海洋雷达杂波仿真
本例将介绍海上监视雷达系统的海杂波模拟。本例首先讨论与海况相关的物理特性。然后讨论海面反射率,研究海况、频率、极化和掠射角的影响。最后,本例计算cl考虑传播路径和天气影响的海上监视雷达系统的绝对噪声比(CNR)。
海国概况
在描述海杂波时,首先要确定海面的物理性质。在雷达海杂波建模中,有三个重要参数:
为波高的标准差。波高定义为波峰与相邻波谷之间的垂直距离。
是波浪的斜率。
是风速。
由于波浪的不规则性,海水的物理性质常常用海况来描述。道格拉斯海况数是一个广泛使用的尺度,它代表了广泛的物理海洋特性,如海浪高度和相关的风速。在刻度的低端,海洋状态为0表示平静的、玻璃般的海洋状态。然后,规模从轻微的波纹的海况1到大浪高的海况5。海况为8时,浪高可大于9米或更高。
使用searoughness函数,绘制海况1到5的海况属性。注意波浪坡度的缓慢增加
与海的状态。这是波长和波高随风速增加而增加的结果,尽管有不同的因素。
海区1到5的%分析党卫军= 1:5;%海州%初始化输出numSeaStates =元素个数(ss);numSeaStates hgtsd = 0 (1);numSeaStates beta0 = 0 (1);大众= 0(1、numSeaStates);%获取海况属性为是= 1:Numsealtate [HGTSD(IS),Beta0(IS),VW(是)] =灼烧(SS(是));结束%绘图结果HelperPlotseRoughness(ss、hgtsd、beta0、vw);

您介绍的物理属性是开发海事场景的几何和环境的重要组成部分。此外,正如您所看到的那样,海面的雷达回报呈现出对海州的强烈依赖。
反射率
海水表面是由平均盐度约为千分之三十五的水组成的。海水的反射系数接近 1为微波频率和低掠角。
对于光滑的海面,波浪高度很小,海面看起来就像一个无限大、平坦的导电板,背散射很小甚至没有。随着海况数的增加和浪高的增加,表面粗糙度增大。这导致增加的散射是方向相关的。此外,反射率对波浪高度有很强的比例依赖性,对风速的依赖性随频率的增加而增加。
研究海洋表面反射率与频率为各种海况使用seareflective函数。将掠角设置为0.5度,并考虑500mhz至35ghz范围内的频率。
grazAng = 0.5;掠角(deg)频率= linspace (0.5 e9 35 e9,100);%频率(赫兹)波尔=“H”;%水平极化%初始化反射率输出numfreq = numel(freq);nrcsh = zeros(numfreq,numsealtates);%计算反射率为= 1:numseastates nrcsh(:,是)= seareflectivity(ss(是),grazang,freq,“极化”,Pol);结束%绘图反射率grazAng helperPlotSeaReflectivity (ss,频率,nrcsH,波尔);

该图显示,海面反射率与频率成正比。此外,随着海况数的增加,对应于粗糙度的增加,反射率也会增加。
极化效应
其次,考虑极化效应对海面反射率的影响,保持与前一段相同的掠射角和频率跨度。
波尔=“V”;%垂直极化%初始化反射率输出numfreq = numel(freq);NRCSV =零(NumFreq,Numsealate);%计算反射率为is = 1: numsestatates nrcsV(:,is) = sereflectivity (ss(is),grazAng,freq,“极化”,Pol);结束%绘图反射率Haxes = HelperplotseAleflectivity(SS,Grazang,Freq,NRCSH,“H”);HelperplotseAleflexectivity(SS,Grazang,Freq,NRCSV,“V”, hax);

该图表明基于极化的反射率存在显着影响。请注意,水平和垂直偏振之间的差值在较低频率下更大,而不是较高频率。随着海区数量的增加,水平和垂直偏振之间的差异降低。因此,随着频率的增加,对极化的依赖性降低。
放牧角度效果
考虑掠角的影响。计算在1.5 GHz的l波段频率范围内0.1到60度的海洋反射率。
grazAng = linspace (0.1, 60100);掠角(deg)频率=1.5e9;%L波段频率(Hz)%初始化反射率输出numGrazAng =元素个数(grazAng);nrcsH = 0 (numGrazAng numSeaStates);nrcsV = 0 (numGrazAng numSeaStates);%计算反射率为= 1:numseastates nrcsh(:,是)= seareflectivity(ss(是),grazang,freq,“极化”,“H”);nrcsV (:,) = seareflectivity (ss(是),grazAng,频率,“极化”,“V”);结束%绘图反射率Haxes = HelperplotseAleflectivity(SS,Grazang,Freq,NRCSH,“H”);HelperplotseAleflexectivity(SS,Grazang,Freq,NRCSV,“V”, hax);ylim (hax (-60 -10));
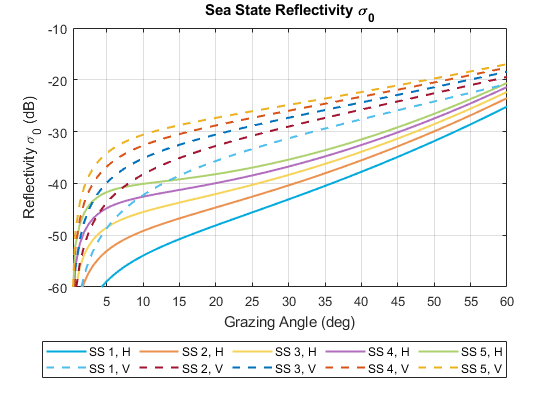
从该图中,注意,在较低的放牧角度下海边反射率有更多的变化,垂直和水平极化之间存在差异。该图表明,随着放牧角度的增加,对放牧角度的依赖性降低。此外,水平极化信号的反射率小于所考虑的放牧角度的相同海区的垂直偏振信号。
海上监视雷达实例
计算杂波对噪声比
考虑在6 GHz(C波段)操作的水平极化海上监视雷达系统。定义雷达系统。
%雷达参数频率= 6 e9;c波段频率(Hz)anht = 20;%的高度(米)ppow=200e3;%峰值功率(W)tau=200e-6;%脉冲宽度(秒)脉冲重复频率= 300;%脉冲重复频率(赫兹)AZBW = 10;半功率方位波束宽度(deg)elbw = 30;%半功率仰角波束宽度(deg)Gt=22;发射增益(dB)Gr = 10;接收增益(dB)nf = 3;%噪声系数(dB)Ts = systemp (nf);%系统温度(K)
接下来,模拟一个海况为2的操作环境。计算和绘图的海面反射率为掠角的定义几何。
%海洋参数ss=2;%海国%计算表面状态[hgtsd, beta0] = searoughness (ss);%设置几何anht=anht+2*hgtsd;杂波上方平均高度(m)surfht = 3 * hgtsd;%表面高度(m)%计算模拟的最大范围Rua = time2range(1 /脉冲重复频率);最大无歧义范围(m)rhoriz = horialongrange(anht,“SurfaceHeight”,surfht);%地平线范围(M)征求= min (Rua Rhoriz);%最大仿真范围(m)%生成用于模拟的范围向量征求Rm = linspace(100年,1000年);%射程(米)RKM = RM * 1E-3;%范围(公里)%计算海杂波反射率grazAng = grazingang (anht, Rm,“TargetHeight”,surfht);nrcs = seareflectivity(ss,grazang,freq);HelperplotseAleflexectivity(SS,Grazang,Freq,NRC,“H”);

接下来,使用clutterSurfaceRCS函数。注意当雷达到达地平线范围时杂波RCS的下降。
%计算杂波RCSrcs=杂波表面辐射源(nrcs、Rm、azbw、elbw、grazAng(:),tau);rcsdB=功率2dB(rcs);%转换为分贝标绘hax = helperPlot (Rkm rcsdB,'rcs',“杂乱RCS (dBsm)”,'杂乱雷达横截面(RCS)');Helperaddhorizline(Haxes,Rhoriz);

计算杂波对噪声比(CNR)使用radareqsnr再次注意,当模拟范围接近雷达视界时,CNR下降。计算杂波低于噪声的范围。
将频率转换为波长λ= freq2wavelen(频率);计算并绘制杂讯比中国北车= radareqsnr(λ,Rm (:), ppowτ,......“获得”(Gt Gr),“rcs”rcs,“t”、Ts);% D bhax = helperPlot (Rkm、中国北车、'cnr',“中国北车(dB)”,“Clutter-to-Noise比率(CNR)”);ylim (hax (-80 100));helperAddHorizLine (hax Rhoriz);helperAddBelowClutterPatch (hax);

当杂波低于噪声时的范围helperFindClutterBelowNoise (Rkm cnr);
杂波低于噪声的距离(公里)= 18.04
考虑传播路径
当雷达和杂波之间的路径偏离自由空间条件时,包括杂波传播因子和路径上的大气损耗。可以使用radarpropfactor函数。
%计算杂波的雷达传播因子Fc = radarpropfactor (Rm,频率、anht surfht,......“SurfaceHeightStandardDeviation”hgtsd,......“表面坡度”,beta0,......''海面曝光',elbw);Helperplot(RKM,FC,“传播因素”,......“传播因素(dB)”,......'单向杂波传播因子F_C');

在上图中,可以看到两个传播区域:
干扰区域:反射干扰直射光线的区域。这在有悬垂的范围内显示。
中间区域:这是干涉区域和衍射区域之间的区域,其中衍射区域定义为地平线以外的阴影区域。在本例中,中间区域出现在约1.5km处曲线的扭结处,通常通过干涉区域和衍射区域之间的插值来估计。
一般情况下,杂波传播因子和海洋反射率结合为产物 ,因为表面反射率的测量通常是对产品的测量,而不仅仅是反射率 .计算这个乘积并绘制结果。
%结合杂波反射率和杂波传播因子FCLINEAR = DB2MAG(FC);%转换为线性单位组合物= NRC。* fclinear。^ 2;组合活动B = POW2DB(组合物);Helperplot(RKM,ComplofFactoldB,“\ sigma_CF_C”,......'\ sigma_cf_c(db)',......“单向海杂波传播因子和反射率”);

接下来,使用斜路径计算路径上的大气损失tropopl作用使用默认的标准大气模型进行计算。
计算与大气有关的单向损失elAng=高度2el(表面、非表面、Rm);%仰角(DEG)元素个数=元素个数(elAng);躺= 0(元素个数,1);为IE = 1:Numel Latmos(即:)= Tropotl(RM(即),频率,Anht,elang(IE));结束helperPlot (Rkm躺,'大气损失','损失(DB)','单程大气损失');

中国北车重新计算。计算中包括传播因子和大气损耗。注意CNR曲线形状的变化。当你考虑这些因素时,杂波低于噪声的点在范围内会更接近。
重新计算CNR,包括雷达传播因子和大气损失中国北车= radareqsnr(λ,Rm (:), ppowτ,......“获得”(Gt Gr),“rcs”rcs,“t”Ts,......“传播因子”,Fc,......“AtmosphericLoss”,躺);% D bhelperAddPlot (Rkm、中国北车、“CNR +传播因子+大气损耗”, hax);

当杂波低于噪声时的范围helperFindClutterBelowNoise (Rkm cnr);
杂波低于噪声(km) = 10.44的距离
了解天气效果
正如大气影响目标的检测一样,天气也会影响杂波的检测。考虑雨水对模拟范围的影响。首先计算雨衰减。
计算与雨有关的单向损失rr = 50;雨率%(mm / h)polAng = 0;%偏振倾斜角(水平方向为0度)elAng=高度2el(表面、非表面、Rm);%仰角(DEG)努梅尔=努梅尔(elAng);Lrain=零(努梅尔,1);为ie=1:numEl Lrain(ie,:)=cranerainpl(Rm(ie)、freq、rr、elAng(ie)、polAng);结束helperPlot (Rkm Lrain,“雨损失”,'损失(DB)',“单向雨损失”);

中国北车重新计算。包括传播路径和降雨损失。请注意,由于降雨的存在,CNR只有轻微的下降。
重新计算CNR,包括雷达传播因子,大气损失,%及雨损中国北车= radareqsnr(λ,Rm (:), ppowτ,......“获得”(Gt Gr),“rcs”rcs,“t”Ts,......“传播因子”,Fc,......“AtmosphericLoss”,拉丁美洲+液体);% D bhelperAddPlot (Rkm、中国北车、'CNR +传播系数+大气损失+雨', hax);

当杂波低于噪声时的范围helperFindClutterBelowNoise (Rkm cnr);
杂波低于噪声的距离(km) = 9.61
总结
这个例子介绍了关于海面模拟的概念。海洋反射率具有以下特性:
高度依赖海况
对频率的比例依赖性
对极化的依赖,随频率的增加而减小
在低掠角时,掠角对掠角有很强的依赖性
本示例还讨论了如何使用海况物理特性和反射率计算海上监视雷达系统的杂波噪声比。此外,本示例还说明了改进传播路径模拟的方法。
参考文献
巴顿,大卫·诺克斯。现代雷达的雷达方程.Artech House雷达系列。马萨诸塞州波士顿:Artech House, 2013年。
布莱克,l . V。雷达垂直面覆盖图的机器绘制.NRL报告,7098,海军研究实验室,1970年。
格雷格·汉森和R·米塔尔。雷达海杂波反射率的改进经验模型.NRL / MR,2012年4月27日的海军研究实验室先生,5310 - 12-9346。
理查兹硕士,吉姆·希尔,威廉·霍尔姆和威廉·梅尔文主编。现代雷达原理.北卡罗来纳州罗利:SciTech Pub, 2010。
函数helperPlotSeaRoughness (ss、hgtsd beta0,大众)%创建海面粗糙度输出的3x1图%创建数字数字海波高度的%绘制标准偏差子地块(3,1,1)地块(ss、hgtsd、,“o”,“线宽”,1.5)Ylabel([Sprintf(“波\n光”)' \ sigma_h (m) '])标题(“海浪粗糙度”)网格在;绘制海浪坡度图次要情节(3、1、2)情节(ss、beta0“o”,“线宽”,1.5)Ylabel([Sprintf(“波\ nSlope”)“\ beta_0(度)])网格在;%绘制风速图子图(3,1,3)绘图(SS,VW,“o”,“线宽”(1.5)包含“海洋国家”ylabel([Sprintf(“风\ nVelocity”)“v_w(m/s)”])网格在;结束函数hax = helperPlotSeaReflectivity (ss、grazAng频率,nrc,波尔,hax)%绘图海反射率%如果没有传入坐标轴,创建图形和新的坐标轴newFigure = false;如果Nargin < 6图();甘氨胆酸hax =;newFigure = true;结束得到极化串开关下(pol)案例“h”线型=“- - -”;否则线型=“——”;结束%的阴谋如果numel(grazAng)==1 hLine=semilogx(hAxes,freq(:).*1e-9,pow2db(nrcs),线型,“线宽”, 1.5);包含('频率(GHz)')其他的线=情节(hax grazAng (:), pow2db (nrc)线型,“线宽”, 1.5);包含(掠射角(度))结束%设置显示名称numLines =大小(nrc, 2);为ii = 1:numLines hLine(ii)。DisplayName = sprintf (党卫军% d %年代”ss (ii),波尔);如果newFigure线(ii)。Color = brighten(hLine(ii).Color,0.5);结束结束%更新标签和轴ylabel ('反射率\sigma_0(dB)')头衔('海州反射率\ sigma_0')网格在轴牢固的持有在;%添加图例传奇(“位置”,'southoutside',“NumColumns”5,“定位”,'水平的');结束函数varargout=helperPlot(Rkm,y,displayName,ylabelStr,titleName)%用于CNR分析%创建数字hFig =图;hax =轴(hFig);%的阴谋情节(Rkm hax, y,“线宽”, 1.5,'显示名称',显示名称);网格(hAxes,“上”);持有(hax“上”);包含(hax“行驶里程(km)”)ylabel(hAxes,ylabelStr);title(hAxes,titleName);axis(hAxes,“紧”);%添加图例传奇(hax“位置”,“最佳”)%输出轴如果nargout ~= 0 varargout{1} = hax;结束结束函数helperAddPlot(Rkm、y、displayName、hAxes)%用于CNR分析%的阴谋ylimsIn =得到(hax,“Ylim”);情节(Rkm hax, y,“线宽”, 1.5,'显示名称'displayName);轴(hax“紧”);ylimsNew =得到(hax,“Ylim”);集(hax,“Ylim”,[ylimsin(1)ylimsnew(2)]);结束函数helperAddHorizLine (hax Rhoriz)添加指示水平距离的垂线Xline(Rhoriz。* 1E-3,“——”,'显示名称','地平线范围',“线宽”, 1.5);xlims =得到(hax,“XLim”);xlim ([xlims (1) Rhoriz。* 1 e - 3 * (1.05)]);结束函数helperAddBelowClutterPatch(hAxes)当杂波低于杂色时添加补丁xlims =得到(hax,“Xlim”);ylims =得到(hax,“Ylim”);x=[xlims(1)xlims(1)xlims(2)xlims(2)xlims(1)];y=[ylims(1)0 0 ylims(1)ylims(1)];hP=patch(hax,x,y,[0.8 0.8 0.8],......'Facealpha', 0.3,“EdgeColor”,“没有”,'显示名称',“下面的杂波噪声”);uistack(惠普、'底部');结束函数HelperfindclutterBelownoise(RKM,CNR)%找到了杂乱的点低于噪音idxnotneginf =〜Isinf(CNR);rclutterbelow = Interp1(CNR(idxnotneginf),RKM(IdxNotneginf),0);fprintf('杂乱的范围低于噪音(km)=%.2f \ n',见下文)结束
你也可以从以下列表中选择一个网站: