针对固定翼UAV的调谐航点追随者
此示例在使用该示例后,设计了一种运行控制器的控制器,用于使用该固定翼无人驾驶飞行器(UAV)指导模型和航点追随者块。
该示例通过不同的控制配置迭代,并通过模拟固定翼UAV的运动模型来演示UAV飞行行为。
指导模型配置
固定翼引导模型近似于由固定翼空气动力学和自动驾驶仪组成的闭环系统的运动行为。该指导模型适用于在稳定的UAV稳定飞行条件附近模拟小无人机航班。我们可以使用指导模型来模拟由航点跟随器引导的固定翼UAV的飞行状态。
以下Simulink®型号可金宝app用于观察固定翼引导模型响应对步骤控制输入。
Open_System('uavstepresponse');
与航点追随者集成
这固定行进落地模型与固定翼引导模型集成了航点跟随器。该模型演示了如何从引导模型输出总线信号中提取必要的信息并将其送入航点跟随器。该模型组装了指导模型块的控制和环境输入。
Open_System('固定行进是');
航点跟随器配置
Waypoint跟随器控制器包括两部分,aUAV Waypoint追随者块和固定翼UAV标题控制器。

UAV Waypoint跟随器块基于当前姿势,寻道距离和给定的航点组计算UV的期望标题。沿着这些标题方向飞行,UAV在列表中访问每个航点(在指定的转换半径范围内)。
标题控制块是一种比例控制器,通过控制协调飞行条件下的滚动角度来调节UAV标题角度。
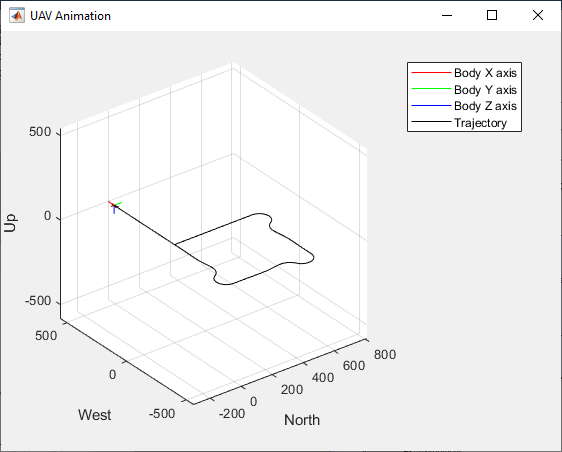
这UAV动画块可视化UAV飞行路径和态度。对于在无风状态下的固定翼仿真,体俯仰角是飞行路径角度和攻击角的总和。对于小型固定翼UAV,攻击角通常由自动驾驶仪控制,并且仍然相对较小。为了可视化目的,我们将俯仰角与飞行路径角近似。在无风零侧滑动条件下,体横摆角与前角度相同。
通过仿真跟踪控制器后的曲调
模拟模型。使用滑块调整控制器航点后面。
SIM(“固定行进是”)
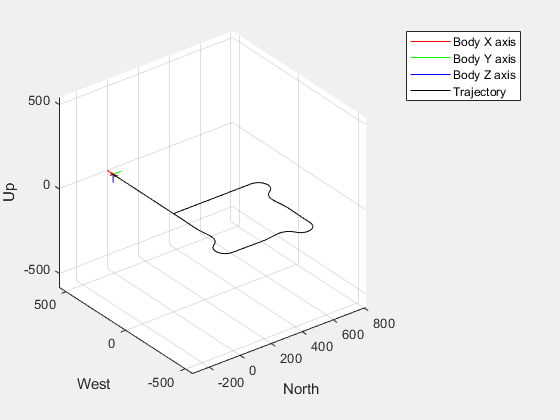
下图显示了具有小型保护距离(5)和快速标题控制(3.9)的飞行行为。请注意,UAV遵循航点之间的曲线。


下图显示了具有大的超级距离和慢速控制的飞行行为。

概括
此示例通过多组控制参数手动迭代来调整UAV飞行控制器。可以扩展此过程以自动扫描大集控制参数以获得定制导航控制器的最佳控制配置。
一旦飞行行为满足设计规范,考虑使用使用航空航天块集或外部飞行模拟器构建的高保真模型测试所选择的控制参数。
%关闭Simul金宝appink模型close_system(“uavstepresponse”);close_system(“固定行进是”);
您还可以从以下列表中选择一个网站: