星载合成孔径雷达的性能预测
这个例子展示了如何评估性能的星载合成孔径雷达(SAR)和比较理论极限与实现SAR系统的要求。SAR使用雷达天线的运动对目标地区提供更好的方位分辨率。考虑到雷达的主要参数(如工作频率、天线尺寸和带宽),平台安装在(如高度、速度、安装位置),确定性能参数如足迹、方位和距离分辨率,信号噪声比(信噪比)的SAR图像和噪声等效反射率(尼珥)。
SAR系统参数和约定
考虑一个雷达在低地球轨道(LEO)卫星操作在c波段5.5 GHz脉冲的带宽500 MHz。卫星是海拔565公里,移动速度为7.0公里/秒。雷达天线的尺寸是5.2米(方位)1.1米高。假定为0.8秒,返回处理斜视角度是90度。

%平台配置v = 7 e3;%的速度(米/秒)h = 565年e3;%的高度(米)%雷达信号配置频率= 5.5 e9;%雷达频率(赫兹)λ= freq2wavelen(频率);%波长(m)bw = 500 e6;%的带宽(赫兹)proctime = 0.8;%处理时间(s)%天线尺寸戴兹= 5.2;%在方位(m)德尔= 1.1;%在高度(米)
真正的天线波束宽度和增益
使用ap2beamwidth函数来计算实际天线波束宽度。
realAntBeamwidth = ap2beamwidth(戴兹德尔,λ)% (Az El)(度)
realAntBeamwidth =2×10.6006 - 2.8391
使用aperture2gain函数来计算天线增益。
antGain = aperture2gain(戴兹*▽,λ)% dBi
antGain = 43.8369
天线方向
抑郁症的角度通常是用来定义天线指向的方向。

地球曲率的影响
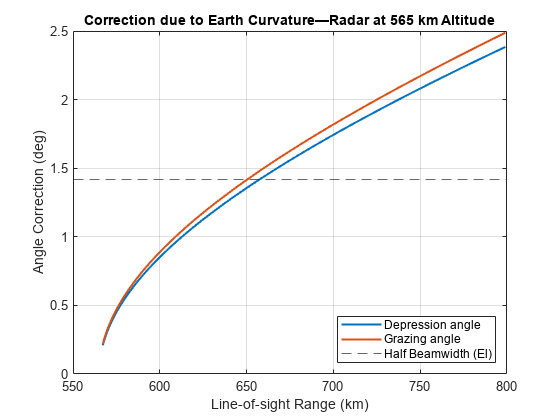
一个典型的假设对许多雷达系统是地球是平的,这样俯视角是一样的掠射角如图。
depang_flat = (45:85) ';grazang_flat = depang_flat;losrng = h /信德(depang_flat);%视线范围(米)
使用depressionang和grazingang函数计算抑郁和放牧的角度分别从视线范围内。使用球形地球模型而不是平坦地球模型,观察范围超过660公里的俯角修正波束宽度大于一半,因此它是至关重要的占地球曲率在这个场景中。
Rearth = physconst (“earthradius”);depang_sph = depressionang (h, losrng,“弯曲”,Rearth);grazang_sph = grazingang (h, losrng,“弯曲”,Rearth);情节(losrng / 1 e3, [depang_sph-depang_flat grazang_flat-grazang_sph),“线宽”,1.5)网格在;yline (realAntBeamwidth (2) / 2,“——”)%半梁宽度(高度)包含(的视线范围(公里))ylabel (“角修正(度)”)传说(“俯角”,掠射角的,“一半波束宽度(El)”,“位置”,“东南”)标题(“校正由于地球Curvature-Radar”num2str (h / 1 e3),公里高度的])
视线范围传播
雷达能量被大气折射和弯曲向地球,使雷达看到超越地平线。使用effearthradius函数模型对流层折射的影响使用的平均曲率半径的方法。自从有效地球半径等于实际的地球半径,可以得出这样的结论:对流层折射在这种情况下可以忽略不计。电离层折射是忽略了在这个场景中。
tgtHeight = 0;%光滑的地球NS = 313;%参考大气n单位Re = effearthradius (min (losrng), h, tgtHeight,“SurfaceRefractivity”、NS);%有效地球半径(米)Re / Rearth
ans = 1
剩下的这个例子中,选择一个俯视角68.96度,对应于一个掠射角67度和倾斜范围为609.4公里。
depang = depang_sph (24)
depang = 68.9629
grazang = grazang_sph (24)
grazang = 66.9953
slantrng = losrng (24)
slantrng = 6.0937 e + 05
足迹和分辨率的真实和合成孔径天线
雷达的足迹
接下来,使用计算天线轨迹aperture2swath函数。足迹是由沿地带(或距离沿着范围覆盖方向)和横向距离片(或横向距离范围的方向)。
[rangeswath, crngswath] = aperture2swath(λ,slantrng del戴兹,grazang);(“真正的天线范围足迹:”,num2str(圆(engunits (rangeswath), 1)),“公里”]
ans = '真正的天线足迹范围:32.8公里
(“真正的天线交叉范围足迹:”,num2str(圆(engunits (crngswath), 1)),“公里”]
ans =‘真正的天线交叉范围足迹:6.4公里
计算的距离地面轨迹(或卫星的最低点)雷达波束的中心在地上。注意,尽管地球曲率的影响小的足迹大小,转换梁中心位置在9.5公里的范围为给定的倾斜方向609.4公里的范围。
distgrndtrack_flat = h /罐内(grazang_flat (24);%平坦地球模型(的最低点距离中心的足迹(平坦地球模型):“,num2str(圆(engunits (distgrndtrack_flat), 1)),“公里”]
ans = '最低点距离中心的足迹(平坦地球模型):228.3公里
distgrndtrack =再保险*函数(depang-grazang);%考虑地球曲率(的最低点距离中心的足迹:,num2str(圆(engunits (distgrndtrack), 1)),“公里”]
ans = '最低点距离中心的足迹:218.8公里
足迹频率和角度变化的敏感性
分析了天线足迹频率变化的敏感性。增加雷达的工作频率降低了天线的足迹。
f =[频率/ 2 3/4 *频率频率4/3 *频率)';%在c波段操作频率(赫兹)lambdav = freq2wavelen (f);%的波长(m)[rangeswathv, crngswathv] = aperture2swath (slantrng、lambdav del戴兹,grazang);clf;plotAntennaFootprintVsFreq(频率f rangeswathv crngswathv);
接下来,修复工作频率回到5.5 GHz和分析天线足迹掠射角变化的敏感性。情节的中心的距离雷达足迹卫星地面轨迹(地面范围内)的函数角度看。正如所料,梁足迹和梁中心距离最低点掠射角增加时降低。
grazv = grazang_sph(八8:结束);%放牧角度(度)depangv = depang_sph(八8:结束);slantrngv = losrng(八8:结束);%倾斜范围在地上rangeswathv = 0(1,元素个数(grazv));crngswathv = 0(1,元素个数(grazv));distgrndtrackv =再保险*函数(depangv-grazv);为i = 1:元素个数(grazv) [rangeswathv(我),crngswathv (i)) = aperture2swath (slantrngv(我),λ,德尔·戴兹,grazv(我));结束clf;plotAntennaFootprintVsGrazAng (grazv、distgrndtrackv rangeswathv、crngswathv grazang);

实际天线分辨率
下面的距离地面的距离分辨率是不可分割的两个点目标在最终的图像。使用bw2rangeres函数计算倾斜范围解决真正的天线,这是由信号带宽决定。
slantrngres = bw2rangeres (bw)
slantrngres = 0.2998

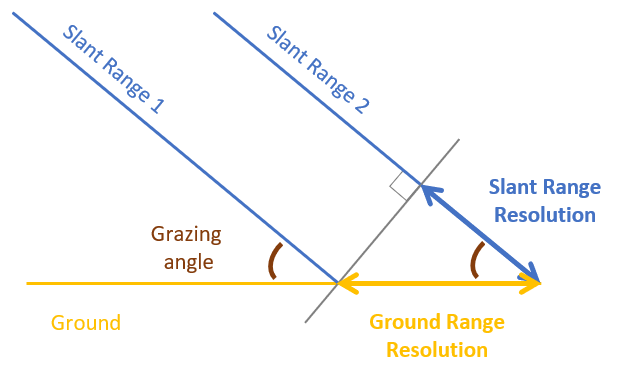
项目地平面的倾斜范围解决给定的掠射角。地面距离分辨率总是比倾斜范围的决议。两者的区别增加随着掠射角的增加。注意,横向距离分辨率和横向距离足迹一样因为没有执行信号处理来提高分辨率。这种横向距离分辨率显然是不够的。
rngres = slant2grndrangeres (slantrngres grazang);disp ([“真正的天线地面距离分辨率:”num2str(圆(rngres, 2)),“米”])
真正的天线地面距离分辨率:0.77
crngres = crngswath;disp ([“真正的天线横向距离分辨率:,num2str(圆(engunits (crngres), 1)),“公里”])
真正的天线横向距离分辨率:6.4公里
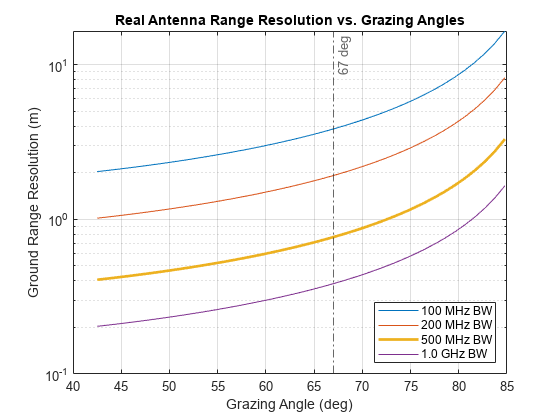
接下来,分析地面距离分辨率变化敏感性的掠射角几信号带宽。最好的高的距离分辨率达到信号带宽和低掠射角。对于一个给定的带宽,距离分辨率恶化随着掠射角的增加。在500 MHz,距离分辨率不同42厘米的掠射角45度到1.73的掠射角80度。
bwv = [100 e6 200 e6 500 e6 1 e9];%的信号带宽rngresv = 0(元素个数(grazang_sph),元素个数(bwv));为j = 1:元素个数(grazang_sph) slantrngresv = bw2rangeres (bwv);rngresv (j) = slant2grndrangeres (slantrngresv, grazang_sph (j));结束clf;l = semilogy (grazang_sph rngresv);集(l (3),“线宽”,2)网格在参照线(grazang“-”。,{[num2str(圆(grazang, 2)),“度”]});%选择掠射角包含(掠射角(度))ylabel (“地面距离分辨率(m)的)标题(“真正的天线距离分辨率和放牧的角度”)传说(“100 MHz BW”,“200 MHz BW”,“500 MHz BW”,“1.0 GHz BW”,“位置”,“东南”)
理想和有效解决合成天线
前一节介绍的范围和横向距离分辨率真实孔径雷达,下一步是使用sarlen和sarazres函数计算合成孔径长度及其横向距离或方位分辨率。注意,距离分辨率,这依赖于传输信号的带宽和掠射角不变的真实孔径雷达和一个特别行政区。
idealSyntheticApertureLength = sarlen (slantrng,λ,戴兹);%合成孔径长度(米)azResolution = sarazres(λ,slantrng idealSyntheticApertureLength);%横向距离(方位)决议(m)integrationTime = sarinttime (idealSyntheticApertureLength, v);%的理想积分时间(s)参数= [“合成孔径长度”;“距离分辨率”;“横向距离分辨率”;“集成”];IdealSAR =[圆(idealSyntheticApertureLength / 1 e3, 1); rngres;轮(azResolution 1);轮(integrationTime * 1 e3, 1)];单位= [“公里”;“m”;“m”;“女士”];idealSAR =表(参数、idealSAR单位)
idealSAR =4×3表参数IdealSAR单位___________________________ ________ _____“合成孔径长度”6.4“公里”“距离分辨率”0.76711“m”“横向距离分辨率”2.6“m”“集成”1095.9“女士”
使用最好的横向距离分辨率SAR在这种情况下是2.6米。相比这是一个相当大的改进6.4公里的横向距离分辨率的天线。然而,为了实现这一性能,脉冲需要集成了1.1秒。系统分析在这个例子中指定一个积分时间只有800 ms。这影响了有效的横向距离分辨率的雷达。
effSyntheticApertureLength = sarlen (v, proctime);%考虑处理时间约束effAzResolution = sarazres(λ,slantrng effSyntheticApertureLength);%有效方位分辨率(m)RealAntenna =[南;rngres;轮(crngres);南);EffectiveSAR =[圆(effSyntheticApertureLength / 1 e3, 1); rngres;轮(effAzResolution 1);轮(proctime * 1 e3, 1)];sar =表(参数、RealAntenna IdealSAR EffectiveSAR,单位)
sar =4×5表参数RealAntenna IdealSAR EffectiveSAR单位___________________________ ___________ ________ _______ _____“合成孔径长度”南6.4 - 5.6“公里”“距离分辨率0.76711 0.76711 0.76711“m”“横向距离分辨率”6388 2.6 - 3“m”“集成”南800 - 1095.9“女士”
通过集成脉冲只800 ms,合成孔径长度相比减少了800的理想情况下,横向距离分辨率是减少0.4米到3.0米。因为数据处理在小于1.11年代,梁内的雷达可以保持目标足迹长度的计算。
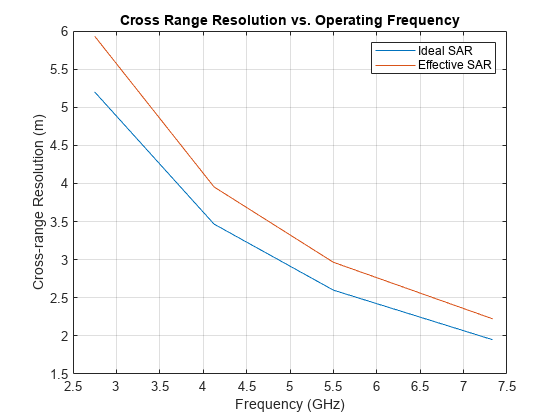
接下来,分析了横向距离分辨率频率变化的敏感性。横向距离分辨率提高了在更高的频率。
azresv = sarazres (lambdav slantrng idealSyntheticApertureLength);effazresv = sarazres (lambdav slantrng effSyntheticApertureLength);情节([f] / 1 e9 [azresv (:) effazresv(:)))网格在传奇(“理想的特区”,“有效的特区”)包含(“频率(GHz)”)ylabel (“横向距离分辨率(m)”)标题(“横向距离分辨率与工作频率”)
范围和横向距离模棱两可的SAR图像
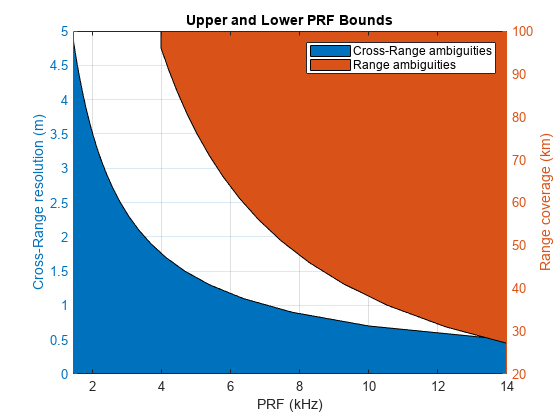
覆盖(片长度)和分辨率不能自主选择他们都强加限制脉冲重复频率(脉冲)。如果PRF设置太低,雷达患有光栅叶和多普勒(或横向距离)模棱两可。如果PRF设置过高,测量范围是模棱两可的。掠射角也会影响脉冲重复频率的选择,因为它影响天线的足迹在前一节。
上、下脉冲重复频率范围
使用sarprfbounds函数来确定各种保险范围的最小和最大脉冲重复频率值(足迹)和横向距离分辨率的卫星速度和掠射角。金宝搏官方网站
desiredCRngRes = (0.5:0.2:5);% mdesiredRngCov = (16 e3:5e3:100e3);% m[prfminv, prfmaxv] = sarprfbounds (v, desiredCRngRes, desiredRngCov grazang);clf plotPRFbounds (prfminv desiredCRngRes、prfmaxv desiredRngCov);
脉冲重复频率的选择,以避免鬼图片
PRF通常是可编程的,可以为每个任务优化。使用sarprf函数来计算基于卫星的雷达脉冲重复频率的速度和真正的天线尺寸以及方位。指定一个常数碾轧因素作为一个安全裕度,以防止mainlobe返回脉冲重复频率混叠的间隔。
脉冲重复频率= sarprf (v,戴兹,的滚边,1.5)
脉冲重复频率= 4.0385 e + 03
选中的脉冲重复频率脉冲重复频率范围内。SAR的运动平台内的脉冲重复间隔(PRI) 1.73米。
t = 1 /脉冲重复频率;distpri = sarlen (v, t)%距离卫星在一个革命制度党所感动
distpri = 1.7333
光栅叶分析
现在的合成阵列模型phased.ula系统元素对象使用的有效孔径长度和间距。
sarArray = phased.ULA (“NumElements”装天花板(effSyntheticApertureLength / distpri) + 1,“ElementSpacing”,distpri);distpri /λ
ans = 31.7998
注意,元素间距超过31.8倍波长的雷达光栅叶。回想一下,真正的天线方位波束宽度是0.6度。模型天线响应作为一个高度方向余弦模式相同的波束宽度。
realAnt = phased.CosineAntennaElement (“FrequencyRange”,(freq-bw / 2频率+ bw / 2),“CosinePower”26日,e3);realAntBeamwidth (1)
ans = 0.6006
b =波束宽度(realAnt、频率)
b = 0.6000
情节模式的反应合成阵列和真正的天线来验证数组的第一栅瓣位于零的天线模式,所以雷达光栅叶不受负面影响。
clf plotResponse (sarArray频率,physconst (“光速”),“RespCut”,“阿兹”,“AzimuthAngles”(3:0.005:3));持有在plotResponse (realAnt,频率,“RespCut”,“阿兹”,“AzimuthAngles”(3:0.005:3));持有从传奇(“合成阵列响应”,“真正的天线响应”,“位置”,“西北”)标题(”)%的注释xl =参照线(1.8,“-”。,{“第一栅瓣”});xl。LabelVerticalAlignment =“高级”;xl。LabelHorizontalAlignment =“左”;
SAR图像信噪比和噪声等效反射率
下一节探讨不同因素用于SAR方程来计算图像信噪比。首先,分析目标(或表面)雷达截面(RCS)和雨杂乱(或体积)RCS。
表面粗糙度对频率、极化和掠射角
使用landreflectivity函数计算反射率或规范化的雷达截面(nrc)对于一个给定的掠射角和操作频率。在地上目标RCS计算图像平面使用sarSurfaceRCS函数考虑到雷达分辨率。在一般情况下,SAR图像的亮度区域对应于表面的粗糙度山脉出现比平地由于其较高的RCS。粗糙度测量对波长出现表面粗糙的在一个频率和光滑。同时,注意RCS增加随着掠射角的增加。
fsub = (2.5 e9 5.5 e9 7.5 e9);%赫兹grazv = 10:5:85;%度landtype = [“山”,“平地”];tgtrcsv = 0(元素个数(grazv),元素个数(fsub),元素个数(landtype));为k = 1:元素个数(landtype)%的土地类型与不同的粗糙度为j = 1:元素个数(fsub)%的频率为u = 1:元素个数(grazv)%放牧的角度nrcsv = landreflectivity (landtype (k), grazv (u), fsub (j));tgtrcsv (u, j, k) = sarSurfaceRCS (nrcsv, [slantrngres effAzResolution], grazv (u));结束结束结束plotTargetRCSvsGrazAng (grazv tgtrcsv、landtype fsub)

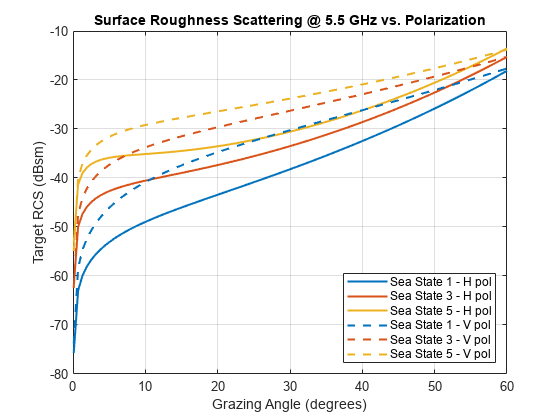
RCS还取决于的偏振雷达。使用seareflectivity函数分析了极化效应在海洋表面反射率不同海面粗糙度(即海洋状态)。注意,有更多的大海RCS的变化在低角度和放牧的RCS水平极化信号低于垂直偏振信号相同的海况对放牧角度60度以下。这个数字还表明,偏振减少之间的差异随着掠射角的增加从10到60度。
波尔= [“H”,“V”];seaStates = [1 3 5];grazvpol = linspace (0.1, 70100);%掠射角(度)tgtrcsv = 0(元素个数(grazvpol),元素个数(pol),元素个数(seaStates));为n = 1:元素个数(seaStates)%海州为j = 1:元素个数(pol)%偏振为u = 1:元素个数(grazvpol)%放牧的角度nrcsv = seareflectivity (seaStates (n), grazvpol (u),频率,“极化”波尔(j));%计算RCS正常化tgtrcsv (u, j, n) = sarSurfaceRCS (nrcsv, [slantrngres effAzResolution], grazvpol (u));结束结束结束plotTargetRCSvsPol (grazvpol tgtrcsv seaStates,波尔,频率)

雨反射率和Signal-to-Clutter比(SCR)
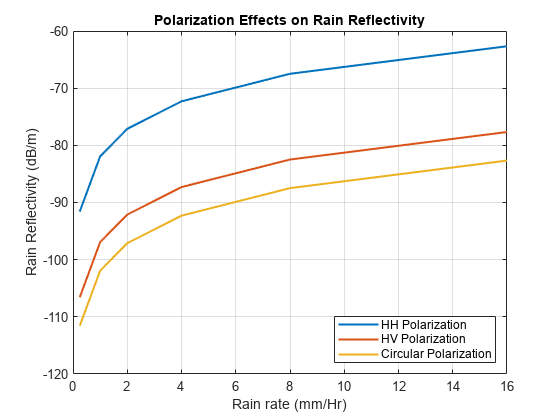
竞争回声干扰来源如下雨可以导致SAR图像退化。雨落在附近的目标场景杂波的图像场景。使用rainreflectivity函数来分析雨下的反射率不同雨率和偏振。观察到雨反射率比圆偏振高线性偏振,随雨率。
rainRate = (0.25 - 1 2 4 8 16);波尔= [“HH”,“高压”,“RCPRCP”];rainrefl = 0(元素个数(rainRate),元素个数(pol));为i = 1:元素个数(pol) rainrefl(:,我)= rainreflectivity(频率、rainRate波尔(i));% 5.5 GHz的操作频率结束情节(rainRate pow2db (rainrefl),“线宽”,1.5)网格在包含(“雨速度(毫米/小时)”)ylabel (“雨反射率(dB /米)”)标题(“雨反射率极化效应”)传说(“HH极化”,“高压极化”,圆偏振的,“位置”,“东南”);
接下来,使用clutterVolumeRCS雨RCS计算的函数,它被定义为雷达三维分辨单元(倾斜范围、方位角和仰角的分辨率)。使用rainscr函数来计算信号能量的比值从目标场景的分辨单元的能量雨返回加工成同一目标场景的分辨单元(或雨可控硅)。验证signal-to-clutter比率仍然高于20分贝,对所有雨率目标包括弱的RCS,如光滑的土地。因此,这个例子不希望雨是一个限制因素雷达在这个配置。
elbeamw = realAntBeamwidth (2);%雷达仰角波束宽度maxRainHeight = 4000;% mrhoe = rainelres (slantrng elbeamw、grazang maxRainHeight);%海拔决议res = [slantrngres effAzResolution rhoe];rrc = clutterVolumeRCS (rainrefl (: 1), res);%雨RCS HH极化landType = [“山林”,“农场”,“顺利”];可控硅= 0(元素个数(rainRate),元素个数(landType));tgtrcs = 0(元素个数(landType), 1);为j = 1:元素个数(landType) nrcsv (j) = landreflectivity (landType (j), grazang,频率);%计算光滑的土地没有植被的规范化的RCStgtrcs (j) = sarSurfaceRCS (nrcsv (j), [slantrngres effAzResolution], grazang);可控硅(:,j) = rainscr(λ,rrc tgtrcs (j), proctime) ';%信号雨杂波比结束plotRainSCR (rrc rainRate,可控硅,landType)
SAR方程
估计信噪比(信噪比)在雷达接收机使用信噪比形式的雷达方程。首先,模型和估计得失的不同来源的雷达系统和它的环境。
处理收益
使用matchinggain函数计算处理增益范围由于噪声带宽减少匹配滤波器。
d = 0.1;% 10%工作周期pw =(1 /脉冲重复频率)* d;%有效脉冲宽度(s)bw rnggain = matchinggain (pw)%范围处理增益(dB)
rnggain = 40.9275
使用sarazgain函数计算方位处理增益由于相干脉冲的集成。
azgain = sarazgain (effAzResolution slantrngλ,v,脉冲重复频率)%方位处理增益(dB)
azgain = 35.0931
损失和噪声系数
使用noisefigure函数来估计噪声的级联接收器阶段。假设七阶段以下值:
第一阶段采用:图= 1.0分贝噪音,获得= 15.0
第二阶段射频滤波器:图= 0.5分贝噪音,获得= -0.5
第三阶段混合器:图= 5.0分贝噪音,获得= -7.0
第四阶段如果过滤器:图= 1.0分贝噪音,获得= -1.0
第五阶段如果前置放大器:图= 0.6分贝噪音,获得= 15.0
阶段6如果阶段:图= 1.0分贝噪音,获得= 20.0
阶段7阶段探测器:图= 6.0分贝噪音,获得= -5.0
nf = (1.0, 0.5, 5.0, 1.0, 0.6, 1.0, 6.0);% dBg = (15.0, -0.5, -7.0, -1.0, 15.0, 20.0, -5.0);% dBcnf = noisefigure (nf, g)
cnf = 1.5252
使用radarpropfactor函数计算单向雷达传播因素在光滑的土地。
[hgtsd, beta0 vegType] = landroughness (“顺利”);tgtheight = hgtsd;Re = effearthradius (slantrng h, tgtheight);propf = radarpropfactor (slantrng、频率、h、tgtheight“EffectiveEarthradius”再保险,“TiltAngle”grazang,“ElevationBeamwidth”elbeamw,…“SurfaceHeightStandardDeviation”hgtsd,“SurfaceSlope”beta0,“VegetationType”vegType)
propf = -5.3980 e-05
使用tropopl函数来计算大气气体吸收损失。
atmoLoss = tropopl (slantrng频率、tgtheight grazang)
atmoLoss = 0.0439
使用rainpl函数计算损失雨根据ITU模型。或者,您可以使用cranerainpl根据起重机模型函数进行计算。
频率,rainLoss = rainpl (slantrng rainRate(结束),grazang)
rainLoss = 0.5389
使用radareqsarsnr函数来计算图像信噪比与SAR雷达方程。假设5千瓦的峰值功率。您还可以指定额外损失和因素包括方位波束形状损失,窗口损失,传输损耗,和接收线损失。估计的光束形状的损失beamloss功能和使用5 dB为所有其他固定损失的总和。对于这一分析,指定landType为“光滑的“用最弱的土地的目标。至少10 dB的图像信噪比通常是被视为足以提供一个良好的图像质量,所以在35.9 dB这个目标系统有足够的利润。
磅= beamloss;customLoss = 5;% dBPt = 5 e3;%峰值功率(W)sntemp = systemp (cnf);%噪声温度imgsnr = radareqsarsnr (slantrng,λ,Pt、pw rnggain, azgain,“获得”antGain,RCS的tgtrcs (3),…“AtmosphericLoss”atmoLoss,“损失”,cnf + rainLoss,“PropagationFactor”propf,…“t”sntemp,“CustomFactor”-Lb-customLoss)
imgsnr = 35.9554
噪声等效反射率(尼珥或NEZ0)
最后,使用sarnoiserefl函数计算尼珥的雷达和分析其对频率变化的敏感性。尼珥是最小的分布式杂波中可以看到,接收机噪声的存在对于一个给定的表面反射率。这是一个测量雷达空间分布式噪声的敏感性。顺利在这个计算地形,尼珥- - - - - -62.6 dB为5.5。GHz,它随频率。
neq = sarnoiserefl (f,频率、imgsnr nrcsv (3));clf;情节(f / 1 e9 neq,“线宽”,1.5)网格在参照线(5.5,“——”)包含(“频率(GHz)”)ylabel (“噪声等效反射率(dB)”)标题(“平滑地形- - - - - -”num2str(圆(effAzResolution, 1)),“m分辨率”])

总结
这个例子展示了如何估计性能参数如覆盖、星载SAR系统的分辨率和信噪比。首先,你确定上、下脉冲重复频率范围以避免鬼图片。然后分析目标和雨杂乱RCS对不同偏振和放牧的角。然后估计处理雷达及其环境损益。最后,您使用SAR方程来计算图像信噪比和尼珥。
引用
Doerry,阿明沃尔特。“合成孔径雷达的性能限制。“桑迪亚国家实验室,2006年2月1日。
O ' donnell罗伯特。“雷达系统工程。”IEEE航空航天和电子系统协会,新罕布什尔州和IEEE部分,2013年。
金宝app支持功能
slant2grndrangeres
函数grndres = slant2grndrangeres(单反,grazang)% slant2grndrangeres斜距离分辨率转换成地面距离分辨率grndres = slres. / cosd (grazang);结束
plotAntennaFootprintVsFreq
函数t = plotAntennaFootprintVsFreq(频率f rangeswathv crngswathv) t = tiledlayout (1、2);nexttile%绘制横向距离和范围theta_grid = linspace(0, 2 *π)';semix = 0.5 * rangeswathv / 1 e3;%公里semiy = 0.5 * crngswathv / 1 e3;%公里l =情节(cos (theta_grid) * semix sin (theta_grid) * semiy);集(l (3),“线宽”1.5)ylim (xlim)网格在包含(”地带(公里))ylabel (的横向距离(公里)的狭长)([num2str传奇(圆(f (1) / 1 e9, 1))“GHz”]、[num2str(圆(f (2) / 1 e9, 1))“GHz”),…[num2str(圆(f (3) / 1 e9, 1))“GHz”]、[num2str(圆(f (4) / 1 e9, 1))“GHz”])nexttile%的阴谋片长度和操作频率情节([f] / 1 e9 [rangeswathv (:) crngswathv (:)) / 1 e3) xl =参照线(频率/ 1 e9,“-”。,{[num2str(频率/ 1 e9),“GHz”)},“颜色”l (3) .Color);%注释xl。LabelVerticalAlignment =“高级”;xl。LabelHorizontalAlignment =“左”;xl。线宽= 1.5;网格在包含(“频率(GHz)”)ylabel (片的长度(公里))传说(“沿着范围”,“交叉范围”)标题(t)“真正的天线足迹与操作频率”)结束
plotAntennaFootprintVsGrazAng
函数t = plotAntennaFootprintVsGrazAng (grazv distgrndtrackv、rangeswathv crngswathv, grazang) t = tiledlayout (1、2);nexttile%情节足迹和梁中心距地面轨迹theta_grid = linspace(0, 2 *π)';semix = 0.5 * rangeswathv / 1 e3;%公里semiy = 0.5 * crngswathv / 1 e3;%公里l =情节(cos (theta_grid) * semix, 1 e - 3 * distgrndtrackv(:)”+罪(theta_grid) * semiy);集(l (3),“线宽”,1.5)网格在包含(”地带(公里))ylabel (的地面距离(公里))([num2str传奇(圆(grazv (1), 2))“度掠射角的),…[num2str(圆(grazv (2), 2))“度掠射角的),…[num2str(圆(grazv (3), 2))“度掠射角的),…[num2str(圆(grazv (4), 2))“度掠射角的),…[num2str(圆(grazv (5), 2))“度掠射角的),…“位置”,“northoutside”)轴垫nexttile%绘制梁中心距离地面轨迹与放牧角度情节(e3 grazv distgrndtrackv / 1) xl =参照线(grazang,“-”。,{[num2str(圆(grazang, 2)),“度”)},“颜色”l (3) .Color);%注释xl。LabelVerticalAlignment =“高级”;xl。LabelHorizontalAlignment =“左”;xl。线宽= 1.5;网格在包含(掠射角(度))ylabel (的地面距离(公里))副标题(“梁中心距最低点”)标题(t)“真实的天线足迹与放牧角”)结束
plotPRFbounds
函数plotPRFbounds (prfminv desiredCRngRes、prfmaxv desiredRngCov) yyaxis左填充([prfminv (1) / 1 e3; prfminv (:) / 1 e3; prfminv(结束)/ 1 e3], [0; desiredCRngRes(:); 0],[0 0.4470 - 0.7410])网格在包含(脉冲重复频率(赫兹)”)ylabel (“横向距离分辨率(m)”)yyaxis正确的填充([prfmaxv (1) / 1 e3; prfmaxv (:) / 1 e3; prfmaxv(结束)/ 1 e3], [100; desiredRngCov (:) / 1 e3; 100], [0.8500 0.3250 0.0980]) xlim ([prfminv(结束)/ 1 e3 prfminv (1) / 1 e3]) ylabel (的覆盖范围(公里))传说(横向距离模棱两可的,范围模棱两可的)标题(上、下脉冲重复频率范围的)结束
plotTargetRCSvsGrazAng
函数plotTargetRCSvsGrazAng (grazv tgtrcsv、landtype fsub)情节(grazv, pow2db (tgtrcsv (:,: 1)),“线宽”甘氨胆酸,1.5)集(,“ColorOrderIndex”,1)在情节(grazv pow2db (tgtrcsv (:,: 2)),“——”,“线宽”,1.5)从网格在轴垫包含(掠射角(度))ylabel (“目标RCS (dBsm)”)标题(“表面粗糙度散射”)传说((char (landtype (1))“@”num2str(圆(fsub (1) / 1 e9, 1))“GHz”),…(char (landtype (1))“@”num2str(圆(fsub (2) / 1 e9, 1))“GHz”]、[char (landtype (1))“@”num2str(圆(fsub (3) / 1 e9, 1))“GHz”),…(char (landtype (2))“@”num2str(圆(fsub (1) / 1 e9, 1))“GHz”]、[char (landtype (2))“@”num2str(圆(fsub (2) / 1 e9, 1))“GHz”),…(char (landtype (2))“@”num2str(圆(fsub (3) / 1 e9, 1))“GHz”),“位置”,“西北”)结束
plotTargetRCSvsPol
函数plotTargetRCSvsPol (grazvpol tgtrcsv seaStates,波尔,频率)情节(grazvpol, pow2db(挤压(tgtrcsv (: 1:))),“线宽”甘氨胆酸,1.5)集(,“ColorOrderIndex”,1)在情节(grazvpol pow2db(挤压(tgtrcsv (:, 2:))),“——”,“线宽”,1.5)从网格在包含(掠射角(度))ylabel (“目标RCS (dBsm)”)标题(“表面粗糙度散射@”num2str(圆(频率/ 1 e9, 1))“GHz与极化”])传说([“海洋国家”num2str (seaStates (1))“- - -”char(波尔(1))“波尔”),…(“海洋国家”num2str (seaStates (2))“- - -”char(波尔(1))“波尔”),…(“海洋国家”num2str (seaStates (3))“- - -”char(波尔(1))“波尔”),…(“海洋国家”num2str (seaStates (1))“- - -”char(波尔(2))“波尔”),…(“海洋国家”num2str (seaStates (2))“- - -”char(波尔(2))“波尔”),…(“海洋国家”num2str (seaStates (3))“- - -”char(波尔(2))“波尔”),“位置”,“东南”)结束
plotRainSCR
函数plotRainSCR (rrc rainRate,可控硅,landType) t = tiledlayout (1、2);nexttile%的阴谋雨RCS vs雨率情节(rainRate pow2db (rrc),“线宽”,1.5)网格在包含(“雨速度(毫米/小时)”)ylabel (“雨RCS (dBsm)”)传说(“HH极化”)nexttile%情节signal-to-clutter比(SCR)与降雨率情节(rainRate、可控硅、“线宽”,1.5)网格在包含(“雨速度(毫米/小时)”)ylabel (“Signal-to-Clutter比率(dB)”)传说(landType (1), landType (2), landType(3)标题(t)“雨杂波”)结束