金宝app子系统作为各国
通过使用Simulin金宝appk®状态流中的子系统®状态,您可以在周期性或连续时间动态之间切换混合动态系统或系统。在您的StateFlow图表中,您可以使用基于Simulink的状态来模拟金宝app周期性或连续动态系统与使用转换的切换逻辑组合。您可以在每个基于Simulink的状态下从图表中访问输入和输出。金宝app金宝appSimulink基于Simulink模型中金宝app的Soundflow图表支持。
要在基于Simulink的状金宝app态之间切换时初始化Simulink块,请使用Stateflow文本表示法或Simulink状态读取器和状态写入器块。
要创建基于Simulink的链接状金宝app态,请使用库保存操作子系统。将操作子系统从库模型复制到状态流程图时,它将显示为基于Simulink的链接状态。更新库块时,更改将反映在包含该块的所有状态流程图中。
使用Simu金宝applink的状态意味着您不必在equenflow中使用复杂的文本语法来模型混合系统。
何时使用金宝app基地国家
在以下情金宝app况下使用基于Simulink的状态:
您希望对包含连续或周期动力学的混合动态系统建模。
系统动力学的结构基本上改变了各种操作模式,例如建模PID控制器。
对于间歇地调用逻辑的系统,请使用Simulink函数。金宝app
当Simulink算法的结构基本保持不变,但某些增益金宝app或参数在各种模型之间切换时,使用Stateflow之外的Simulink逻辑。这种算法的一个例子是增益调度。看见模型在Simulink中获得增益预定控制系统金宝app(金宝appSimulink控制设计).
通过使用模型杆崇鞋金宝app基地国家
这状态流图表使用基于Simulink的状态对一个人在撑杆跳高阶段的移动进行建模。第一阶段是Vault程序的进近运行,它是在基于Simulink的状态金宝app下建模的跑起来. 在第二阶段中,跳高运动员植入撑杆并起跳,该阶段由基于Simulink的状态建模金宝app脱掉. 最后一个阶段发生在跳高运动员清除障碍物并释放杆时,该阶段由基于Simulink的状态建模金宝app飞.

状态流程图包含以下逻辑:

美国跑起来和飞使用笛卡尔坐标更容易建模。国家脱掉通过使用极坐标更容易模型。要从一个坐标系切换到另一个坐标系,请使用Simulink函数金宝app初始起飞和飞虱.
模型撑杆钻的方法
基于Si金宝appmulink的状态跑起来包含以下逻辑:
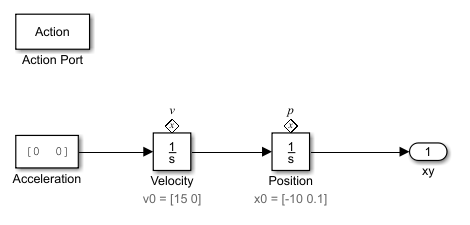
图表中的默认状态波兰人是跑起来. 该状态模拟撑杆跳高运动员沿地面向跳跃方向移动。撑杆跳高运动员从x轴上的-10开始向零跑去。当撑杆跳高运动员沿地面移动时,撑杆跳高运动员在xy平面上的位置不断变化,但跑步状态保持不变。在此模型中,积分器块位置和速度是国家所有人的街区吗状态读取器Simulink函数中的块金宝app初始起飞.该子系统输出了杆佛车的笛卡尔坐标。
将笛卡尔坐标转换为极性坐标
Simu金宝applink函数初始起飞包含以下逻辑:

一旦杆佛得特沿X轴的位置,第(1)页,变得大于-4,从跑起来到脱掉发生。过渡期间初始起飞如果已初始化,则状态读取器块连接到其所有者块,并执行该函数。此函数用于将笛卡尔坐标从位置和速度到极坐标,R,西塔,RDOT., 和θ点. 这些坐标输出为国家作家块,连接到状态中的所有者块脱掉.
模型撑竿跳长
基于Si金宝appmulink的状态脱掉包含以下逻辑:

一旦杆佛得特沿X轴的位置,第(1)页,变得大于-4,则活动状态变为脱掉.此Simu金宝applink子系统在跳跃的阶段期间塑造杆vaulter。子系统输出杆vaulter的笛卡尔坐标。
将极性坐标转换为笛卡尔坐标
Simu金宝applink函数飞虱包含以下逻辑:

一旦杆佛车的角度,西塔,变得比PI / 2.,从脱掉到飞发生。过渡期间飞虱如果已初始化,则状态读取器块连接到其所有者块,并执行该函数。此函数用于将极坐标从R,西塔, 和θ点到笛卡尔坐标系,xy_积分和xydot. 这些坐标输出为国家作家块,连接到状态中的所有者块飞.
模拟撑杆跳高运动员的自由落体
基于Si金宝appmulink的状态飞包含以下逻辑:

一旦杆佛车的角度,西塔,少于PI / 2.,则活动状态变为飞.这种状态在跳跃清除后撑杆佛特造型,杆佛车落到地面。当杆佛车落下时,杆仰杆在X-Y平面中的位置是连续变化的,但下降的状态保持不变。在此模型中,集成器块xydot和xy_积分是国家所有人的街区吗国家作家Simulink函数中的块金宝app飞虱.该子系统输出了杆佛车的笛卡尔坐标。
在XY图中可以看到此模拟的结果。

限制
不能将基于Simulink的状金宝app态用于:
摩尔图表
离散事件图
HDL编码器
PLC编码器
金宝appSimulink代码检查器
超阶跃迁
金宝app基于Simulink的状态不支持调试。金宝app
相关话题
您还可以从以下列表中选择一个网站: