主要内容
控制伺服电机
此示例显示如何使用MATLAB®支持包进行Arduino®硬件来控制业余爱好伺服电机金宝app。
硬件设置
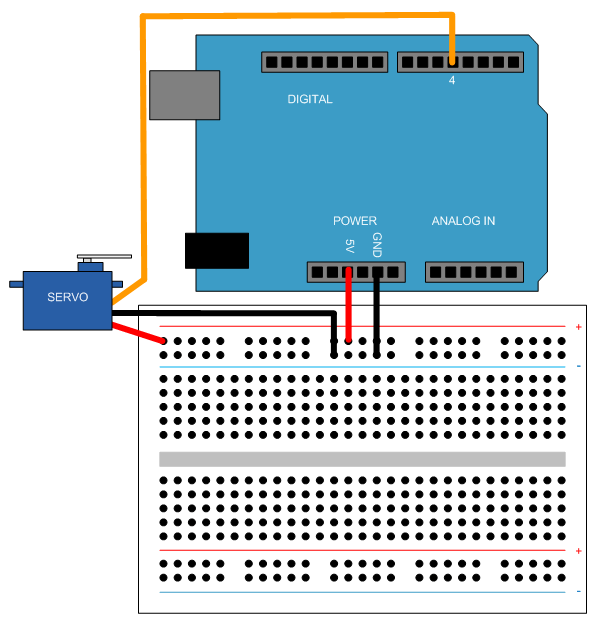
将FS5106B伺服电机连接到Arduino Hardware,
将电源线(通常是红色)连接到5V引脚。
将接地线(通常是黑色)连接到地销。
将信号线(通常是橙色)连接到数字销4。
创建伺服对象并校准电机
创建Arduino对象并包含伺服库。
a = arduino();
或者,您可以在创建Arduino对象的情况下在库中的名称 - 值对中明确指定它。
清除一种;a = arduino('com4'那'uno'那'图书馆'那'伺服');
创建伺服对象。
s =伺服(a,'d4')
s =伺服属性:PIN:'D4'MINPUSSENURATION:5.44E-04(秒)MaxPulsiveuration:2.40E-03(秒)
检查伺服电机的数据表脉冲宽度范围值,以校准电机以在预期范围内旋转。此示例使用700 * 10 ^ -6和2300 * 10 ^ -10 ^ -16电机从0移动到180度。
清除S.;s =伺服(a,'d4'那'min pulsireduration',700 * 10 ^ -6,'maxpulsiveration',2300 * 10 ^ -6)
s =伺服属性:PIN:'D4'MIN PULSEDURATION:7.00E-04(秒)MaxPulsiveuration:2.30E-03(秒)
写和阅读伺服位置
将伺服电机的轴位置从0(最小)更换为0.2,例如36度,增量。每次显示位置都会显示当前位置。
为了角度= 0:0.2:1写入(s,角度);current_pos = ReadPosition(s);current_pos = current_pos * 180;fprintf('当前的电机位置是%d度\ n',current_pos);暂停(2);结尾
电流电机位置为0度电流电机位置为36度电流电机位置为72度电机位置为108度电流电机位置是144度电机位置为180度
清理
一旦连接不再需要,清除关联对象。
清除S.一种
您还可以从以下列表中选择一个网站:
