雷达脉冲压缩
的效果脉冲压缩,其中发射的脉冲被调制并与接收的信号相关。脉冲压缩用于雷达和声纳系统,通过缩短回波持续时间来提高信噪比和距离分辨率。
时域互相关
矩形的唧唧声
首先,用矩形脉冲可视化脉冲压缩。创造一个一秒长的脉冲频率f0的10Hz和采样率fs的1kHz。
Fs = 1e3;Tmax = 15;Tt = 0:1/fs:tmax-1/fs;F0 = 10;T = 1;t = 0:1/fs: t -1/fs;PLS = cos(2*pi*f0*t);
创建从处开始的接收信号5基于原始脉冲的秒数,没有任何噪音。信号代表越来越远的目标,其反射信号被2秒。反射率项裁判确定接收脉冲的发射功率的百分比。衰减因子丙氨酸指示信号强度随时间下降的程度。
T0 = 5;dt = 2*T;LGS = t0:dt:tmax;Att = 1.1;Ref = 0.2;rpl = pulstran (tt, lgs;裁判* att。^ - (lgs-t0)]”,请,fs);
添加高斯白噪声。的信噪比15dB。
信噪比= 15;r = randn(size(tt))*std(pls)/db2mag(SNR);Rplsnoise = r+rpls;
将接收信号与发射脉冲交叉关联,并绘制处理后的信号。为了方便起见,将发射脉冲、无噪声的接收脉冲和有噪声的接收信号绘制在上图中。
[m,lg] = xcorr(rplsnoise,pls);M = M (lg>=0);Tm = lg(lg>=0)/fs;Subplot (2,1,1) plot(tt,rplsnoise,t,pls,tt,rpls) xticks(lgs)图例(嘈杂的收到的,“初始脉冲”,“无声的接受”)标题(“发送/接收信号”) ylabel (“(L.U.)级”) subplot(2,1,2) plot(tm,abs(m)) xticks(lgs)标题(“匹配的过滤器输出”)包含(“时间(s)”) ylabel (“(L.U.)级”)

如果这些回波来自多个目标,就有可能大致了解目标的位置,因为回波分布得足够远。然而,如果目标距离较近,它们的反应就会混合。
dt = 1.5*T;LGS = t0:dt:tmax;rpl = pulstran (tt, lgs;裁判* att。^ - (lgs-t0)]”,请,fs);Rplsnoise = r + rpls;[m,lg] = xcorr(rplsnoise,pls);M = M (lg>=0);Tm = lg(lg>=0)/fs;Subplot (2,1,1) plot(tt,r,t,pls,tt,rpls) xticks(lgs)图例(嘈杂的收到的,“初始脉冲”,“无声的接受”)标题(“发送/接收信号”) ylabel (“(L.U.)级”) subplot(2,1,2) plot(tm,abs(m)) xticks(lgs)标题(“匹配的过滤器输出”)包含(“时间(s)”) ylabel (“(L.U.)级”)

改善距离分辨率,或探测近距离目标的能力,使用线性频率调制脉冲进行相互关联。
线性调频(FM)啁啾
完成相同的过程,但使用复杂的啁啾,频率从0 Hz开始,线性增加到10 Hz。现实雷达系统通常使用复值线性调频信号来提高距离分辨率,因为匹配的滤波器响应更大更窄。由于啁啾和匹配滤波器有一个虚分量,所有的图都必须使用波形的实部分。
pls = chirp(t,0, t, f0,“复杂”);rpl = pulstran (tt, lgs;裁判* att。^ - (lgs-t0)]”,请,fs);r = randn(size(tt))*std(pls)/db2mag(SNR);Rplsnoise = r + rpls;[m,lg] = xcorr(rplsnoise,pls);M = M (lg>=0);Tm = lg(lg>=0)/fs;Subplot (2,1,1) plot(tt,real(r),t,real(pls),tt,real(rpls)) xticks(lgs)图例(嘈杂的收到的,“初始脉冲”,“无声的接受”)标题(“发送/接收信号”) ylabel (“(L.U.)级”) subplot(2,1,2) plot(tm,abs(m)) xticks(lgs)标题(“匹配的过滤器输出”)包含(“时间(s)”) ylabel (“(L.U.)级”)

与线性调频啁啾的互相关提供了更好的目标噪声分辨率,尽管目标回波更接近。与矩形啁啾相比,回波的旁瓣也大大减少,允许更精确的目标检测。
频域卷积
虽然互相关确实提高了距离分辨率,但该算法更适合于模拟硬件实现。更常见的是,雷达系统在数字领域采用了类似的过程匹配滤波,其中接收信号与发射脉冲的时间反转版本进行卷积。匹配滤波通常在频域进行,因为时域卷积等价于频域乘法,使处理速度更快。由于初始脉冲是时间反转的,滤波后的输出被脉冲宽度延迟T也就是1秒。
为了显示这一点,对原始线性调频脉冲进行时间反转,并对脉冲进行零填充,使脉冲和传输波形长度相同。计算并绘制时间反转脉冲与噪声信号的复共轭傅里叶变换。在频域中将两个脉冲相乘并绘制乘积
Pls_rev = [fliplr(pls) 0(1,长度(r) -长度(pls))];PLS = fft(conj(pls_rev));R = fft(rplsnoise);fft_conv = PLS.*R;faxis = linspace(-fs/2,fs/2,length(PLS));clf subplot(3,1,1) plot(faxis,abs(fftshift(PLS))) title(时间反转发射脉冲的FFTxlim([-100 100])“(L.U)级”) subplot(3,1,2) plot(faxis,abs(fftshift(R))) title(“噪声信号的FFT”xlim([-100 100])“(L.U)级”) subplot(3,1,3) plot(faxis,abs(fftshift(fft_conv))) title(“乘信号的FFT”)包含(的频率(赫兹)xlim([-100 100])“(L.U)级”)

将得到的信号转换回时域并绘制出来。
Pls_prod = ifft(fft_conv);clf plot((0:length(pls_prod)-1)/fs,abs(pls_prod)) xticks(lgs+T) xlabel(“时间(s)”) ylabel (“(L.U.)级”)标题(“匹配的过滤器输出”)

使用窗口的旁瓣减小
为了平滑匹配滤波后的旁瓣,在时间反转之前对发射脉冲施加一个窗口。上一节中的步骤是为了更好地可视化频域匹配滤波的过程。这个函数fftfilt可以快速对函数应用匹配筛选。
N = fftfilt(fliplr(conj(pls)),rplsnoise);N_win = fftfilt(fliplr(conj(pls).*taylorwin(length(pls), 30)'),rplsnoise);clf plot(tt,abs(n),tt,abs(n_win)) xticks(lgs+T) xlabel(“时间(s)”) ylabel (“(L.U.)级”)传说(“没有窗口”,“汉明窗”)标题(“匹配的过滤器输出”)

多普勒位移目标
当雷达脉冲从静止目标反射时,脉冲未被调制,因此当发射波形用于匹配滤波时具有较大的响应。然而,运动目标反射多普勒移脉冲,使得匹配滤波的响应不强。一种解决方案是使用一组具有多普勒频移波形的匹配滤波器,可以用来确定反射脉冲的多普勒频移。雷达系统可以估计目标速度,因为多普勒频移与速度成正比。
为了显示使用一组匹配滤波器的多普勒处理,创建一个多普勒移位的响应5赫兹。
pls = chirp(t,0, t, f0,“复杂”);Shift = 5;pls_shift = chirp(t,shift, t, f0+shift,“复杂”);rpls_shift = pulstran (tt, lgs;裁判* att。^ - (lgs-t0)]”,pls_shift fs);r = (randn(大小(tt)) + 1 j * randn(大小(tt))) *性病(pls) / db2mag(信噪比);Rplsnoise_shift = r + rpls_shift;
创建一组多普勒位移脉冲,并观察每个匹配滤波器的响应差异。
Filters = [];为Foffset = 0:4:10 filters = [filters;0 + foffset唧唧声(t, t, f0 + foffset,“复杂”));结束
绘制原脉冲和新脉冲的频域图,新脉冲的频域偏移量为5赫兹。
clf pspectrum([请;Pls_shift].',fs) xlim([-100 100])

将每个匹配的滤波器应用于频移脉冲并绘制输出。
Matched_pls = fftfilt(fliplr(conj(pls_shift)),rplsnoise_shift);filt_bank_pulse = fftfilt(fliplr(filters)',rplsnoise_shift);CLF subplot(2,1,1) plot(tt,abs(matched_pls),“颜色”,[0.6350, 0.0780, 0.1840])标题(匹配滤波器(5hz)) ylabel (“(L.U.)级”) xticks(lgs+T) subplot(2,1,2) plot(tt, abs(filt_bank_pulse))“0赫兹”,“4赫兹”,“8赫兹”)标题(“匹配滤波器组”)包含(“时间(s)”) ylabel (“(L.U.)级”)
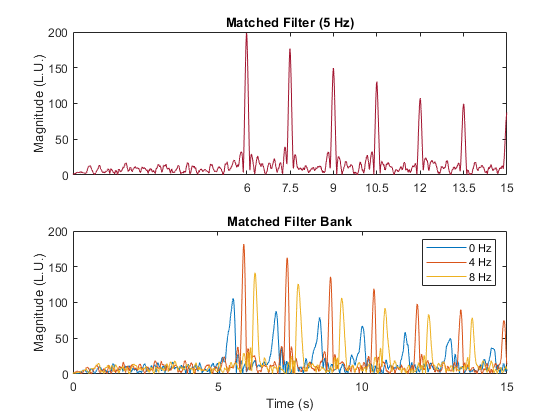
所有三个输出的图显示,匹配的滤波器平移4赫兹具有最大的响应,因此雷达系统将多普勒频移近似为4赫兹左右。使用更多的多普勒滤波器和更小的频移间隔有助于提高多普勒分辨率。
这种多普勒处理方法通常不使用,因为应用许多滤波器的速度较慢。雷达返回的大多数信号处理都是用数据立方体完成的,其中三个维度是快时间样本(脉冲内的范围响应)、阵列元素的数量和慢时间样本(脉冲的数量)。在系统确定目标的范围后,在慢时间维上进行傅里叶变换以确定目标的多普勒。对于这种设置,数据立方体方法不适合多普勒处理,因为系统只传输一个脉冲。当你有许多脉冲时,数据立方体方法效果最好,这就是为什么许多雷达系统使用脉冲序列,或一系列脉冲,而不是一个单一的脉冲用于距离多普勒处理。
另请参阅
您也可以从以下列表中选择一个网站: