合成孔径雷达(SAR)图像形成
这个例子展示了如何使用线性调频(LFM)波形对基于条带图的合成孔径雷达(SAR)系统进行建模。SAR是一种侧视机载雷达,其可实现的横向距离分辨率远高于实际孔径雷达。使用SAR生成的图像有其自身的优势,主要与使用主动传感器(雷达)相比,传统成像系统使用被动传感器(相机),依赖环境照明来获取图像。由于使用了主动传感器,该系统可提供全天候性能,无论雪、雾或雨等天气。此外,配置系统工作在不同的频率,如L-, S-或c -波段,可以根据不同的渗透深度分析地面上的不同层。由于SAR的分辨率取决于信号和天线配置,因此分辨率可以比基于视觉的成像系统高得多。使用条带映射模式,本示例执行距离迁移算法[1]和近似形式的反投影算法[2]对静止目标成像。为了降低计算复杂度,选择了反投影算法的近似形式,如[3]所示。线性调频波形在相当低的发射功率下提供了大的时间带宽产品的优势,使其适合在机载系统中使用。
合成孔径雷达成像
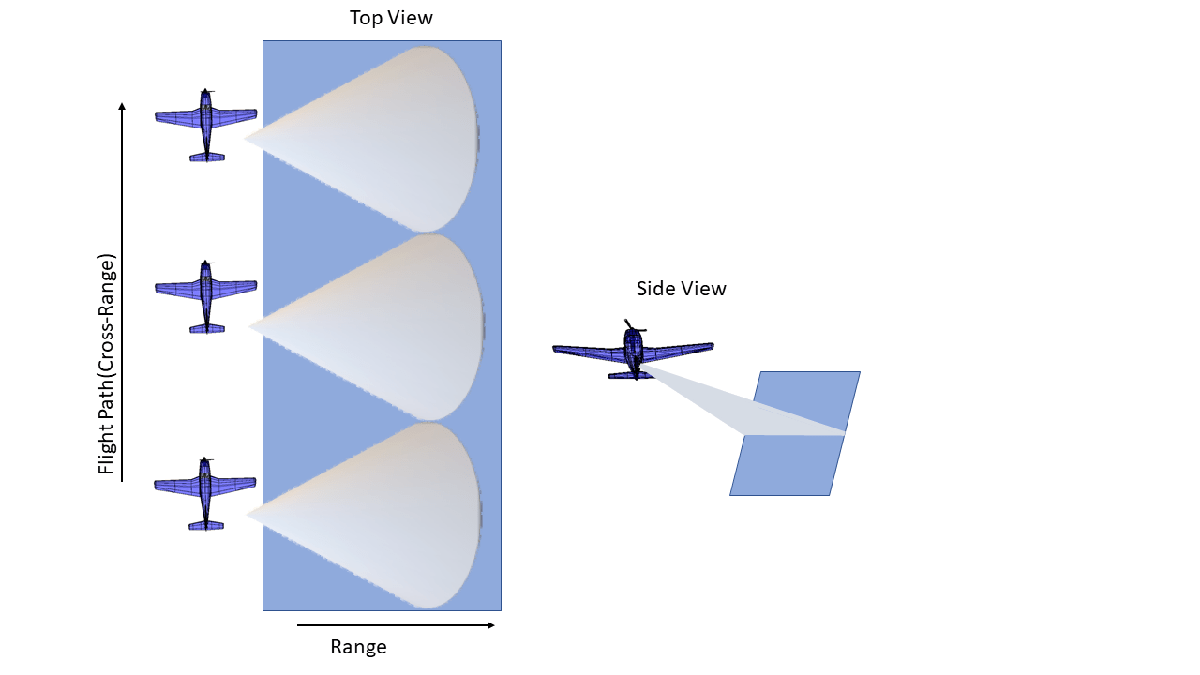
SAR生成二维(2-D)图像。飞行方向称为横向距离或方位角方向。天线的轴向(宽侧)方向与飞行路径正交,称为交叉轨迹或距离方向。这两个方向为在数据采集窗口持续时间内从天线波束宽度范围内生成图像所需的尺寸提供了依据。交叉道方向是脉冲传输的方向。这个方向提供了沿飞行路径对目标的倾斜范围。然后必须对每个脉冲从目标反射后收到的能量进行处理(用于距离测量和分辨率)。交叉距离或方位角方向是飞行路径的方向,在这个方向上处理整个飞行路径上接收到的脉冲集合以实现所需的测量和分辨率是有意义的。在两个方向上的正确聚焦意味着在距离和交叉距离方向上成功地生成图像。要求天线波束宽度足够宽,以便当平台沿其轨迹移动时,波束能长时间照射目标。 This will help provide more phase information. The key terms frequently encountered when working with SAR are:
横距(方位角):这个参数定义了雷达平台沿飞行路径的距离。
距离:这个参数定义了垂直于雷达平台飞行路径的距离。
快速时间:该参数定义每个脉冲操作的时间持续时间。
Slow-time:该参数定义了跨范围的时间信息。慢时间通常定义脉冲沿飞行路径传输的时间实例。
雷达的配置
假设一个SAR雷达工作在c波段,载波频率为4 GHz,信号带宽为50 MHz。这个带宽产生了3米的范围分辨率。雷达系统采集与平台运动方向正交的数据,如图所示。所接收的信号是所发送信号的延迟复制。延迟通常对应于目标和平台之间的倾斜距离。对于SAR系统,当平台穿过与天线波束方向正交的路径时,倾斜距离将随时间而变化。下面这一节的重点是定义传输波形的参数。LFM扫描带宽可以根据所需的范围分辨率来决定。
设定光速的物理常数。
c = physconst (“光速”);
设置SAR中心频率。
fc = 4 e9;
设置所需的范围和横向范围分辨率为3米。
rangeResolution = 3;crossRangeResolution = 3;
信号带宽是由所需的距离分辨率得到的参数。
bw = c / (2 * rangeResolution);
在SAR系统中,PRF具有双重含义。PRF不仅决定了最大无歧义范围,而且作为交叉距离方向上的采样频率。如果PRF太低而不能达到更高的无歧义范围,则会有更长的脉冲持续时间,从而导致特定区域的脉冲更少。同时,如果PRF过高,可以实现交叉距离采样,但以缩小距离为代价。因此,PRF应小于多普勒频率的两倍,并应满足最大无歧义距离的标准
脉冲重复频率= 1000;孔径= 4;兼总经理= 3 * 10 ^ 6;fs = 120 * 10 ^ 6;
配置雷达LFM信号。
波形=分阶段。LinearFMWaveform (“SampleRate”fs,“脉冲宽度”一系列问题,脉冲重复频率的脉冲重复频率,...“SweepBandwidth”bw);
假设飞行器的速度为100m /s,飞行时间为4秒。
速度= 100;flightDuration = 4;radarPlatform =分阶段。平台(“InitialPosition”(0, -200, 500),“速度”, (0;速度;0]);放慢速度= 1 /脉冲重复频率;num脉冲= flightDuration/slowTime +1;maxRange = 2500;truncrangesamples =装天花板((2 * maxRange / c) * fs);fastTime = (0:1 / fs:(truncrangesamples-1) / fs);%设置交叉范围处理的参考范围。Rc = 1000;
配置SAR收发机。天线在与飞行方向正交的侧面方向上观察。
天线=分阶段。CosineAntennaElement (“FrequencyRange”[1 e9 6 e9]);antennaGain = aperture2gain(孔径、c / fc);发射机=分阶段。发射机(“PeakPower”, 50 e3,“获得”, antennaGain);散热器=分阶段。散热器(“传感器”、天线、“OperatingFrequency”足球俱乐部,“PropagationSpeed”c);收集器=分阶段。收集器(“传感器”、天线、“PropagationSpeed”c“OperatingFrequency”、fc);接收机=分阶段。ReceiverPreamp (“SampleRate”fs,“NoiseFigure”, 30);
配置传播通道。
频道=分阶段。空闲空间(“PropagationSpeed”c“OperatingFrequency”足球俱乐部,“SampleRate”fs,...“TwoWayPropagation”,真正的);
现场配置
在本例中,在下面指定的位置配置了三个静态点目标。所有目标的平均RCS值为1米平方。
targetpos =[800 0 0; 1000年,0,0;1300年,0,0];targetvel = [0, 0, 0, 0, 0, 0;0, 0, 0) ';=阶段性目标。RadarTarget (“OperatingFrequency”足球俱乐部,“MeanRCS”, 1, 1, 1);pointTargets =分阶段。平台(“InitialPosition”targetpos,“速度”, targetvel);下图描述了基于目标的地面真相%的位置。图(1);h =轴;情节(targetpos (2, 1), targetpos (1, 1),“* g”);所有;情节(targetpos (2, 2), targetpos(1、2),“* r”);所有;情节(targetpos(2、3),targetpos(1、3)‘* b”);从;集(h,“Ydir”,“反向”); xlim (-10 [10]); ylim (1500 [700]);标题(“地面实况”); ylabel (“范围”),包含(“横向距离”);

SAR信号仿真
下面的部分描述了基于上述配置的系统如何运行。具体来说,下面一节将展示如何针对SAR平台执行数据收集。当平台在横向距离方向移动时,脉冲在与飞行路径正交的方向发射和接收。脉冲的集合给出了当平台移动时位于照明区域的目标的相位历史。目标在光照区域的距离越长,整个图像的交叉距离分辨率越好,因为距离和交叉距离聚焦的过程对整个场景进行了推广。
定义侧面角度refangle = 0(1、大小(targetpos 2));rxsig = 0 (truncrangesamples numpulses);为2 = 1: numpulses更新雷达平台和目标位置[radarpos, radarvel] = radarPlatform(slowTime);[targetpos, targetvel] = pointTargets(放慢速度);获得目标点的距离和角度[targetRange, targetAngle] = rangeangle(targetpos, radarpos);%产生LFM脉冲sig =波形();只使用能覆盖目标的脉冲长度。团体=团体(1:truncrangesamples);%发送脉冲sig =发射机(团体);%定义波束在方位角方向没有倾斜: targetAngle (1) = refangle;向目标发射脉冲sig =散热器(sig, targetAngle);将脉冲传播到自由空间中的点目标Sig =信道(Sig, radarpos, targetpos, radar, targetvel);将脉冲反射出目标sig =目标(团体);%在天线处收集反射脉冲sig =收集器(sig, targetAngle);%接收信号rxsig(:,(二)=接收机(团体);结束
想象接收到的信号。
现在可以将接收到的信号可视化为在横向距离方向上发射的多个脉冲的集合。图中显示了三个目标的真实信号部分。可以清楚地看到范围和跨范围的啁啾声。目标响应可以看作是重叠的,因为脉宽被保持更长,以保持平均功率。
显示亮度图像(真实(rxsig))、标题(SAR原始数据的)包含(“横向距离样本”) ylabel (的范围的样品)

执行范围压缩。
接收信号的每一行都包含了来自每个脉冲的所有信息,可以通过匹配滤波得到去啁啾/范围压缩信号。
pulseCompression =分阶段。RangeResponse (“RangeMethod”,匹配滤波器的,“PropagationSpeed”c“SampleRate”fs);matchingCoeff = getMatchedFilter(波形);[cdata, rngrid] = pulseccompression (rxsig, matchingCoeff);
下图显示了对接收信号进行匹配滤波后的响应。三个目标的相位历史沿横向距离方向清晰可见,实现了距离聚焦。
显示亮度图像(真实(cdata))、标题(“SAR距离压缩数据”)包含(“横向距离样本”) ylabel (的范围的样品)

方位压缩
对交叉距离数据进行处理,并在距离压缩后从SAR原始数据得到最终图像的方法有多种。从本质上讲,距离压缩有助于实现快速时间或距离方向的分辨率,而交叉距离方向的分辨率是通过方位角或交叉距离压缩实现的。这两种技术是距离迁移算法和反投影算法,在这个例子中已经演示。
rma_processed = helperRangeMigration (cdata, fastTime fc、fs、脉冲重复频率、速度、numpulses, c, Rc);bpa_processed = helperBackProjection (cdata, rnggrid fastTime, fc、fs、脉冲重复频率、速度、crossRangeResolution, c);
可视化最后的SAR图像。
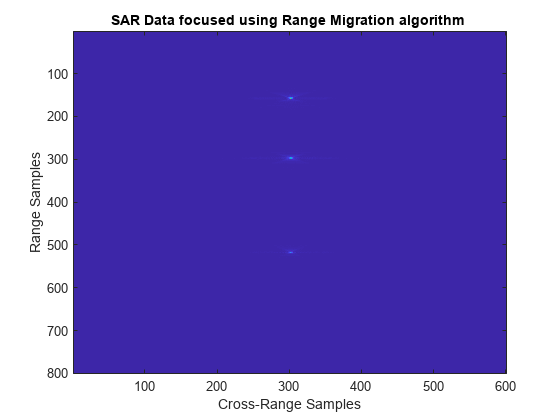
利用距离偏移算法和近似反投影算法绘制聚焦SAR图像。只有通过距离偏移算法形成的图像的一部分能够准确地指向目标的位置。
[2]和[3]所示的反投影算法的距离偏移和精确形式提供了跨航迹和沿航迹方向的理论分辨率。由于这里使用的反投影是近似形式,反投影在方位角方向上的扩展明显,而距离偏移算法处理的数据表明达到了理论分辨率。
图(1);显示亮度图像((abs ((rma_processed(1700:2300 600:1400)。”))));标题(“使用距离偏移算法聚焦SAR数据”)包含(“横向距离样本”) ylabel (的范围的样品)
图(2)显示亮度图像((abs (bpa_processed (600:1400 1700:2300))));标题(“使用反投影算法聚焦SAR数据”)包含(“横向距离样本”) ylabel (的范围的样品)

总结
这个示例展示了如何在机载数据收集场景中利用LFM信号开发SAR处理。该示例还演示了如何通过距离偏移和近似形式的反投影算法从接收信号生成图像。
参考文献
Cafforio, C., Prati, C. and Rocca, F., 1991。利用地震偏移技术对SAR数据进行聚焦。机械工程学报,27(2),pp. 198 - 202。
卡明,I. Bennett, J., 1979。海相SAR数据的数字处理。IEEE国际声学、语音和信号处理会议。
纳勇,吕勇,孙海涛,超宽带SAR成像的反投影和距离偏移算法,光子学报,2006。, Waltham, MA, 2006, pp. 320-324。
Yegulalp A.F。1999。合成孔径雷达的快速反投影算法。1999年IEEE雷达会议论文集。
附录
范围偏移算法
函数azcompresseddata = helperRangeMigration (sigData fastTime, fc、fs、脉冲重复频率、速度、numPulses, c, Rc)
该函数演示了侧视合成孔径雷达成像的距离偏移算法。该算法考虑了脉冲压缩合成孔径数据。
设置范围频率跨度。
frequencyRange = linspace (fc-fs / 2, fc + fs / 2,长度(fastTime));krange = 2 *(2 *π* frequencyRange) / c;
设置横距波数。
kaz = 2π* * linspace(脉冲重复频率/ 2,脉冲重复频率/ 2,numPulses)。/速度;
生成一个横距波数矩阵,以匹配接收到的二维SAR信号的大小
kazimuth = kaz。”;kx = krange。^ 2-kazimuth。^ 2;
设定最后的波数以实现方位聚焦。
kx =√kx。* (kx > 0));kFinal = exp (1 * kx。* Rc);
对距离压缩信号执行二维FFT。
sdata = fftshift (fft (fftshift (fft (sigData [], 1), 1), [], 2), 2);
执行体积压缩以获得参考范围的方位压缩。用新的横距波数对二维FFT信号进行滤波,实现在参考距离上的完全聚焦,并作为副产品对不在参考距离上的目标进行部分聚焦。
fsmPol = (sdata。”)。* kFinal;
执行Stolt插值来实现对不在参考范围内的目标的聚焦
stoltPol = fsmPol;为i = 1:尺寸((fsmPol), 1) stoltPol(我:)= interp1 (kx(我,:),fsmPol(我,:),krange (1:));结束stoltPol (isnan (stoltPol)) = 1 e-30;stoltPol = stoltPol。* exp (1 * krange。* Rc);azcompresseddata = ifft2 (stoltPol);结束
投影算法
函数data = helperBackProjection (sigdata rnggrid fastTime, fc, fs,脉冲重复频率,速度,crossRangeResolution, c)
该函数演示了用于侧视合成孔径雷达成像的时域反投影算法。该算法以脉冲压缩合成孔径数据为输入。初始化输出矩阵。
data = 0(大小(sigdata));azimuthDist = -200:速度/脉冲重复频率:200;%方位距离
限制正在处理的范围和交叉范围像素,以减少处理时间。
Rangelims = [700 1400];cross - rangelims = [-10 10];
根据量程限制索引量程网格。
rangeIdx = [find(rnggrid>rangelims(1), 1)]“最后一次”));
根据横向距离限制索引方位角距离。
crossrangeIdxStart =找到(azimuthDist > crossrangelims (1), 1);crossrangeIdxStop =找到(azimuthDist < crossrangelims (2), 1,“最后一次”);为i = rangeIdx (1): rangeIdx (2)遍历范围索引使用期望的横向距离分辨率,计算合成孔径%的长度lsynth = (c / fc) * (c * fastTime (i) / 2) / (2 * crossRangeResolution);lsar = round(lsynth*length(azimuthDist)/azimuthDist(end));%确保lsar为奇数Lsar = Lsar + mod(Lsar,2);%构造汉宁窗口进行横向距离处理,以抑制方位角旁瓣hn =汉宁(lsar)。”;迭代跨范围索引为j = crossrangeIdxStart: crossrangeIdxStopx方向方位角距离比交叉距离指数的%posx = azimuthDist (j);y方向上的百分数除以范围指数诗句= c * fastTime(我)/ 2;%初始化计数为零数= 0;遍历合成光圈为K = j+ lsar/2 +1:j+ lsar/2%每个距离和交叉距离指数的时间延迟td=√((azimuthDist(k)- posx)^2 + posy^2)*2/c;Cell = round(td*fs) +1;信号= sigdata(细胞、k);数=数+ hn (k - (j-lsar / 2)) *信号* exp (1 j * 2 *π* fc * (td));结束%处理的数据在每个范围和交叉范围指数数据(i, j) =计数;结束结束结束
你也可以从以下列表中选择一个网站: