发动机速度模型的线性化
这个例子显示了如何线性发动机转速的模式。
工作点的产生
打开模型。
scdspeed
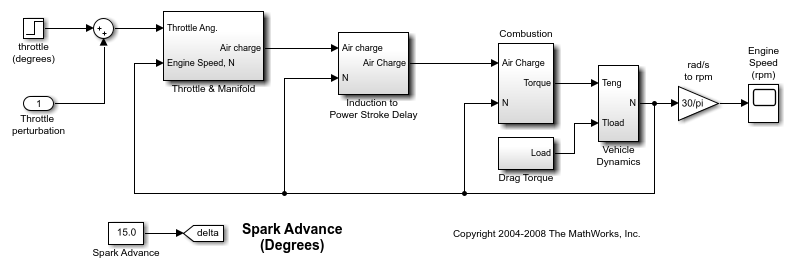
此示例产生线性输出的发动机速度的模型和输入之间的点火提前和节气门角度。所述FINDOP命令在2000,3000,和4000转计算在稳态条件下的运行点。
使用该命令创建操作点规范对象
opspec = operspec (“scdspeed”)
型号scdspeed的工作点规范。(时变组件评估在时间t = 0): - - - - - - - - - - - (1) scdspeed /油门&歧管/进气歧管/ p0 = 0.543条规范:dx = 0,初步猜测:0.543 (2)scdspeed /车辆动力学/ w = t / / J w0 = 209 rad / / s规范:dx = 0,初步猜测:209输入:- - - - - - - - - - - (1)scdspeed /油门扰动初始猜测:0输出:- - - - - - - - - - -
接下来,指定所需的操作条件。将车辆动力学的第一个输出端口固定为2000、3000和4000 rpm。使用ADDOUTPUTSPEC命令来完成此任务。
opspec = addoutputspec (opspec,“scdspeed / rad / / s rpm”1);
设置第一个操作规范
opspec.Output。= 1;opspec.Outputs。y = 2000;
搜索符合此规范的操作点
op (1) = findop (“scdspeed”,opspec);
操作点搜索报告:——scdspeed型号的操作点搜索报告。(t=0时刻评估的时变元件)工作点规格成功满足。状态:- - - - - - - - - - - (1)scdspeed /油门&歧管/进气歧管/ p0 = 0.543条x: 0.544 dx: 2.66 e-13 (0) (2) scdspeed /车辆动力学/ w = T / / J w0 = 209 rad / / s x: 209 dx: -8.48 e-12(0)输入:- - - - - - - - - - - (1)scdspeed /节流扰动u: 0.00382(负无穷到正无穷)输出:- - - - - - - - - - - (1)scdspeed / rad / / s rpm y: 2 e + 03 (2 e + 03)
现在,搜索剩下的3000和4000转每分钟转速的操作点
opspec.Outputs。y = 3000;op (2) = findop (“scdspeed”,opspec);opspec.Outputs。y = 4000;op (3) = findop (“scdspeed”,opspec);
操作点搜索报告:——scdspeed型号的操作点搜索报告。(t=0时刻评估的时变元件)工作点规格成功满足。状态:----------(1)scdspeed /节流&集成块/进气歧管/ P0 = 0.543巴X:0.49 DX:-5.14e-15(0)(2)scdspeed /车辆动态/w = T//J w0 = 209 rad//s x: 314 dx: 4.57e-13 (0) Inputs: ---------- (1.) scdspeed/Throttle perturbation u: 2.94 [-Inf Inf] Outputs: ---------- (1.) scdspeed/rad//s to rpm y: 3e+03 (3e+03) Operating point search report: --------------------------------- Operating point search report for the Model scdspeed. (Time-Varying Components Evaluated at time t=0) Operating point specifications were successfully met. States: ---------- (1.) scdspeed/Throttle & Manifold/Intake Manifold/p0 = 0.543 bar x: 0.473 dx: 1.13e-11 (0) (2.) scdspeed/Vehicle Dynamics/w = T//J w0 = 209 rad//s x: 419 dx: -1.49e-10 (0) Inputs: ---------- (1.) scdspeed/Throttle perturbation u: 5.83 [-Inf Inf] Outputs: ---------- (1.) scdspeed/rad//s to rpm y: 4e+03 (4e+03)
模型线性化
操作点现在已经准备好进行线性化。首先使用以下命令指定输入和输出点:
io (1) = linio ('scdspeed /油门(度)',1“输入”);io (2) = linio (scdspeed /点火提前的,1“输入”);io (3) = linio (“scdspeed / rad / / s rpm”,1“输出”);
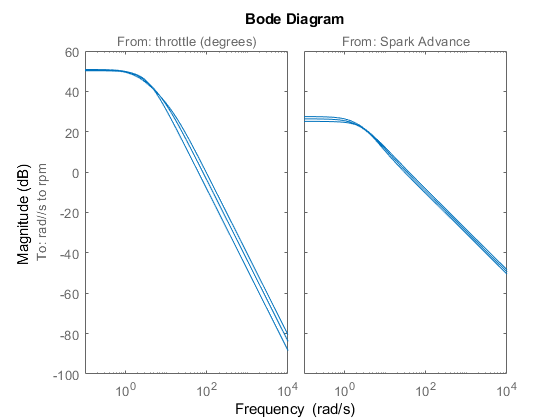
将模型线性化,并绘制出每种情况下的波德星等响应。
sys =线性化(“scdspeed”op, io);bodemag(系统)
关闭模式。
bdclose (“scdspeed”)
你也可以从以下列表中选择一个网站: