认为是假轨迹。GydF4y2Ba
给定前面定义的轨道类型并具有确认阈值逻辑GydF4y2BaMGydF4y2Ba/GydF4y2BaNGydF4y2Ba,则定义唯一轨道状态为GydF4y2Ba
,GydF4y2Ba
在哪里GydF4y2Ba 是自上次检测(目标或假警报)以来的时间步数,GydF4y2Ba 是自上次目标检测以来的时间步数,以及GydF4y2Ba 是检测的总计数(目标或误报)。随着算法进行,轨道状态向量根据马尔可夫链演变。GydF4y2Ba
该算法假设只有两种类型的事件可以启动轨道:GydF4y2Ba
目标探测GydF4y2Ba
假警报GydF4y2Ba
一旦一条轨道启动,以下四种类型的事件将继续一条轨道:GydF4y2Ba
没有检测GydF4y2Ba
目标探测GydF4y2Ba
假警报GydF4y2Ba
目标检测和误报GydF4y2Ba
看起来的轨道概率GydF4y2BaMGydF4y2Ba乘以事件的概率,继续看曲目GydF4y2Ba .然后通过使用公共栅极历史向量添加轨道文件的轨道概率来集中曲目。这种延伸在合理的限制范围内保持马尔可夫链中的轨道状态的数量。GydF4y2Ba
CGH算法的假设如下:GydF4y2Ba
在门口中多于一个误报的概率低,这是误报概率低的(GydF4y2Ba 或更少)GydF4y2Ba
栅极中的目标的位置具有均匀的空间分布GydF4y2Ba
使用轨道分割算法GydF4y2Ba
CGH算法可用于计算所有四种概率类型:GydF4y2Ba
在没有假警报的情况下,单一目标轨迹的概率GydF4y2Ba
在没有目标的情况下,单次假轨迹的概率GydF4y2Ba
单目标轨迹出现假警报的概率GydF4y2Ba
存在目标时单个假航迹的概率GydF4y2Ba
目标跟踪概率和假跟踪概率是跟踪器工作特性(TOC)的基础。TOC是接收机工作特性(ROC)的补充,ROC是接收机分析和性能预测中常用的指标。结合ROC和TOC提供了端到端系统分析工具。GydF4y2Ba
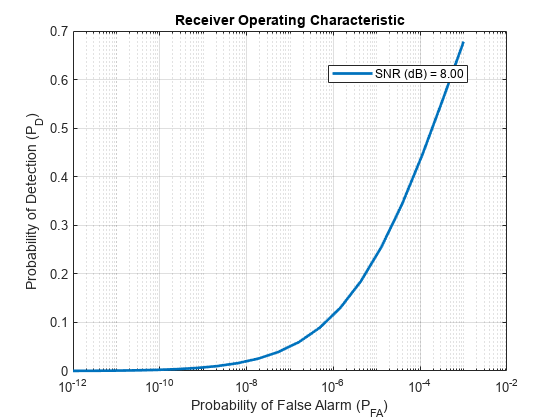
使用ROC曲线计算并绘制TOCGydF4y2BarocsnrGydF4y2Ba作为输入。假设信噪比(SNR)为8 dB。继续使用2/3确认阈值逻辑,如伯努利求和示例中所示。使用GydF4y2BatoccghGydF4y2Ba内置跟踪器。GydF4y2Ba
%接收器操作特征(ROC)GydF4y2BasnrdB = 8;GydF4y2Ba%信噪比(dB)GydF4y2Ba(Pd, Pfa) = rocsnr (snrdB,GydF4y2Ba“MaxPfa”GydF4y2Ba,1e-3,GydF4y2Ba'minpfa'GydF4y2Ba1 e-12GydF4y2Ba“NumPoints”GydF4y2Ba, 20);GydF4y2Ba%绘制ROCGydF4y2BahelperPlotLog (Pfa、Pd、snrdBGydF4y2Ba......GydF4y2Ba'误报的概率(p_ {fa})'GydF4y2Ba,GydF4y2Ba......GydF4y2Ba'检测概率(P_D)'GydF4y2Ba,GydF4y2Ba......GydF4y2Ba接受者操作特性的GydF4y2Ba);GydF4y2Ba
%计算全息算法GydF4y2BaTic [PDTCGH,PFTCGH] = TOCCGH(PD,PFA,GydF4y2Ba“确认阈值”GydF4y2Ba, (mn));elapsedTime = toc;helperUpdate (GydF4y2Ba“普通门的历史”GydF4y2Ba,闪光时间);GydF4y2Ba
公共门历史计算已完成。总计算时间为0.6383秒。GydF4y2Ba
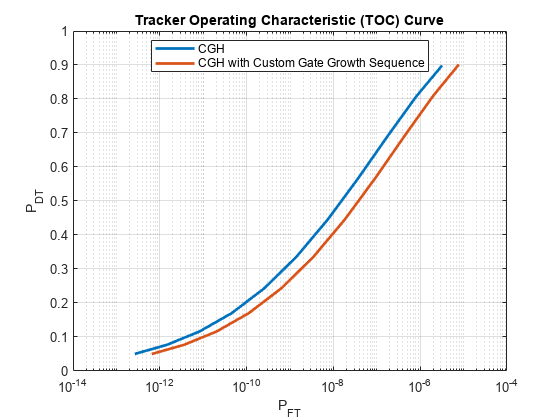
%绘制CGH结果GydF4y2BaHaxes = Helperplotlog(PFTCGH,PDTCGH,GydF4y2Ba“全息”GydF4y2Ba,GydF4y2Ba“P_{英尺}’GydF4y2Ba,GydF4y2Ba“P_{DT}”GydF4y2Ba,GydF4y2Ba......GydF4y2Ba“跟踪器工作特性(TOC)曲线”GydF4y2Ba);GydF4y2Ba
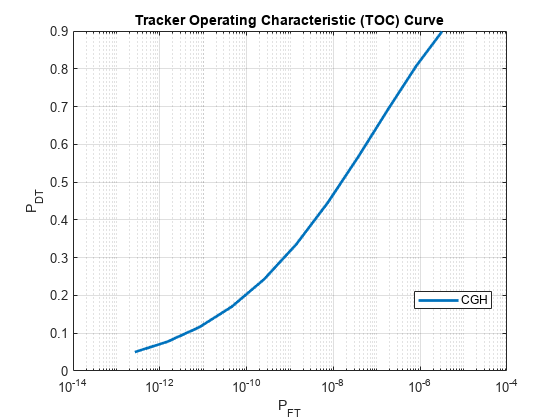
CGH算法允许评估类似于蒙特卡罗分析的跟踪器性能,但尽管有低概率事件,但是具有可接受的计算时间。因此,CGH算法允许在更加密集,详细的模拟之前进行高级调查和选择选项。GydF4y2Ba
将CGH与自定义跟踪器一起使用GydF4y2Ba
考虑一个汽车应用程序的跟踪器。定义一个自定义的,一维,几乎恒定速度(NCV)跟踪器使用GydF4y2BatrackingKFGydF4y2Ba.假设更新速率GydF4y2Ba
是1秒。假设状态转移矩阵为GydF4y2Ba
过程噪声的形式是GydF4y2Ba
,GydF4y2Ba
在哪里GydF4y2Ba 是调谐因子定义为GydF4y2Ba
.GydF4y2Ba
输入GydF4y2Ba 为预期的最大目标加速度。假设最大加速度为4m /sGydF4y2Ba 预计车辆。GydF4y2Ba
%定义状态转移矩阵GydF4y2Badt = 1;GydF4y2Ba%更新率(秒)GydF4y2BaA = [1 dt;0 1];GydF4y2Ba%定义过程噪声GydF4y2BaQ = [dt^4/4 dt^3/2;dt ^ 3/2 dt ^ 2);GydF4y2Ba%调整过程噪声GydF4y2BaAmax = 4;GydF4y2Ba%最大目标加速度(m/s^2)GydF4y2Baq = amax ^ 2 * dt;GydF4y2Ba%更新进程噪声GydF4y2Baq = q. * q;GydF4y2Ba%初始化卡尔曼滤波器GydF4y2Batrkfilt = trackingKF (GydF4y2Ba“MotionModel”GydF4y2Ba,GydF4y2Ba“自定义”GydF4y2Ba,GydF4y2Ba......GydF4y2Ba'statecovariance'GydF4y2Ba,[0 0;0 0],GydF4y2Ba......GydF4y2Ba“StateTransitionModel”GydF4y2Ba一个,GydF4y2Ba......GydF4y2Ba“ProcessNoise”GydF4y2Ba,q,GydF4y2Ba......GydF4y2Ba“MeasurementNoise”GydF4y2Ba,0,GydF4y2Ba......GydF4y2Ba“MeasurementModel”GydF4y2Ba,[1 0]);GydF4y2Ba
错误椭圆用于模拟轨道不确定性。从这种不确定性椭圆形,可以计算栅极生长序列。GydF4y2Ba

1 -GydF4y2Ba 错误椭圆的值计算为特征值的平方根GydF4y2Ba 预测状态协方差的估计GydF4y2Ba :GydF4y2Ba
.GydF4y2Ba
误差椭圆的面积计算为GydF4y2Ba
.GydF4y2Ba
料仓的面积计算如下:GydF4y2Ba
.GydF4y2Ba
最后,箱中的闸门尺寸为GydF4y2Ba
.GydF4y2Ba
因此,门的大小取决于跟踪器、事件序列和箱子的分辨率。假设一个确认阈值,计算栅极生长序列GydF4y2BaNGydF4y2Ba等于3。假设汽车雷达的距离分辨率和距离速率分辨率分别为1米和1米/秒。金宝搏官方网站GydF4y2Ba
%计算栅极生长序列GydF4y2Bares=[1,1];GydF4y2Ba% Bin分辨率金宝搏官方网站[距离(m),距离速率(m/s)]GydF4y2BaGS = Helpercalculatezatesize(n,trkfilt,res)GydF4y2Ba
GS =GydF4y2Ba1×3.GydF4y2Ba51 124GydF4y2Ba
%计算全息算法GydF4y2Batic [pdtcghcustom,pftcghcustom] = toccgh(pd,pfa,GydF4y2Ba“确认阈值”GydF4y2Ba(mn),GydF4y2Ba“GateGrowthSequence”GydF4y2Ba, gs);elapsedTime = toc;helperUpdate (GydF4y2Ba“普通门的历史”GydF4y2Ba,闪光时间);GydF4y2Ba
通用门历史计算完成。总计算时间为0.0860秒。GydF4y2Ba
将plot添加到previous plotGydF4y2BahelperAddPlotLog (hax PftCGHcustom PdtCGHcustom,GydF4y2Ba'CGH与定制门增长序列'GydF4y2Ba);GydF4y2Ba
汽车雷达系统跟踪器性能评估GydF4y2Ba
虚警概率和目标轨迹要求的概率GydF4y2Ba
通过使用ROC和TOC,系统分析员可以选择满足整个系统要求的检测器的操作点。考虑汽车雷达的情况。由于应用的性质,希望假警报保持非常低的概率事件。此外,目标轨道的概率应该是高F。或安全的目的。考虑以下两个要求。GydF4y2Ba
要求1GydF4y2Ba 虚警概率必须小于GydF4y2Ba
要求2GydF4y2Ba 目标轨迹的概率必须等于0.9或以上GydF4y2Ba
计算信噪比为6、8、10和12 dB时的ROC曲线。GydF4y2Ba
%计算ROC曲线GydF4y2BasnrdB = [6 8 10 12];GydF4y2Ba%信噪比(dB)GydF4y2Ba(Pd, Pfa) = rocsnr (snrdB,GydF4y2Ba“MaxPfa”GydF4y2Ba,1e-3,GydF4y2Ba'minpfa'GydF4y2Ba1平台以及GydF4y2Ba“NumPoints”GydF4y2Ba,10);GydF4y2Ba
使用计算的ROC曲线作为输入GydF4y2BatoccghGydF4y2Ba函数生成相关的TOC曲线。使用之前生成的相同确认阈值和门生长序列。GydF4y2Ba
生成TOC曲线GydF4y2Batic toccgh(PD,PFA,GydF4y2Ba“确认阈值”GydF4y2Ba(mn),GydF4y2Ba“GateGrowthSequence”GydF4y2Ba, gs);elapsedTime = toc;helperUpdate (GydF4y2Ba“普通门的历史”GydF4y2Ba,闪光时间);GydF4y2Ba
通用门历史计算完成。总计算时间为0.7198秒。GydF4y2Ba
%要求1:误报的概率必须小于1E-6GydF4y2BahAxesROC=子批次(2,1,1);xlim([1e-10 1e-2])ylim([0 1])reqPfa=1e-6;helperColorZonesReqPfa(hAxesROC,reqPfa)图例(hAxesROC,GydF4y2Ba'地点'GydF4y2Ba,GydF4y2Ba'eastoutside'GydF4y2Ba)GydF4y2Ba%要求2:目标轨道的概率必须等于0.9或更高GydF4y2BahAxesTOC =次要情节(2,1,2);xlim([1e-14 1e-4]) ylim([0 1]) reqPdt = 0.9;helperColorZonesReqPdt (hAxesTOC reqPdt)GydF4y2Ba
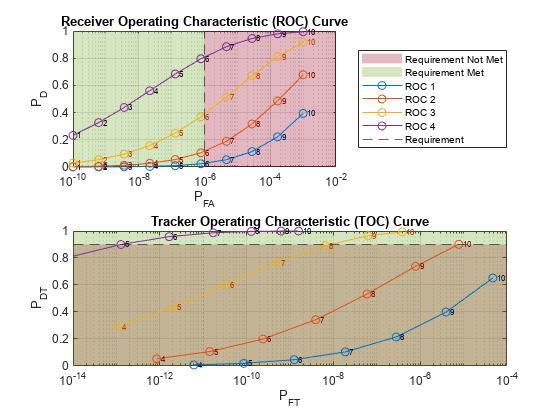
要求1表明,ROC曲线上只有点1到点6可以被纳入进一步分析,因为它们满足小于的概率GydF4y2Ba .第7至第10点不符合这一要求。GydF4y2Ba
对于要求2,6db信噪比对应的ROC曲线在任何一点都不满足要求2。唯一需要继续考虑的曲线是8、10和12 dB曲线。只有在8db曲线上的点10,在10db曲线上的点9和10,以及在12db曲线上的点5到10满足要求2。GydF4y2Ba
结合需求1和2,只有两个分析点满足两个需求GydF4y2Ba 12 dB曲线上的点5和6。点5对应于目标轨道的概率为0.90和错误轨迹的概率GydF4y2Ba ,这对应于检测0.68的概率和误报的概率GydF4y2Ba .类似地,点6对应于目标轨道的概率为0.96,错误轨迹的概率GydF4y2Ba ,检测概率为0.80,虚警概率为GydF4y2Ba .选择点6,它代表了目标轨迹改进概率的折衷,以稍高但合理的假轨迹概率为代价。GydF4y2Ba
CGH算法允许基于在环境中预期的目标数量和雷达数据中的小区数的目标数量估计预期的假曲目数。预期的假轨道数量GydF4y2Ba 是计算GydF4y2Ba
,GydF4y2Ba
在哪里GydF4y2Ba 在没有目标的情况下是假轨迹的概率,GydF4y2Ba 是细胞的数量,GydF4y2Ba 是目标存在的假轨迹的概率,以及GydF4y2Ba 是目标的数量。GydF4y2Ba
考虑一个环境,其中目标数等于10,细胞数等于GydF4y2Ba
%使用toccgh计算预期的假轨数GydF4y2BanumCells = 1 e5;GydF4y2Ba%雷达数据中的单元数GydF4y2BanumTargets = 10;GydF4y2Ba百分比的方案中的目标数量GydF4y2BaSENCESISPD = PD(6,4);GydF4y2Ba%选择探测概率GydF4y2BaselectedPFA = PFA(6);GydF4y2Ba%所选误报概率GydF4y2Ba(Pdt,击球时Eft) = toccgh (selectedPd selectedPfa,GydF4y2Ba......GydF4y2Ba“确认阈值”GydF4y2Ba(mn),GydF4y2Ba“GateGrowthSequence”GydF4y2Ba、gs、GydF4y2Ba......GydF4y2Ba'numcells'GydF4y2BanumCells,GydF4y2Ba'numtargets'GydF4y2Ba,10);GydF4y2Ba%输出结果GydF4y2BahelperPrintTrackProbabilities (Pdt,击球时Eft);GydF4y2Ba
目标航迹存在虚报的概率= 0.9581目标航迹存在虚报的概率= 1.6410e-12期望的假航迹数= 5GydF4y2Ba
因此,根据系统参数,您可以预期大约5个假轨。GydF4y2Ba
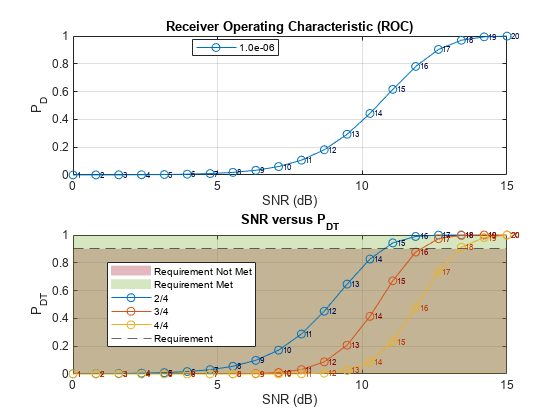
确认阈值分析GydF4y2Ba
考虑相同的汽车雷达设计案例,但调查确认阈值2/ 4,3 / 4,4 /4的影响。假设如下:GydF4y2Ba
要求1GydF4y2Ba 虚警概率必须小于GydF4y2Ba
要求2GydF4y2Ba 目标轨迹的概率必须等于0.9或以上GydF4y2Ba
首先,使用该计算ROC曲线GydF4y2BarocpfaGydF4y2Ba函数。GydF4y2Ba
%假设误报概率为1e-6,计算ROC曲线GydF4y2BaPFA = 1E-6;Numpoints = 20;[pd,snrdb] = rocpfa(pfa,GydF4y2Ba“NumPoints”GydF4y2Ba,数字,GydF4y2Ba'maxsnr'GydF4y2Ba15);GydF4y2Ba
由于观察次数较多,更新栅极生长序列。GydF4y2Ba
%更新栅极生长序列GydF4y2BaN = 4;trkfilt = trackingKF (GydF4y2Ba“MotionModel”GydF4y2Ba,GydF4y2Ba“自定义”GydF4y2Ba,GydF4y2Ba......GydF4y2Ba'statecovariance'GydF4y2Ba,[0 0;0 0],GydF4y2Ba......GydF4y2Ba“StateTransitionModel”GydF4y2Ba一个,GydF4y2Ba......GydF4y2Ba“ProcessNoise”GydF4y2Ba,q,GydF4y2Ba......GydF4y2Ba“MeasurementNoise”GydF4y2Ba,0,GydF4y2Ba......GydF4y2Ba“MeasurementModel”GydF4y2Ba,[1 0]);GS = Helpercalculatezatesize(n,trkfilt,res)GydF4y2Ba
GS =GydF4y2Ba1×4GydF4y2Ba1 51 124 225GydF4y2Ba
计算TOC给定的ROC曲线作为输入和确认阈值等于2/ 4,3 / 4,4。GydF4y2Ba
%计算总有机碳GydF4y2BaCP = [2 4;3 4;4 4];numcp = size(cp,1);pdtmat = zeros(numpoints,numcp);PFTMAT = Zeros(Numpoints,NumCP);Eftmat = Zeros(Numpoints,NumCP);GydF4y2Ba为GydF4y2BaII = 1:numcp [pdtmat(:,ii),pftmat(:,ii),eftmat(:,ii)] = toccgh(pd',pfa,GydF4y2Ba......GydF4y2Ba“确认阈值”GydF4y2Ba,cp(ii,:),GydF4y2Ba“GateGrowthSequence”GydF4y2Ba、gs、GydF4y2Ba......GydF4y2Ba'numcells'GydF4y2BanumCells,GydF4y2Ba'numtargets'GydF4y2Ba,10);GydF4y2Ba结束GydF4y2Ba%plot roc和tocGydF4y2Bareqpdt = 0.9;Helperplotroctoc(REQPDT,PFA,PD,SNRDB,PDTMAT,CP);GydF4y2Ba
HelperPrintreqValues(REQPDT,PD,SNRDB,PDTMAT,EFTMAT,CP);GydF4y2Ba
确认阈值= 2/4所需检测的概率= 0.55所需的信噪比预期的错误跟踪数量(dB) = 10.76 = 18确认阈值= 3/4所需检测的概率= 0.81所需信噪比预期的错误跟踪数量(dB) = 12.03 = 1确认阈值= 4/4所需检测的概率= 0.97所需的信噪比(dB) = 13.37预期的假轨数= 1GydF4y2Ba
回顾结果,您可以看到确认阈值越严格,所需的信噪比就越高。然而,更严格的确认阈值会导致虚假轨迹数量的增加。GydF4y2Ba
总结GydF4y2Ba
在评估跟踪器性能时,通常会计算出四种概率:GydF4y2Ba
在没有假警报的情况下,单一目标轨迹的概率GydF4y2Ba
在没有目标的情况下,单次假轨迹的概率GydF4y2Ba
单目标轨迹出现假警报的概率GydF4y2Ba
存在目标时单个假航迹的概率GydF4y2Ba
对于1,可以使用Bernoulli Sum。但是,为了获得其他概率,必须采用不同的方法。Monte Carlo分析可用于计算后一三种类型的概率,但是所需的计算资源和时间可能变得无法掌管,这对于具有低概率的事件尤其如此。公共栅极历史(CGH)算法可用于计算所有四个数量,大大减少所需的计算资源。GydF4y2Ba
CGH算法可用于生成跟踪器操作特征(TOC)。TOC赞美接收器的操作特征(ROC)并提供评估整体系统性能的手段。TOC和ROC曲线可以以多种方式使用,例如确定:GydF4y2Ba
所需目标信噪比GydF4y2Ba
跟踪确认阈值GydF4y2Ba
最后,CGH算法允许计算一个预期的假轨数量,这提供了对系统容量的洞察。假轨的预期数量可用于确定计算负载,并协助有关硬件和处理的决策。GydF4y2Ba
参考文献GydF4y2Ba
巴-沙洛姆,等。从接收机工作特性到系统工作特性:编队系统的评估GydF4y2Ba自动控制学报GydF4y2Ba,卷。35,不。2,1990年2月,第172-79页。Doi.org(CrossRef),DOI:10.1109 / 9.45173。GydF4y2Ba
Bar Shalom、Yaakov等GydF4y2Ba追踪与数据融合:算法手册GydF4y2Ba.YBS Publishing,2011。GydF4y2Ba
辅助函数GydF4y2Ba
函数GydF4y2BaPcnf = helperBernoulliSum (Pd, Mc, Nc)GydF4y2Ba计算简单的伯努利和。使用启动TOC逻辑,假设GydF4y2Ba%表示已经有一个命中来初始化音轨。GydF4y2Ba%更新M和N的删除概率GydF4y2Band = nc - 1;GydF4y2Ba%需要一击才能开始计数。假设第一次命中初始化轨道。GydF4y2BaMd = Nc - Mc + 1;GydF4y2Ba%需要这么多未命中删除GydF4y2Ba%伯努利和。删除概率计算。GydF4y2BaII = MD:ND;c = arrayfun(@(k)nchoosek(nd,k),ii);p =(1 - PD);PDEL = SUM(C. * P(:)。^ II。*(1 - P(:))。^(nd-ii),2);GydF4y2Ba%确认概率GydF4y2BaPcnf=1—Pdel;GydF4y2Ba结束GydF4y2Ba函数GydF4y2BahelperUpdate (calculationType elapsedTime)GydF4y2Ba%输出经过时间GydF4y2Bafprintf(GydF4y2Ba'%S计算完成。总计算时间为%.4f秒。\ n'GydF4y2Ba,GydF4y2Ba......GydF4y2Ba计算型,闪光时间);GydF4y2Ba结束GydF4y2Ba函数GydF4y2Bavarargout=helperPlot(x,y,displayName,xAxisName,yAxisName,titleName,varargn)GydF4y2Ba%在x轴上创建一个具有对数缩放的绘图GydF4y2Ba%创建一个数字GydF4y2Ba图(GydF4y2Ba“姓名”GydF4y2Ba,titlename)haxes = gca;GydF4y2Ba%绘图数据GydF4y2Ba情节(hax, x, y,GydF4y2Ba“线宽”GydF4y2Ba2,GydF4y2Ba'显示名称'GydF4y2BadisplayName,变长度输入宗量{:})持有(hax,GydF4y2Ba“上”GydF4y2Ba)网格(哈克斯,GydF4y2Ba“上”GydF4y2Ba)GydF4y2Ba%更新轴GydF4y2BahAxes.Title.String = titleName;hAxes.XLabel.String = xAxisName;hAxes.YLabel.String = yAxisName;GydF4y2Ba%确保传奇在最佳位置GydF4y2Ba传说(哈克斯,GydF4y2Ba'地点'GydF4y2Ba,GydF4y2Ba“最好的”GydF4y2Ba)GydF4y2Ba%设置轴为可选输出GydF4y2Ba如果GydF4y2Banargout==1 varargout{1}=hAxes;GydF4y2Ba结束GydF4y2Ba结束GydF4y2Ba函数GydF4y2Bavarargout = helperplotlog(x,y,displayname,xaxisname,yaxisname,titlename,varargin)GydF4y2Ba%在x轴上创建一个具有对数缩放的绘图GydF4y2Ba%创建一个数字GydF4y2Ba图(GydF4y2Ba“姓名”GydF4y2Ba,titlename)haxes = gca;GydF4y2Ba%绘图数据GydF4y2BanumCol =大小(y, 2);GydF4y2Ba为GydF4y2BaII = 1:Numcol Idxx = min(II,尺寸(x,2));hline = semilogx(hinalogx(hinal,x(:,idxx),y(:,ii),GydF4y2Ba“线宽”GydF4y2Ba2变长度输入宗量{:});GydF4y2Ba如果GydF4y2Baischar (displayName)线。DisplayName = DisplayName;GydF4y2Ba其他的GydF4y2BahLine.DisplayName=sprintf(GydF4y2Ba'信噪比(dB) = %.2f'GydF4y2Ba,显示名称(ii));GydF4y2Ba结束GydF4y2Ba持有GydF4y2Ba在GydF4y2Ba结束GydF4y2Ba网格GydF4y2Ba在GydF4y2Ba%更新轴GydF4y2BahAxes.Title.String = titleName;hAxes.XLabel.String = xAxisName;hAxes.YLabel.String = yAxisName;GydF4y2Ba%确保传奇在最佳位置GydF4y2Ba传说(哈克斯,GydF4y2Ba'地点'GydF4y2Ba,GydF4y2Ba“最好的”GydF4y2Ba)GydF4y2Ba%设置轴为可选输出GydF4y2Ba如果GydF4y2Banargout==1 varargout{1}=hAxes;GydF4y2Ba结束GydF4y2Ba结束GydF4y2Ba函数GydF4y2BahelperAddPlotLog (hax, x, y, displayName,变长度输入宗量)GydF4y2Ba%在具有对数缩放的轴轴上添加额外的曲线图GydF4y2Ba%轴GydF4y2Ba%绘图数据GydF4y2Ba持有GydF4y2Ba在GydF4y2Ba线= semilogx (hax, x, y,GydF4y2Ba“线宽”GydF4y2Ba2变长度输入宗量{:});线。DisplayName = DisplayName;GydF4y2Ba结束GydF4y2Ba函数GydF4y2BaGS = Helpercalculatezatesize(n,trkfilt,res)GydF4y2Ba%计算一个仓门的增长序列GydF4y2Ba%初始化跟踪器门增长序列GydF4y2Bags =零(1,n);GydF4y2Ba%栅极生长序列GydF4y2Ba利用预测状态不确定性来计算栅极生长序列GydF4y2Ba%线性近似。GydF4y2Ba区域= prod(res(:),1);GydF4y2Ba为GydF4y2Ban = 1:n [〜,pprEd] =预测(trkfilt);GydF4y2Ba% 预测GydF4y2Ba%计算1-sigma值的产品下载188bet金宝搏GydF4y2BaE = EIG(PPRED);e(e <0)= 0;GydF4y2Ba%删除负值GydF4y2Basigma1prod = sqrt(prod(e(:),1));GydF4y2Ba%计算误差椭圆面积GydF4y2BaareaErrorEllipse=pi*sigma1Prod;GydF4y2Ba椭圆= pi * a * b的%面积GydF4y2Ba%翻译成垃圾箱GydF4y2Bags(n)= max(CEIL(大区误导/面积),1);GydF4y2Ba结束GydF4y2Ba结束GydF4y2Ba函数GydF4y2BaHelpercolorzonesreqpfa(哈克斯,req)GydF4y2Ba%绘制需求类型1的颜色区域GydF4y2Ba垂直要求线GydF4y2Ba参照线(点播,GydF4y2Ba“——”GydF4y2Ba,GydF4y2Ba'显示名称'GydF4y2Ba,GydF4y2Ba“要求”GydF4y2Ba,GydF4y2Ba......GydF4y2Ba'抓住'GydF4y2Ba,GydF4y2Ba'离开'GydF4y2Ba);GydF4y2Ba%得到轴限制GydF4y2Baxlims = get(haxes,GydF4y2Ba'xlim'GydF4y2Ba);ylims = get(haxes,GydF4y2Ba“YLim”GydF4y2Ba);GydF4y2Ba%绿箱GydF4y2BaPos = [xlims(1) ylims(1) req ylims(2)];X = [pos(1) pos(1) pos(3) pos(3) pos(1)]Y = [pos(1) pos(4) pos(4) pos(1) pos(1)];hP = patch(hax,x,y,[0.4660 0.6740 0.1880]),GydF4y2Ba......GydF4y2Ba'Facealpha'GydF4y2Ba, 0.3,GydF4y2Ba“EdgeColor”GydF4y2Ba,GydF4y2Ba“没有”GydF4y2Ba,GydF4y2Ba'显示名称'GydF4y2Ba,GydF4y2Ba“满足要求”GydF4y2Ba);Uistack(惠普,GydF4y2Ba'底部'GydF4y2Ba);GydF4y2Ba%红盒子GydF4y2Bapos=[req ylims(1)xlims(2)ylims(2)];x=[pos(1)pos(1)pos(3)pos(3)pos(1)];y=[pos(1)pos(4)pos(4)pos(1)pos(1)];hP=patch(hax,x,y[0.6350 0.0780 0.1840],GydF4y2Ba......GydF4y2Ba'Facealpha'GydF4y2Ba, 0.3,GydF4y2Ba“EdgeColor”GydF4y2Ba,GydF4y2Ba“没有”GydF4y2Ba,GydF4y2Ba'显示名称'GydF4y2Ba,GydF4y2Ba“未满足要求”GydF4y2Ba,GydF4y2Ba......GydF4y2Ba'抓住'GydF4y2Ba,GydF4y2Ba'离开'GydF4y2Ba);Uistack(惠普,GydF4y2Ba'底部'GydF4y2Ba);GydF4y2Ba结束GydF4y2Ba函数GydF4y2BahelperColorZonesReqPdt (hax点播)GydF4y2Ba%绘制需求类型2的颜色区域GydF4y2Ba水平需求线%GydF4y2Bayline(点播,GydF4y2Ba“——”GydF4y2Ba,GydF4y2Ba'显示名称'GydF4y2Ba,GydF4y2Ba“要求”GydF4y2Ba,GydF4y2Ba......GydF4y2Ba'抓住'GydF4y2Ba,GydF4y2Ba'离开'GydF4y2Ba)GydF4y2Ba%得到轴限制GydF4y2Baxlims = get(haxes,GydF4y2Ba'xlim'GydF4y2Ba);ylims = get(haxes,GydF4y2Ba“YLim”GydF4y2Ba);GydF4y2Ba%绿箱GydF4y2BaPos = [xlims(1) req xlims(2) ylims(2)];X = [pos(1) pos(1) pos(3) pos(3) pos(1)]Y = [pos(1) pos(4) pos(4) pos(1) pos(1)];hP = patch(hax,x,y,[0.4660 0.6740 0.1880]),GydF4y2Ba......GydF4y2Ba'Facealpha'GydF4y2Ba, 0.3,GydF4y2Ba“EdgeColor”GydF4y2Ba,GydF4y2Ba“没有”GydF4y2Ba,GydF4y2Ba'显示名称'GydF4y2Ba,GydF4y2Ba“满足要求”GydF4y2Ba,GydF4y2Ba......GydF4y2Ba'抓住'GydF4y2Ba,GydF4y2Ba'离开'GydF4y2Ba);Uistack(惠普,GydF4y2Ba'底部'GydF4y2Ba);GydF4y2Ba%红盒子GydF4y2BaPOS = [XLIMS(1)REQ XLIMS(2)REQ];X = [pos(1) pos(1) pos(3) pos(3) pos(1)]Y = [pos(1) pos(4) pos(4) pos(1) pos(1)];HP =补丁(HAX,X,Y,[0.6350 0.0780 0.1840],GydF4y2Ba......GydF4y2Ba'Facealpha'GydF4y2Ba, 0.3,GydF4y2Ba“EdgeColor”GydF4y2Ba,GydF4y2Ba“没有”GydF4y2Ba,GydF4y2Ba'显示名称'GydF4y2Ba,GydF4y2Ba“未满足要求”GydF4y2Ba,GydF4y2Ba......GydF4y2Ba'抓住'GydF4y2Ba,GydF4y2Ba'离开'GydF4y2Ba);Uistack(惠普,GydF4y2Ba'底部'GydF4y2Ba);GydF4y2Ba结束GydF4y2Ba函数GydF4y2Ba帮助打印跟踪概率(Pdt、Pft、Eft)GydF4y2Ba%打印出结果GydF4y2Bafprintf(GydF4y2Ba'存在误报的目标轨迹概率= %.4f\n'GydF4y2Ba,pdt)fprintf(GydF4y2Ba“目标存在时的虚假跟踪概率= %.4e\n”GydF4y2Ba、击球)流(GydF4y2Ba'预期错误轨迹数= %d\n'GydF4y2Ba,EFT)GydF4y2Ba结束GydF4y2Ba函数GydF4y2BahelperPlotROCTOC(需求、Pfa、Pd、snrdB、PdtMat、cp)GydF4y2Ba%plot roc / tocGydF4y2Ba%绘制ROC曲线GydF4y2Ba图hAxesROC=子地块(2,1,1);地块(hAxesROC、snrdB、Pd、,GydF4y2Ba“o”GydF4y2Ba)标题(hAxesROC,GydF4y2Ba'接收器操作特征(ROC)'GydF4y2Ba)Xlabel(Haxesroc,GydF4y2Ba'snr(db)'GydF4y2Ba) ylabel (hAxesROCGydF4y2Ba“P_D”GydF4y2Ba)电网(hAxesROC,GydF4y2Ba“上”GydF4y2Ba)传说(hAxesROC sprintf (GydF4y2Ba“% .1e”GydF4y2BaPfa),GydF4y2Ba'地点'GydF4y2Ba,GydF4y2Ba“最好的”GydF4y2Ba)GydF4y2Ba%绘制SNR与目标轨道的概率GydF4y2BahAxesTOC =次要情节(2,1,2);numcp = size(cp,1);GydF4y2Ba为GydF4y2Baii = 1:numCp plot(hAxesTOC,snrdB, pdtbat (:,ii)),GydF4y2Ba“o”GydF4y2Ba,GydF4y2Ba......GydF4y2Ba'显示名称'GydF4y2Ba,Sprintf(GydF4y2Ba“% d / % d 'GydF4y2Ba,cp(ii,1),cp(ii,2)))持有(hAxesTOC,GydF4y2Ba“上”GydF4y2Ba)GydF4y2Ba结束GydF4y2Ba标题(hAxesTOC,GydF4y2Ba的信噪比与P_ {DT}’GydF4y2Ba)包含(hAxesTOCGydF4y2Ba'snr(db)'GydF4y2Ba)Ylabel(Haxestoc,GydF4y2Ba“P_{DT}”GydF4y2Ba)网格(Haxestoc,GydF4y2Ba“上”GydF4y2Ba)传说(hAxesTOCGydF4y2Ba'地点'GydF4y2Ba,GydF4y2Ba“最好的”GydF4y2Ba)GydF4y2Ba%标签点GydF4y2Bacolorvec = get(haxesroc,GydF4y2Ba'colorOrder'GydF4y2Ba);numSnr =元素个数(snrdB);textArray = arrayfun(@(x) sprintf(GydF4y2Ba' % d 'GydF4y2Ba, x), 1: numSnr,GydF4y2Ba'统一输出'GydF4y2Ba,错误的)。';xposroc = snrdb;colorfont = blighten(colorvec,-0.75);numcolors = size(colorvec,1);idxc = mod(1:numcp,numcolors);GydF4y2Ba%只使用可用的默认颜色GydF4y2BaIDXC(IDXC == 0)= NUMCOLORS;GydF4y2Ba%不要让颜色指数等于0GydF4y2Ba%标签点ROCGydF4y2Bayposroc = pd;文本(Haxesroc,Xposroc,Yposroc,textarray,GydF4y2Ba“字形大小”GydF4y2Ba,6,GydF4y2Ba'颜色'GydF4y2Ba,colorfont(1,:),GydF4y2Ba'剪裁'GydF4y2Ba,GydF4y2Ba“上”GydF4y2Ba)GydF4y2Ba%标签点GydF4y2BaxPosTOC = snrdB;GydF4y2Ba为GydF4y2Baii=1:numCp-yPosTOC=PdtMat(:,ii);text(hAxesTOC,xPosTOC,yPosTOC,textary,GydF4y2Ba“字形大小”GydF4y2Ba,6,GydF4y2Ba'颜色'GydF4y2BacolorFont (idxC (ii),:),GydF4y2Ba'剪裁'GydF4y2Ba,GydF4y2Ba“上”GydF4y2Ba)GydF4y2Ba结束GydF4y2Ba%添加要求区域色块GydF4y2BaHelpercolorzonesreqpdt(Haxestoc,Reqpdt);GydF4y2Ba结束GydF4y2Ba函数GydF4y2BahelperPrintReqValues (Pd, reqPdt snrdB、PdtMat EftMat, cp)GydF4y2Ba给出所需值的所需概率的输出信息GydF4y2Ba%目标轨道要求GydF4y2Ba%获得价值GydF4y2BanumCp =大小(PdtMat, 2);numCp reqPd = 0 (1);numCp reqSNRdB = 0 (1);numCp expEft = 0 (1);GydF4y2Ba为GydF4y2BaII = 1:numcp reqpd(ii)= interp1(pdtmat(:,ii),pd,reqpdt);reqsnrdb(ii)= interp1(pdtmat(:,ii),snrdb,reqpdt);Expeft(ii)= Interp1(PDTMAT(:,II),EFTMAT(:,II),REQPDT);GydF4y2Ba结束GydF4y2Ba%显示检测,SNR和预期假的概率GydF4y2Ba%轨道GydF4y2Ba为GydF4y2Baii = 1:numCp fprintf(GydF4y2Ba'确认阈值=%d/%d\n'GydF4y2Bacp (2, 1), cp (2, 2));fprintf(GydF4y2Ba'检测所需的概率=%.2f \ n'GydF4y2Ba,REQPD(II));fprintf(GydF4y2Ba'Required SNR (dB) = %.2f\n'GydF4y2Ba,reqsnrdb(ii));fprintf(GydF4y2Ba'错误轨迹的预期数量= %d\n\n'GydF4y2BaexpEft (ii));GydF4y2Ba结束GydF4y2Ba结束GydF4y2Ba
选择网站GydF4y2Ba
选择一个网站,在那里获得翻译的内容,并看到当地的活动和优惠。根据您的位置,我们建议您选择:GydF4y2Ba.GydF4y2Ba
选择GydF4y2Ba网站GydF4y2Ba你也可以从以下列表中选择一个网站:GydF4y2Ba
美洲GydF4y2Ba
- América拉丁GydF4y2Ba(Español)GydF4y2Ba
- 加拿大GydF4y2Ba(英语)GydF4y2Ba
- 美国GydF4y2Ba(英语)GydF4y2Ba
欧洲GydF4y2Ba
- 比利时GydF4y2Ba(英语)GydF4y2Ba
- 丹麦GydF4y2Ba(英语)GydF4y2Ba
- 德意志GydF4y2Ba(德意志)GydF4y2Ba
- 西班牙GydF4y2Ba(Español)GydF4y2Ba
- 芬兰GydF4y2Ba(英语)GydF4y2Ba
- 法国GydF4y2Ba(法兰西)GydF4y2Ba
- 爱尔兰GydF4y2Ba(英语)GydF4y2Ba
- 意大利GydF4y2Ba(意大利语)GydF4y2Ba
- 卢森堡GydF4y2Ba(英语)GydF4y2Ba
- 荷兰GydF4y2Ba(英语)GydF4y2Ba
- 挪威GydF4y2Ba(英语)GydF4y2Ba
- 奥地利GydF4y2Ba(德意志)GydF4y2Ba
- 葡萄牙GydF4y2Ba(英语)GydF4y2Ba
- 瑞典GydF4y2Ba(英语)GydF4y2Ba
- 瑞士GydF4y2Ba
- 英国GydF4y2Ba(英语)GydF4y2Ba
亚太地区GydF4y2Ba
- 澳大利亚GydF4y2Ba(英语)GydF4y2Ba
- 印度GydF4y2Ba(英语)GydF4y2Ba
- 新西兰GydF4y2Ba(英语)GydF4y2Ba
- 中国GydF4y2Ba
- 日本语GydF4y2Ba(日本语)GydF4y2Ba
- 한국GydF4y2Ba(한국어)GydF4y2Ba