模拟偏振雷达返回进行天气观测
这个例子演示了如何模拟满足天气观测要求的偏振多普勒雷达返回。雷达在气象观测、灾害探测、降水分类量化、预报预报等方面发挥着重要作用。此外,偏振雷达还提供了前所未有的多参数测量质量和信息。这个例子演示了如何模拟扫描分布天气目标区域的偏振多普勒雷达。根据著名的NEXRAD雷达规范,仿真得到雷达参数。对接收到的脉冲进行综合后,进行雷达谱矩估计和极化矩估计。将估计值与NEXRAD地面真值进行比较,得到误差统计量并评价数据质量。
雷达的定义
一个众所周知的气象雷达是天气监视雷达,1988多普勒(WSR-88D),也被称为NEXRAD,这是由美国国家气象局,FAA和国防部操作。欲了解更多信息,请参阅NEXRAD雷达操作中心的网站。
雷达系统规范设计如下:
max_range = 100年e3;最大无歧义范围(m)range_res = 250;所需距离分辨率(m)pulnum = 32;%在一个方位角上要处理的脉冲数fc = 2800 e6;%频率(赫兹)prop_speed = physconst (“光速”);传播速度(m/s)λ= prop_speed / fc;%波长(m)
把这些要求雷达参数,我们遵循的例子中的过程模拟测试信号的雷达接收机.在本例中,为了简单起见,负载预先计算雷达参数。
负载NEXRAD_Parameters.mat
天线模式
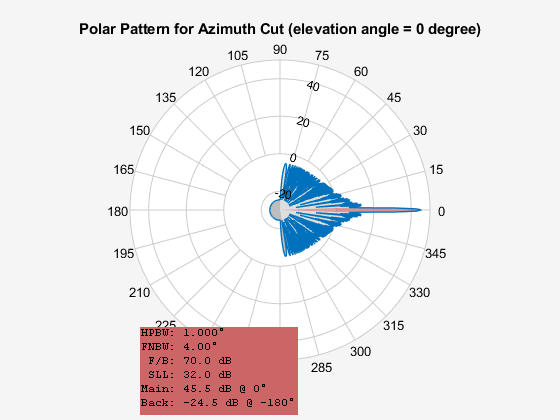
由于NEXRAD是极化的,因此对天线和天气目标的极化特性进行建模是非常重要的。根据NEXRAD规范,天线方向图的波束宽度约为1度,第一副瓣低于-30 dB。
azang = [180:0.5:180];elang = [90:0.5:90];我们使用各向同性的天线单元和锥形的图案%振幅分布,使其符合NEXRAD规范。magpattern =负载(“NEXRAD_pattern.mat”);phasepattern = 0(大小(magpattern.pat));假定极化天线具有理想的水平匹配%和垂直极化图。天线=分阶段。CustomAntennaElement ('AzimuthAngles'azang,......“ElevationAngles”elang,......'HorizontalMagnitudePattern',magpattern.pat,......'VerticalMagnitudePattern',magpattern.pat,......“HorizontalPhasePattern”phasepattern,......'VerticalPhasePattern'phasepattern,......'SpecifyPolarizationPattern',真的);清除magpattern清除phasepattern
绘制天线方向图的方位角切线。
d =图案(天线,FC,azang,0);P = polarpattern(azang,d,“TitleTop”那方位角切割的极图(仰角= 0度));P.AntennaMetrics = 1;removeAllCursors(P);
关联与散热器和集电极阵列。
散热器=分阶段。散热器(......“传感器”,天线,“极化”那“双重”那......“OperatingFrequency”、fc);收集器=分阶段。收集器(......“传感器”,天线,“极化”那“双重”那......“OperatingFrequency”、fc);
天气目标
一般来说,天气雷达数据分为三个层次。一级数据是原始时间序列I/Q数据,作为雷达数据采集单元信号处理器的输入。二级数据由信号处理器输出的雷达光谱矩(反射率、平均径向速度和谱宽)和极化矩(微分反射率、相关系数和微分相位)组成。iii级数据是雷达产品发生器输出的产品数据,如水流星分类、风暴总降水量、龙卷风涡旋特征等。
在这个例子中,在20时08分11秒UTC 5月20日从KTLX NEXRAD雷达液位-II的数据,2013年使用。此数据来自发生在摩尔,俄克拉荷马州和用于生成的平均雷达截面(RCS)的强烈龙卷风等效散射中心.该数据是通过提供FTP下载.它表示一个体积扫描,包括在指定的时间内完成的在预定仰角对天线的一系列360度扫描。在数据文件名称中KTLX20130520_200811_V06那KTLX指的是雷达站点名称,20130520_200811是指日期和时间被收集的数据的情况下,和V06为版本6的数据格式。在这个模拟中,以从体积扫描数据中提取最低海拔切割(0.5度)为例。
阅读中的Level-II数据到工作区。它存放在nexrad结构阵列,其包含所有的雷达的时刻,以及方位角字段,用于指定在笛卡尔每个径向数据点的方位角坐标系。为简单起见,加载被从压缩文件到MAT文件变换NEXRAD数据。
负载NEXRAD_data.mat;
用直角坐标的方位角和距离定义一个感兴趣的区域(AOI)。
AZ1 = 96;起始方位角(度)az2 = 105;%结束方位角(度)皂苷Rg1 = 22750;起始范围(m)rg2 = 38750;%结束范围(m)%NEXRAD具有2000米的盲区。blind_rg = 2000;我们定义了天气目标占据的方位角的数量二维平面。num_az = 40;我们定义了天气目标在每个目标中所占据的范围容器的数量%二维平面的方位径向。num_bin = 150;%选择AOI数据,并将其存储_nexrad_aoi_结构阵列中,这%包含所有雷达力矩以及起始和结束方位角%和范围指数。和可用天气的数量,空间目标%作为Ns返回。(nexrad_aoi, Ns) = helperSelectAOI (nexrad、az1 az2, rg1, rg2, blind_rg, range_res, num_az, num_bin);
由于天气目标是偏振的,并且分布在一个平面上,因此可以通过指定离散方位角的散射矩阵来表示。天气目标反射率定义为单位体积的平均后向散射截面。根据天气雷达方程,天气目标可以看作是每个分辨率体积内的小目标的集合。将总反射率转化为平均RCS,并将其视为等效散射中心。因此,散射矩阵中的每个元素都是相应偏振下RCS的平方根。
%预分配目标位置、速度、RCS、方位、仰角和雷达%散射矩阵。tgtpos = 0 (3, Ns);tgtvel = 0 (3, Ns);RCSH = 0(1、Ns);RCSV = 0(1、Ns);Azpatangs = [- 180180];Elpatangs = [-90 90];shhpat = 0 (2, 2, Ns);svvpat = 0 (2, 2, Ns);shvpat = 0 (2, 2, Ns);zz = 0;%NEXRAD波束宽度是大约1度。波束宽度= 1.0;为Ii = nexrad_aoi.rlow:nexrad_aoi.rup theta = nexrad_azimuth (Ii);为jj = 1: num_bin如果isnan(nexrad.ZH(II,JJ))== 0 ZZ = ZZ + 1;RPOS =(JJ-1)* + range_res blind_rg;TPOS = [RPOS * COSD(THETA); RPOS *信德(THETA); 0];tgtpos(:,ZZ)= TPOS;RCSH(ZZ)= helperdBZ2RCS(波束宽度,RPOS,λ,pulse_width,nexrad.ZH(II,JJ),prop_speed);shhpat(:,:,ZZ)= SQRT(RCSH(ZZ))*也是(2,2);RCSV(ZZ)= helperdBZ2RCS(波束宽度,RPOS,λ,pulse_width,nexrad.ZV(II,JJ),prop_speed);svvpat(:,:,ZZ)= SQRT(RCSV(ZZ))*也是(2,2);结束结束结束tgtmotion =分阶段。平台(“InitialPosition”tgtpos,“速度”, tgtvel);=阶段性目标。BackscatterRadarTarget ('EnablePolarization',真的,......“模型”那“Nonfluctuating”那'AzimuthAngles'azpatangs,......“ElevationAngles”elpatangs,'ShhPattern'shhpat,'ShvPattern',shvpat,......'SvvPattern'svvpat,“OperatingFrequency”、fc);
雷达脉冲合成
使用定义的雷达系统参数生成雷达数据立方体。在每个分辨率体积内,包括适当的相关性,以确保得到的I/Q数据呈现适当的天气信号统计属性。
rxh_aoi =复杂(0 (nexrad_aoi.rgnum nexrad_aoi.aznum));rxv_aoi =复杂(0 (nexrad_aoi.rgnum nexrad_aoi.aznum));%实现序列的数量realiznum = 1000;%不可用范围段由于NEXRAD盲范围的数量i0 = blind_rg / range_res;%旋转传感器平台,模拟NEXRAD的方位扫描为kk = 1: nexrad_aoi。Aznum轴= rotz(nexrad.azimuth(kk+nexrad_aoi.r1-1));%更新传感器和目标位置[sensorpos, sensorvel] = sensormotion(1 /脉冲重复频率);[tgtpos, tgtvel] = tgtmotion(1 /脉冲重复频率);%计算传感器看到的目标角度[tgtrng, tgtang] = rangeangle (tgtpos sensorpos,轴);%形成该扫描角度的发射波束并模拟传播脉冲=波形();[txsig, txstatus] =发射机(脉冲);%采用同时传输和接收模式作为NEXRADtxsig =散热器(txsig, txsig tgtang,轴);txsig =通道(txsig sensorpos、tgtpos sensorvel, tgtvel);反射目标的脉冲ang_az = tgtang(1:2:结束);ang_az = ang_az +(1) ^(双(ang_az > 0)) * 180;tgtsig =目标(txsig [ang_az; 0(大小(ang_az))],轴);收集从传感器接收到的目标返回[rxsig_h, rxsig_v] =收集器(tgtsig tgtang,轴);rxh =接收机(rxsig_h ~ (txstatus > 0));rxv =接收机(rxsig_v ~ (txstatus > 0));%匹配滤波[rxh, mfgainh] = matchedfilter(rxh);[rxv, mfgainv] = matchedfilter(rxv);rxh = [rxh (matchingdelay + 1:结束);0 (matchingdelay 1)];rxv = [rxv (matchingdelay + 1:结束);0 (matchingdelay 1)];%大量毁灭rxh = rxh(1:2:结束);rxv = rxv(1:2:结束);%丢弃盲范围数据,并选择AOI数据rxh_aoi(:,KK)= RXH(nexrad_aoi.b1 + I0:nexrad_aoi.b2 + I0);rxv_aoi(:,KK)= RXV(nexrad_aoi.b1 + I0:nexrad_aoi.b2 + I0);结束清除txsig清除tgtsig
天气雷达矩估计
利用脉冲对处理,从相关估计中计算所有雷达矩,包括反射率、平均径向速度、谱宽、微分反射率、相关系数和微分相位。
时刻= helperWeatherMoment (rxh_aoi rxv_aoi、nexrad_aoi pulnum, realiznum, prt,λ);
仿真结果
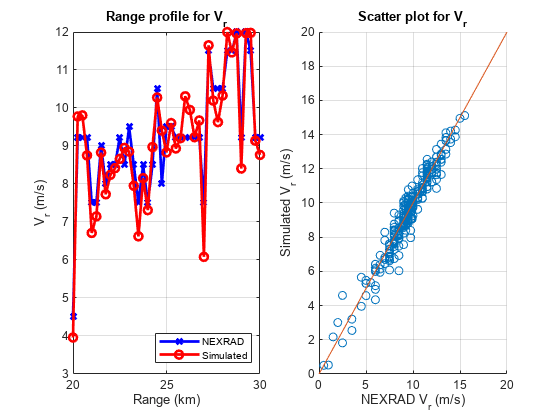
比较与新一代天气雷达地面实况仿真结果。评估使用错误统计的模拟数据质量,一个部门的形象,一定范围的空间,散点图。错误的统计数据表示为偏置和比较,新一代天气雷达的Level-II数据(真理字段)估计雷达时刻的标准偏差。
定义方位和范围绘制。
方位= nexrad.azimuth (nexrad_aoi.r1: nexrad_aoi.r2);Range = (nexrad_aoi.b1-1:nexrad_aoi.b2-1)*250 + 2000;
反射率
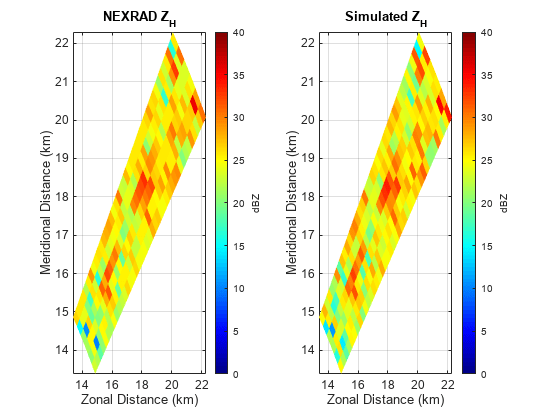
反射率, ,为多普勒谱的零矩,与分辨率体积内的液态水含量或降水速率有关。因为价值观在天气观测中常见的跨越多个数量级的现象,雷达气象学家使用的是给出的对数尺度
,为多普勒谱的零矩,与分辨率体积内的液态水含量或降水速率有关。因为价值观在天气观测中常见的跨越多个数量级的现象,雷达气象学家使用的是给出的对数尺度 作为DBZ,其中的单位是mm^6/m^3。
作为DBZ,其中的单位是mm^6/m^3。
[Z_bias, Z_std] = helperDataQuality (nexrad_aoi、时刻、范围、方位、“Z”);

径向速度
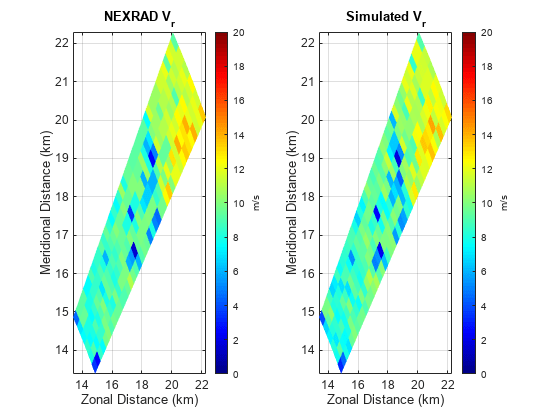
径向速度, ,是功率归一化的光谱,这反映了朝向或远离雷达空气运动的一阶矩。
,是功率归一化的光谱,这反映了朝向或远离雷达空气运动的一阶矩。
[Vr_bias, Vr_std] = helperDataQuality (nexrad_aoi、时刻、范围、方位、“虚拟现实”);
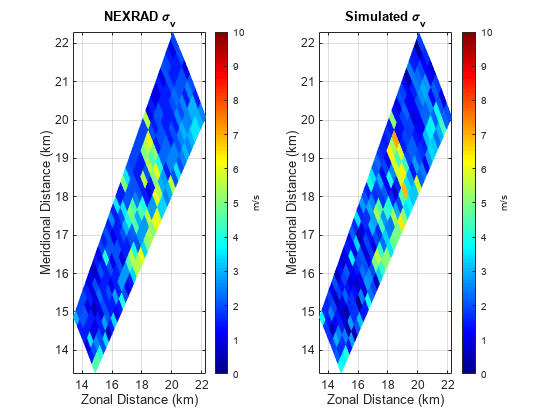
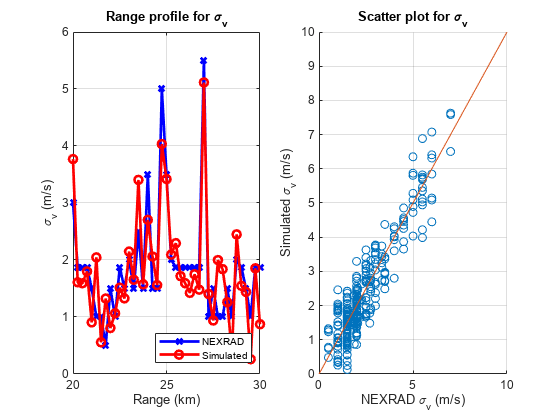
频谱宽度
频谱宽度, ,为归一化谱的二阶矩的平方根。谱宽是速度色散的量度,即分辨率体积内的剪切或湍流。
,为归一化谱的二阶矩的平方根。谱宽是速度色散的量度,即分辨率体积内的剪切或湍流。
[sigmav_bias, sigmav_std] = helperDataQuality (nexrad_aoi、时刻、范围、方位、'sigmav');
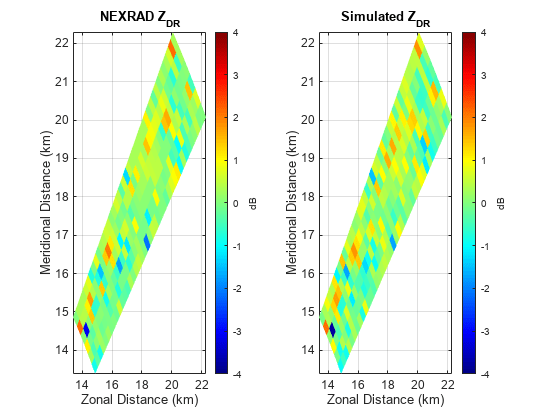
差分反射率
微分反射率, ,由水平极化信号和垂直极化信号的功率估计值的比值来估计。微分反射率在水流星分类中是有用的。
,由水平极化信号和垂直极化信号的功率估计值的比值来估计。微分反射率在水流星分类中是有用的。
[ZDR_bias, ZDR_std] = helperDataQuality (nexrad_aoi、时刻、范围、方位、“ZDR”);

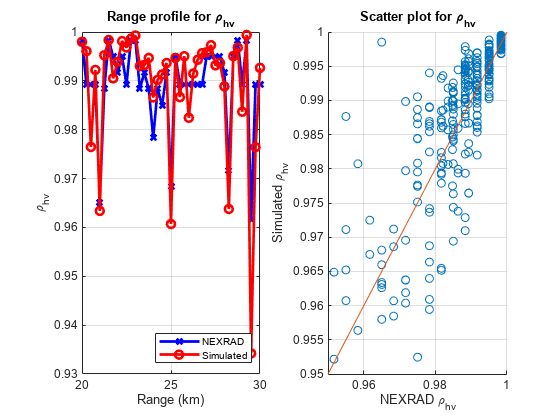
相关系数
相关系数, ,表示在水平和垂直返回的功率和相位对每个脉冲的一致性。相关系数在决定系统性能和分类雷达回波类型中起重要作用。
,表示在水平和垂直返回的功率和相位对每个脉冲的一致性。相关系数在决定系统性能和分类雷达回波类型中起重要作用。
[Rhohv_bias, Rhohv_std] = helperDataQuality (nexrad_aoi、时刻、范围、方位、'Rhohv');

微分相位
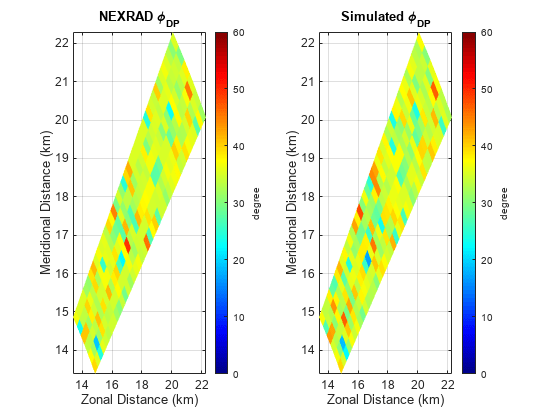
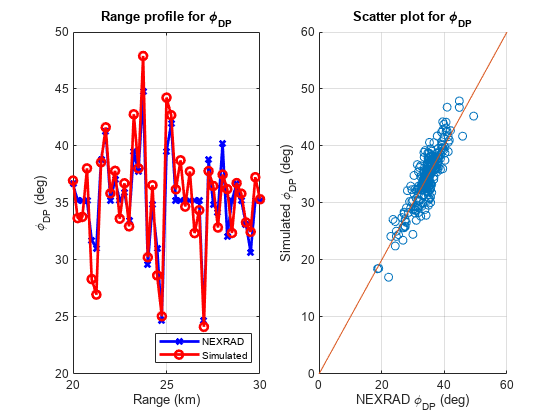
差分相位, 是从水平和垂直偏振返回的脉冲的相位延迟的差异。微分相位提供正在采样的散射体的性质的信息。
是从水平和垂直偏振返回的脉冲的相位延迟的差异。微分相位提供正在采样的散射体的性质的信息。
[Phidp_bias, Phidp_std] = helperDataQuality (nexrad_aoi、时刻、范围、方位、'Phidp');
错误统计
前一节中的图提供了模拟质量的可视化定性度量。这个例子的这一部分显示了与NEXRAD规范的估计作为误差统计的定量比较。
MomentName = {“Z”;“虚拟现实”;'sigmav';“ZDR”;'Rhohv';'Phidp'};STDEV = [轮(Z_std,2);圆形(Vr_std,2);圆形(sigmav_std,2);圆形(ZDR_std,2);圆形(Rhohv_std,3);圆形(Phidp_std,2)];规格= [1; 1; 1; 0.2; 0.01; 2];单元= {'D b';“米/秒”;“米/秒”;'D b';'';“度”};T =表(MomentName、方差、规格、单位);disp (T);
MomentName方差规格单位 __________ _____ _____ __________ {' Z '} 0.5 1{“分贝”}{“虚拟现实”}0.01 - 1{“米/秒”}{‘sigmav} 0.14 - 1{“米/秒”}{‘ZDR} 0.06 - 0.2{“分贝”}{‘Rhohv} 0.006 - 0.01 {0 x0 char}{‘Phidp} 0.16 - 2{‘度’}
经比较,所有雷达矩估计均满足NEXRAD规范,数据质量良好。
总结
这个例子演示了如何模拟偏振多普勒雷达从分布天气目标区域的返回。目视比较和误差统计表明,估计的雷达矩符合NEXRAD地面真值规范。通过这个示例,您可以在其他应用程序中进一步探索模拟的时间序列数据,如天气雷达的波形设计、系统性能研究和数据质量评估。
参考文献
[1] Doviak,R和D Zrnic。多普勒雷达和天气观测,第2版。纽约:多佛,2006年。
[2]章,G.天气雷达旋光。博卡拉顿:CRC出版社,2016年
[3] Li, Z, S. Perera, Y. Zhang, G. Zhang, R. Doviak。多功能阵列雷达天气测量时域系统建模及应用。2018 IEEE雷达会议(RadarConf18)俄克拉荷马市,OK, 2018年,第1049-1054页。
你也可以从以下列表中选择一个网站: