在Matlab和Simulink中设计指导系统金宝app
此示例说明如何使用许多已发布的论文中所呈现的导弹机身模型(参考文献[1],[2]和[3])对应用于导弹自动驾驶仪设计的先进控制方法。该模型代表了马赫2和马赫4之间的尾部控制导弹,在10,000英尺(3,050米)和60,000英尺(18,290米)之间的高度,且典型的攻击角度在+/-20度之间。
机身动态的模型

该模型的核心元素是机身刚性体动力学的非线性表示。作用于导弹体的空气动力和时刻由具有入射和马赫数的非线性函数的系数产生。该模型可以使用Simulink®和Aerospace Blo金宝appckSet™创建。该块集的目的是提供参考组件,例如大气模型,这对于所有模型来说是常见的,而不管机身配置如何。这些示例中包含了航空航天块集中可用的组件的简化版本,以便为您提供从标准块库中获得的重用潜力的感觉。
打开模型。
代表Simulink中的机身金宝app
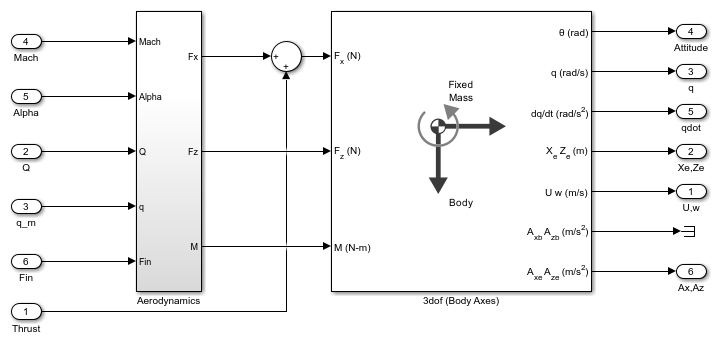
机身模型由四个主要子系统组成,通过加速度需求自动驾驶仪控制。大气模型计算大气条件的变化改变高度,鳍驱动器和传感器模型机身的自动驾驶仪,空气动力学和运动方程模型计算力和力矩的大小根据导弹的身体,并集成了运动方程。

国际标准大气模式

使用的大气子系统是国际标准气氛的近似,并分成两个单独的区域。对流层地区位于海拔和11公里之间,并且在该区域中,假设具有变化高度的线性温度下降。在对流层上方,较低的平流层区域在11km和20km之间。在该区域中,假设温度保持恒定。
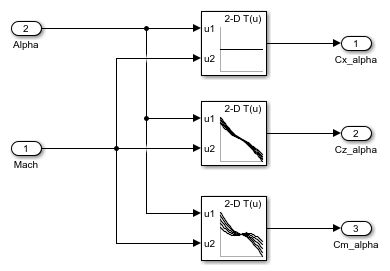
构建力和时刻的空气动力学系数
空气动力学和运动方程子系统生成了施加在导弹体轴上的力和力矩,并整合了定义机身线性和角运动的运动方程。
空气动力学系数存储在数据集中,并且在模拟期间,通过使用2-D查找表块的插值来确定当前操作条件下的值。
古典三环自动驾驶仪设计
导弹自动驾驶仪的目的是控制导弹体正常的加速度。在该示例中,自动驾驶仪结构是使用从放置在重心前面的加速度计的测量值的三环设计,以及提供额外阻尼的速率陀螺仪。控制器增益在入射和马赫数上调度,并在100,000英尺的高度上进行强大的性能。
使用经典设计技术设计自动驾驶仪要求机身间距动力学的线性模型被导出了关于许多修剪的飞行条件。MATLAB®可以确定修剪条件,直接从非线性Simulink模型中导出线性状态空间模型,保存时间,并帮助验证已创建的模型。金宝appMATLAB控制系统工具箱™和Simulink®ControlDesign™提供的功能允许设计人员可视化机机打开环路频率(或时间)金宝app响应的行为。要了解如何修剪和线性化空气框架模型,可以运行配套示例,“机身修剪和线性化”。

机身频率响应
自动驾驶仪的设计是在许多线性机身模型上进行的,这些模型是在不同的飞行条件下推导出的,横跨预期的飞行包络线。为了在非线性模型中实现自动驾驶仪,需要将自动驾驶仪增益存储在二维查找表中,并加入一个反收盘增益,以防止当鳍需求超过最大限制时积分器收盘。在非线性Simulink模型中测试自动驾驶仪是在执行器鳍和速率限制等非线性存在金宝app下显示满意性能的最佳方法,增益现在随着飞行条件的变化而动态变化。
数字:增金宝app益计划自动驾驶仪的Simulink实现
归位指导循环
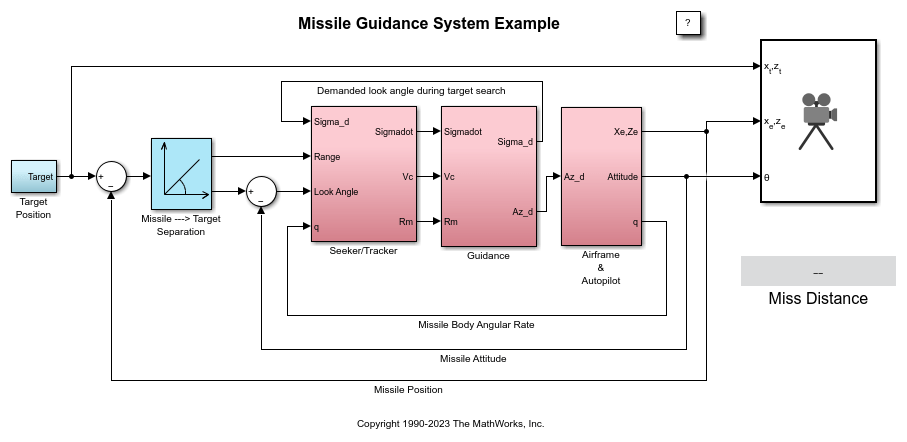
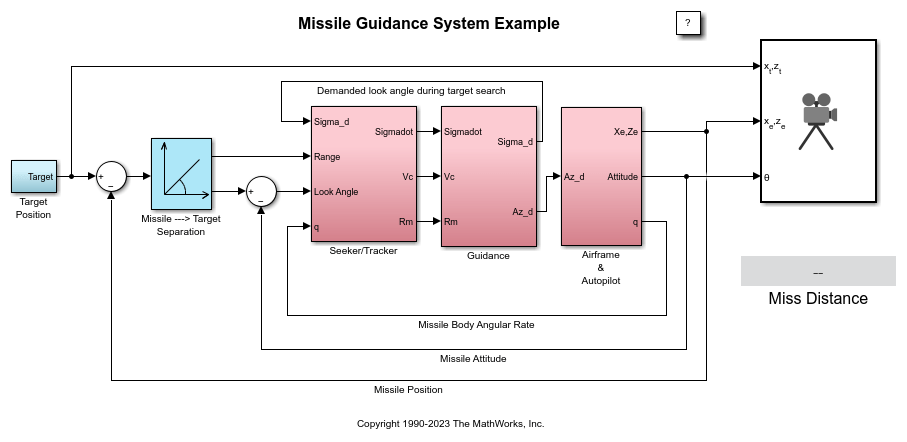
完整的寻的制导回路由导引头/跟踪器子系统组成,该子系统返回导弹和目标之间的相对运动测量值,制导子系统产生正常加速度要求,并传递给自动驾驶仪。自动驾驶仪现在是整个寻的制导系统内部回路的一部分。参考[4]提供了关于目前正在使用的制导不同形式的信息,并提供了用于量化制导回路性能的分析技术的背景信息。
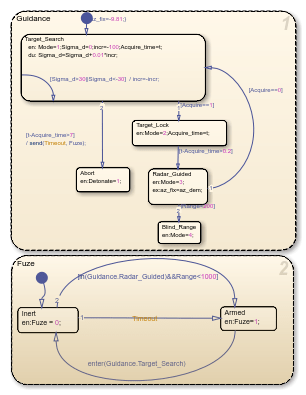
指导子系统
引导子系统的功能不仅在闭环跟踪期间生成需求,而且还执行初始搜索以定位目标位置。StateFlow®模型用于控制这些不同操作模式之间的传输。模式之间的切换是由在Simulink中生成的事件或状态流模型中的事件触发。金宝app通过更改变量的值来控制Simulink模型的方式金宝app实现的方式模式它被传递到Simulink。金宝app此变量用于在可以生成的不同控制需求之间切换。在目标搜索期间,通过向Seeker Gimbals发送需求来直接控制跟踪器(Sigma.).一旦目标位于导引头的波束宽度(获得),并且在短延迟关闭环路引导之后开始。StateFlow是一个理想的工具,用于快速定义所有操作模式,无论是正常运行还是不寻常的情况。例如,应该在目标上丢失锁定的锁定的动作,或者如果在该校正流图中迎合目标搜索期间未获取的目标。
比例导航指导
一旦寻求者获得了目标,将使用比例导航指导(PNG)法来引导导弹直到撞击。自20世纪50年代以来,这种形式的指导法已用于引导导弹,可应用于雷达,红外或电视导弹。导航法需要测量导弹和靶之间的闭合速度,该导弹和目标之间可以使用多普勒跟踪装置获得雷达引导导弹,以及惯性视线角度的变化率的估计。

数字:比例导航制导律
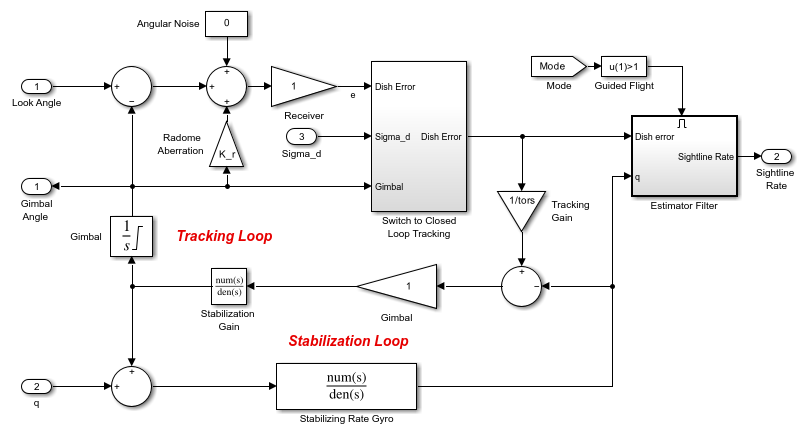
Seeker / Tracker子系统
导引头/跟踪器子系统的目的是驱动导引头万向节以保持导引头碟形对准目标,并为制导律提供视线速率的估计。跟踪器循环时间常数t设置为0.05秒,并选择作为最大响应速度和保持噪声传输在可接受水平之间的折衷。稳定回路的目的是补偿身体的旋转率和增益ks.,即回路交叉频率,受稳定速率陀螺带宽的限制,被设置得尽可能高。视距速率估计值是由稳定速率陀螺测量的碟面角度变化率之和的滤波值,角跟踪误差变化率估计值(e)由接收器测量。在该示例中,估计器过滤器的带宽被设置为自动驾驶仪的带宽的一半。
radome畸变
对于雷达制导导弹来说,通常模拟的寄生反馈效应是天线罩像差。它发生的原因是,覆盖在导引头上的保护性覆盖的形状扭曲了返回的信号,然后给目标一个错误的角度读数。一般情况下,变形量是当前框架角的非线性函数,但常用的近似方法是假设框架角与变形量之间存在线性关系。在上述系统中,天线罩像差是在标记为“天线罩像差”的增益块中计算的。其他寄生效应,如速率陀螺对正常加速度的灵敏度,也经常被建模来测试目标跟踪器和估计滤波器的鲁棒性。

数字:rantome像差几何
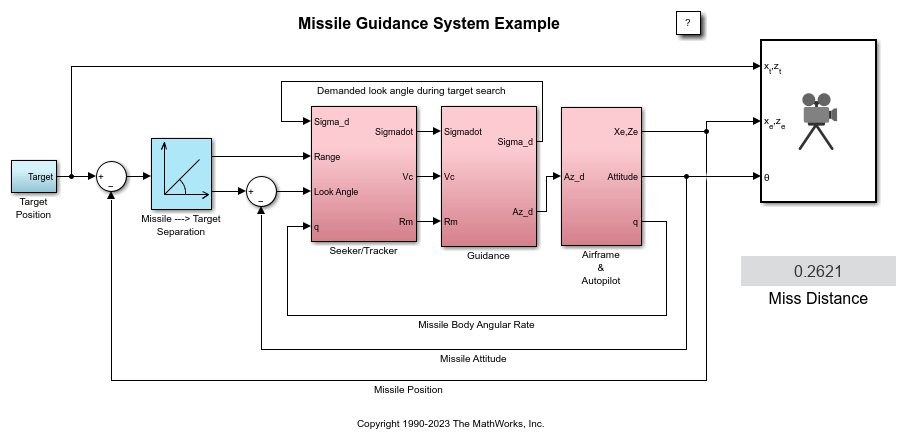
运行指导仿真
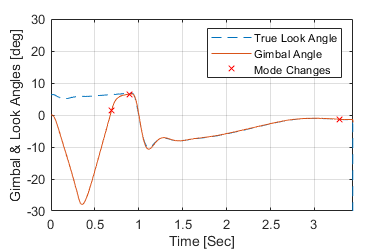
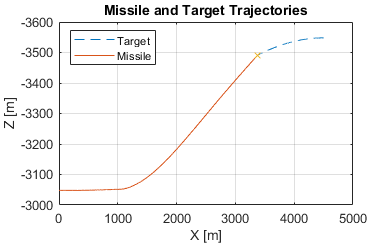
现在展示整个系统的性能。在这种情况下,目标被定义为以恒定速度的速度行进,在次数导弹标题上以往复导弹标题,高于初始导弹位置的500米。从仿真结果,可以确定采集发生0.69秒的接合,在0.89秒后开始闭环引导。用目标的影响发生在3.46秒,并且在最接近的方法的范围内计算为0.265米。
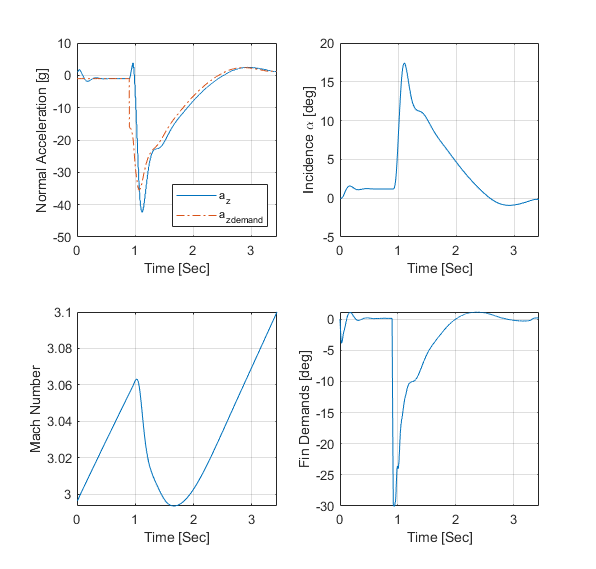
aero_guid_plot.m脚本创建性能分析
动画块为模拟提供了一个可视化的参考
参考
1.“具有有界参数速率的鲁棒LPV控制”,S.Bennani, D.M.C. Willemsen, C.W. Scherer, AIAA-97-3641, 1997年8月。
2.“使用国家依赖的Riccati公式方法”全包络导弹纵向自动孔设计“,C.P.MRACEK和J.R.Cloutier,AIAA-97-3767,1997年8月。
3.“使用线性参数变化变换获得预定的导弹自动驾驶仪设计”,J.S.Shamma,J.R. Cloutier,Conce,Convance,Control和Dynamics,Vol.16,1993年3月2日。
4.“现代导航、制导和控制处理卷2”,林清芳,ISBN 0-13-596230-7, Prentice Hall, 1991。
相关话题
您还可以从以下列表中选择一个网站:
