同步金宝app使用工作点规范的模型更改
修改Simulink.金宝app®模型可以更改,添加或删除更改操作点的状态,输入或输出。您可以同步现有的操作点规范对象以反映模型中的更改。
同步模型更改使用稳态经理
如果您更改了Simulink模型金宝app稳态经理打开,您必须同步操作点规范稳态经理反映模型的变化。
打开Simulin金宝appk模型。
sys = ('scdspeedctrl');open_system(系统)
打开稳态经理,在Simulin金宝appk模型窗口中,在应用画廊,点击稳态经理。
根据当前模型配置创建操作规范,在稳态经理,在这方面稳定状态选项卡,单击整齐规范。
在spec1文档中,参考滤波器块有一个州。
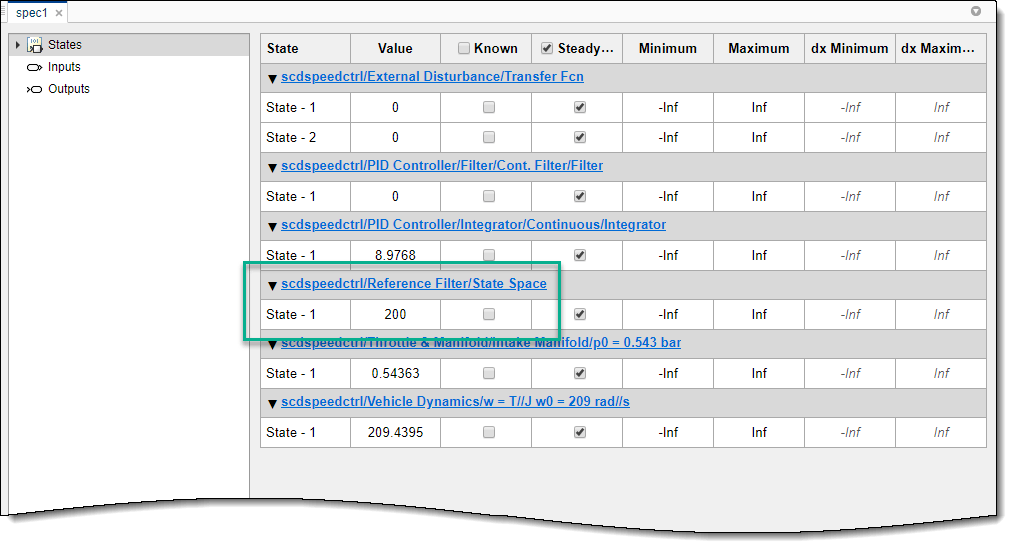
在Simuli金宝appnk模型窗口中,双击参考滤波器堵塞。改变分子转移功能One hundred.,改变分母到[1 20 100]。
点击好吧。
这个更改增加了过滤器的顺序,向Simulink模型添加了一个状态。金宝app
更新操作点规范以反映模型更改,在稳态经理,在这方面规范选项卡,单击从模型同步。
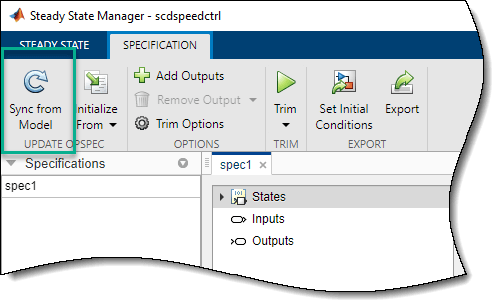
软件更新规格。的参考滤波器Block现在有两种状态。
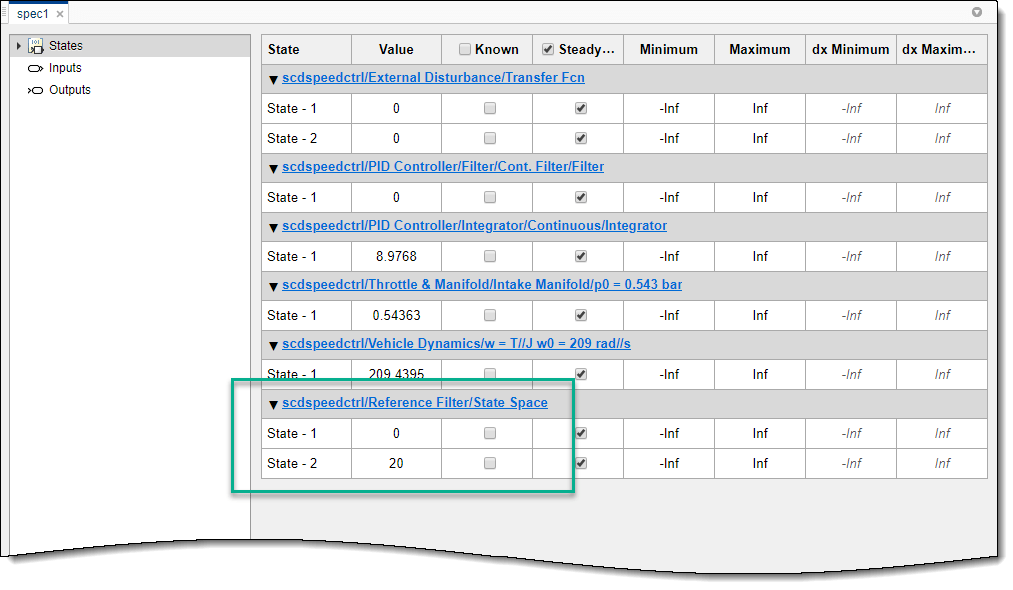
找到满足这些规格的操作点规范选项卡,单击修剪![]() 。
。
同步模型更改使用模型线性化电路
如果您更改了Simulink模型金宝app模型线性化电路打开,您必须同步操作点规范模型线性化电路反映模型的变化。
打开Simulin金宝appk模型。
sys = ('scdspeedctrl');open_system(系统)
打开模型线性化电路,在Simulin金宝appk模型窗口中,在应用画廊,点击模型线性化电路。
在模型线性化电路,在操作点下拉列表,选择修剪模型。
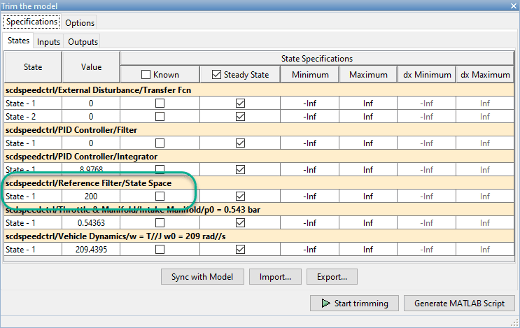
在修剪模型对话框中,参考滤波器块包含一个状态。
在Simuli金宝appnk模型窗口中,双击参考滤波器堵塞。改变分子转移功能One hundred.,改变分母到[1 20 100]。
点击好吧。
这个更改增加了过滤器的顺序,向Simulink模型添加了一个状态。金宝app
要更新操作点规范以反映模型更改,请在“修剪模型”对话框中单击与模型同步。
软件更新规格。的参考滤波器Block现在有两种状态。

要找到满足这些规范的工作点,请单击开始削减
在命令行中同步模型更改
此示例显示如何使用Simulink®模型的更改更新现有的操作点规范对象。金宝app
打开模型。
sys ='scdspeedctrl';open_system(系统)

基于当前模型配置创建操作点规范对象。
OPSPEC = OPERSPEC(SYS)
模型SCDSPeedCTRL的操作点规范。(在时间t = 0评估的时变组分)状态:----------(1.)SCDSPEEDCTRL /外部干扰/转移FCN规范:DX = 0,初始猜测:0规格:DX = 0,初始猜测:0(2.)SCDSPEEDCTRL / PID控制器/过滤器/ vert。过滤器/过滤器规格:DX = 0,初始猜测:0(3)SCDSPEEDCTRL / PID控制器/集成器/连续/积分器规格:DX = 0,初始猜测:8.98(4)SCDSPEEDCTRL /参考滤波器/状态空间规格:dx = 0,初始猜测:200(5.)SCDSpeedCtrl /油门和流动式/进气歧管/ P0 = 0.543栏规格:DX = 0,初始猜测:0.544(6)SCDSPeedCTRL /车辆动态/ W = T // JW0 = 209 rad // s规格:dx = 0,初始猜测:209输入:无----------输出:无 -
更改Reference Filter块的传递函数。设置分子参数到One hundred.和分母参数到[1 20 100]。
set_param('scdspeedctrl /参考滤波器'那'n'那“100”);set_param('scdspeedctrl /参考滤波器'那'D'那“[1 20 100]”);
由于模型参数已更改,因此尝试找到满足规格的操作点OPSPEC.使用下面的命令会产生一个错误。
op = condop(sys,opspec);
更新操作点规范对象以反映模型中的更改。
opspec =更新(opspec);
找到符合更新规范的操作点。
op = condop(sys,opspec);
操作点搜索报告:-----------------------------------------操作点搜索模型scdspeedctrl的报告。(在时间t = 0评估的时变组分)成功满足操作点规范。州:---------(1.)SCDSPEEDCTRL /外部干扰/转移FCN X:0 DX:0(0)x:0 dx:0(0)(2.)SCDSPEEDCTRL / PID控制器/过滤器/续。滤波器/过滤器X:0 DX:0(0)(3)SCDSPEEDCTRL / PID控制器/ Integrator /连续/积分器X:8.98 DX:-4.51E-14(0)(4.)SCDSPEEDCTRL / THROTTLE&DIMMOLOM / INTAKEManifold/p0 = 0.543 bar x: 0.544 dx: 2.94e-15 (0) (5.) scdspeedctrl/Vehicle Dynamics/w = T//J w0 = 209 rad//s x: 209 dx: -1.52e-13 (0) (6.) scdspeedctrl/Reference Filter/State Space x: 0 dx: 0 (0) x: 20 dx: 0 (0) Inputs: None ---------- Outputs: None ----------
更新操作点规范对象后,优化算法成功找到了操作点。
也可以看看
相关的话题
你也可以从以下列表中选择一个网站: