限滑差速器
作为行星锥齿轮有限的差动
- 图书馆:
动力总成块/驱动器/最终驱动器单元
车辆动力学块组/动力系/动力传动系统/最终驱动单元
描述
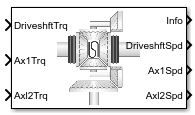
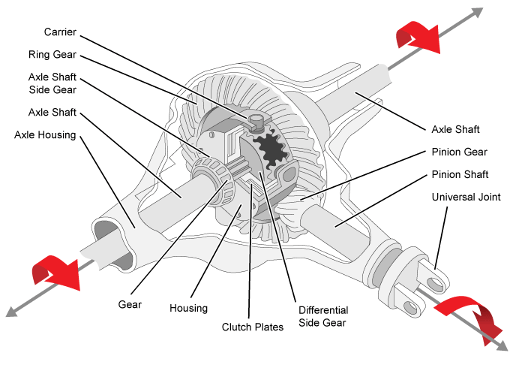
这限滑差速器块实现作为行星锥齿轮系差动。该块与驱动轴斜齿轮与冠(环)锥齿轮匹配。您可以指定:
载流轴比率
盆形齿轮定位
轴和载体的粘性和阻尼系数
滑动联轴器类型
使用系统级传动系分析中的块以解释从传输到车轮的电力传输。该块适用于循环硬件(HIL)和优化工作流程。所有参数都是可调调谐的。
在限滑差速器中,为了防止其中一个车轮打滑,差速器会将施加在左右轴上的扭矩分开。通过对车轴施加不同的扭矩,车轮可以以不同的角速度移动,从而防止打滑。该块采用三种方法耦合应用于轴的不同扭矩:
预装理想的离合器
滑动速度相关扭矩数据
输入扭矩依赖性扭矩数据
该块使用为标准发动机,传输和差分配置产生正轮胎和车辆运动的坐标系。箭头表示正动作。
效率
要计算块效率,请使用效率因素范围。此表总结了每个设置的块实现。
| 环境 | 实施 |
|---|---|
|
您可以使用恒定效率系数范围。 |
|
效率作为基齿轮输入扭矩,空气温度和驱动轴速度的函数。使用这些参数来指定查找表和断点:
对于空气温度,您可以:
要选择插值方法,请使用插值方法参数有关详细信息,请参阅插值方法。 |
电力会计
对于电源计费,块实现这些方程。
| 总线信号 | 描述 | 方程式 | ||
|---|---|---|---|---|
|
|
|
来自驱动轴的机械动力 |
|
|
来自轴1的机械电源 |
|
||
|
轴2的机械电源 |
|
||
|
|
总功率损失 |
|
|
|
阻尼引起的功率损失 |
|
||
|
离合器引起的功率损失 |
|
||
|
|
存储内部能量的速率变化 |
|
|
力学
这限滑差速器块实现这些微分方程以表示冠齿轮,左轴和右轴的机械动态响应。
| 机械动态响应 | 微分方程 |
|---|---|
| 伞齿轮 |
|
| 左筒轴 |
|
| 右轴 |
|
该块假定伞齿轮和轮轴之间存在刚性耦合。这些约束方程适用。
方程式使用这些变量。
| N | 托架与传动轴齿轮比 |
| jD. | 伞齿轮总成的转动惯量 |
| B.D. | 伞齿轮线性粘性阻尼 |
| ω.D. | 驱动轴角速度 |
滑速速度 |
|
| j1 | 轴1旋转惯性 |
| B.1 | 轴1线性粘性阻尼 |
| ω.1 | 轴1速度 |
| j2 | 轴2转动惯量 |
| B.2 | 轴2线性粘性阻尼 |
| ω.2 | 轴2角速度 |
| η. | 效率 |
| T.D. | 驱动轴扭矩 |
| T.1 | 轴1扭矩 |
| T.2 | 轴2扭矩 |
| T.一世 | 车轴内阻转矩 |
| T.I1 | 轴1内阻扭矩 |
| T.I2 | 轴2内阻扭矩 |
| μ. | 摩擦系数 |
有效的离合器半径 |
|
环形圆盘外半径 |
|
| R.一世 | 环形磁盘内半径 |
| FC | 离合器力 |
| T.C | 离合器扭矩 |
| μ. | 摩擦系数 |
中的表块限滑差速器具有这些参数设置:
插值方法-
线性外推法-
夹子
理想的离合器耦合模型使用轴滑动速度和摩擦力来计算离合器扭矩。摩擦系数是滑动速度的函数。
离合器盘半径决定离合器力作用的有效离合器半径。
轴的角速度决定了滑动速度。
为了计算离合器扭矩,滑动速度耦合模型使用作为滑动速度函数的扭矩数据。轴的角速度决定了滑动速度。
为了计算离合器扭矩,输入扭矩耦合模型使用作为输入扭矩的函数的扭矩数据。
这开式差速器块假定冠齿轮和轴之间的刚性连接。这些约束方程适用。
港口
输入
输出
参数
参考
[1] Deur,J.,Ivanović,V.,Hancock,M.和Assadian,F。“主动差动动态的建模”。在ASME程序中。运输系统。卷。17,pp:427-436。
扩展能力
也可以看看
您还可以从以下列表中选择一个网站: