频率响应转向角输入
这个例子展示了如何使用车辆动力学swept-sine转向参考应用程序来分析动态响应转向输入。具体来说,您可以检查车辆频率响应和横向加速度运行操作时不同的正弦波转向振幅。
swept-sine转向操纵测试车辆转向输入频率响应。在测试时,司机:
加速,直到车辆速度达到一个目标。
一个正弦方向盘输入的命令。
正弦波的频率线性增加。
参考应用程序的更多信息,请参阅Swept-Sine转向机动。
helpersetupsss;

运行一个Swept-Sine转向机动
1。打开了正弦参考信号发生器。默认情况下,策略与这些参数设置:
纵向速度定位点- 30英里每小时
转向振幅- 90度
最后的频率- 0.7赫兹
2。在可视化子系统,打开3 d引擎块。默认情况下,3 d引擎参数设置为禁用。三维可视化引擎平台需求和硬件建议,看到虚幻引擎模拟环境要求和限制。
3所示。运行操作使用默认设置。当模拟运行时,查看车辆信息。
mdl =“SSSReferenceApplication”;sim (mdl);
# # #开始连续模型参考模拟构建# # #成功更新了模型参考模拟目标:动力传动系统# # #成功更新了模型参考模拟目标:PassVeh14DOF # # #成功更新了模型参考模拟目标:SiMappedEngineV构建总结模拟目标构建:模型重建行动的原因= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =动力传动系统代码生成和编译Driveline_msf。mexw64并不存在。PassVeh14DOF PassVeh14DOF_msf代码生成和编译。mexw64并不存在。SiMappedEngineV SiMappedEngineV_msf代码生成和编译。mexw64并不存在。3 3模型建立(0模型已经更新)构建持续时间:0 h 5米31.546秒
车辆位置窗口,查看车辆纵向距离函数或外侧的距离。黄线是偏航率。蓝线是转向角。
可视化子系统,打开偏航率,引导范围块显示偏航速度和转向角与时间。

扫描转向
运行参考应用程序有三个不同的正弦波转向振幅。
1。swept-sine指导参考应用程序模型SSSReferenceApplication,打开了正弦参考信号发生器。的转向振幅,theta_hw块参数设置振幅。默认情况下,振幅是90度。
2。启动信号记录速度、车道和ISO的信号。您可以使用仿真软件®编辑器,或者金宝app或者,这些MATLAB®命令。保存模型。
启用信号日志记录的车道改变参考信号发生器输出港巷。
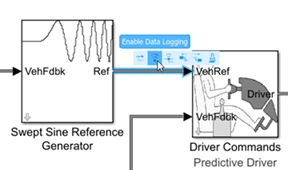
mdl =“SSSReferenceApplication”;open_system (mdl);ph = get_param (“SSSReferenceApplication /席卷正弦参考信号发生器”,“PortHandles”);set_param (ph.Outport (1),“数据采集”,“上”);
启用信号日志记录的外港客运车辆块信号。

ph = get_param (“SSSReferenceApplication /客运车辆”,“PortHandles”);set_param (ph.Outport (1),“数据采集”,“上”);
在可视化子系统,使信号ISO块的日志记录。

set_param ([mdl“可视化/ ISO 15037 - 1:2006”),“测量”,“启用”);
3所示。建立了一个指导振幅矢量,amp你想调查。例如,在命令行中,键入:
amp = (60、90、120);numExperiments =长度(amp);
4所示。创建一个数组模拟输入,设置了正弦参考信号发生器参数转向振幅,theta_hw等于amp。
为idx = numExperiments: 1:1 (idx) = Si金宝appmulink.SimulationInput (mdl);在(idx) = (idx) .setBlockParameter (mdl“/席卷正弦参考信号发生器”),…“theta_hw”num2str (amp (idx)));结束
5。保存模型和运行模拟。如果可用,使用并行计算。
save_system (mdl)抽搐;simout = parsim (,“ShowSimulationManager”,“上”);toc;
(截止2021年6月23日15:10:32]检查可用性平行池……(截止2021年6月23日15:10:32]开始仿真软件并行工人金宝app……(截止2021年6月23日15:10:34)加载项目并行的工作……(截止2021年6月23日15:10:34]配置模拟缓存文件夹平行工人……(截止2021年6月23日15:10:34)加载模型并行的工作……(截止2021年6月23日15:10:49]运行模拟……(截止2021年6月23日15:12:32]完成了1 3模拟运行[23 - jun - 2021 15:12:33]完成2 3模拟运行[23 - jun - 2021 15:12:33]完成3 3模拟运行[23 - jun - 2021 15:12:33]清理平行工人……运行时间是132.726107秒。
6。模拟完成后,关闭仿真数据检查器窗口。
使用模拟数据检查分析的结果
使用模拟数据检查员来检查结果。您可以使用UI,或者命令行功能。
1。检查员打开模拟数据。在仿真软件将来金宝app发布的模拟选项卡,在审查结果,点击数据检查。
在仿真数据检查,选择进口。

在进口对话框,
logsout。选择simout (1),simout (2),simout (3)。选择进口。

使用模拟数据检查员来检查结果。
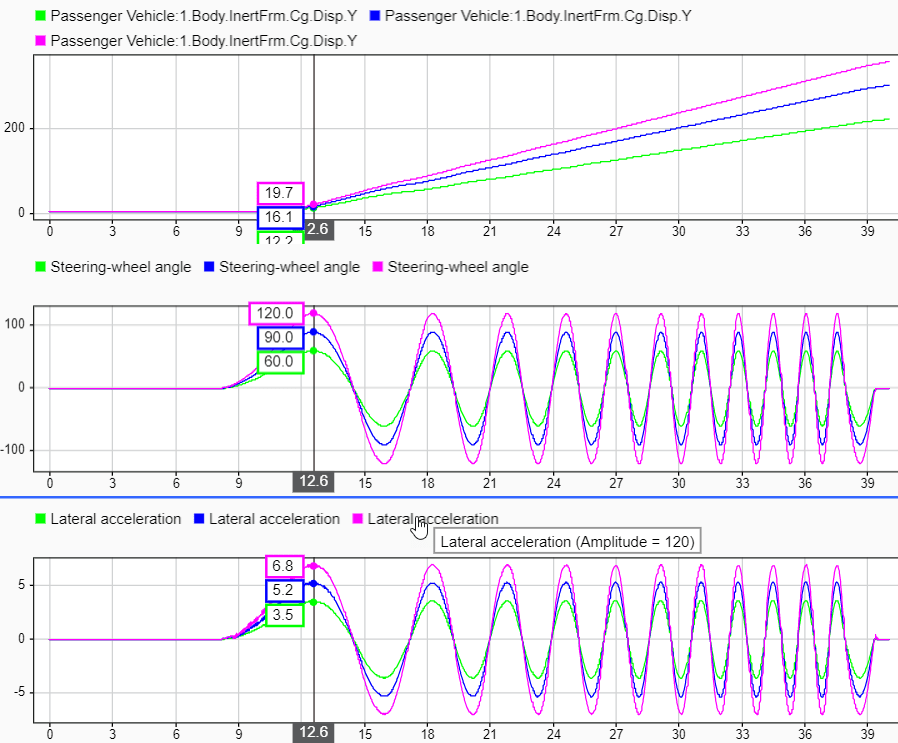
2。另外,使用这些MATLAB绘制数据为每个运行的命令。例如,使用这些命令绘制横向的位置,方向盘角度,横向加速度。结果类似于这些情节,显示每次运行的结果。
为idx = 1: numExperiments%创建sdi运行对象simoutRun (idx)金宝app = Simulink.sdi.Run.create;simoutRun (idx) . name = (的振幅= 'num2str (amp (idx)));add (simoutRun (idx),“var”simout (idx));结束sigcolor = [0 1 0 0 0 1; 1 0 1];为idx = 1: numExperiments%提取横向加速度,位置,指导ysignal (idx) = getSignalByIndex (simoutRun (idx), 7);ysignal (idx)。LineColor = sigcolor ((idx):);ssignal (idx) = getSignalByIndex (simoutRun (idx), 247);ssignal (idx)。LineColor = sigcolor ((idx):);asignal (idx) = getSignalByIndex (simoutRun (idx), 255);asignal (idx)。LineColor = sigcolor ((idx):);结束金宝appSimulink.sdi。视图Sim金宝appulink.sdi.setSubPlotLayout (3,1);为idx = 1: numExperiments%绘制横向位置、转向角和横向加速度plotOnSubPlot (ysignal (idx), 1, 1, true);plotOnSubPlot (ssignal (idx)、2、1, true);plotOnSubPlot (asignal (idx)、3、1, true);结束
结果类似于这些情节,这表明,最大的横向加速度时转向振幅120年度。
进一步分析
进一步探索结果,使用这些命令提取横向加速度,转向角和车辆的轨迹simout对象。
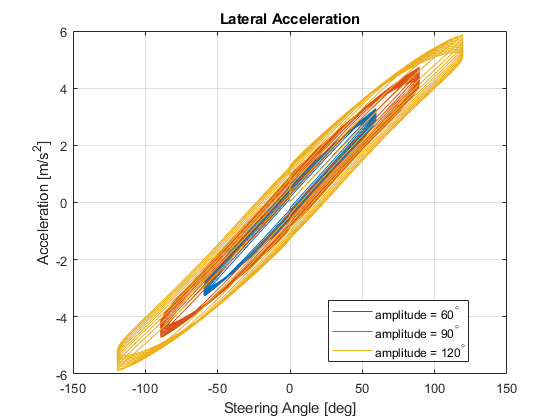
1。提取横向加速度和转向角。图数据。结果是类似的情节。
图为idx = 1: numExperiments%提取数据日志=得到(simout (idx),“logsout”);sa = log.get (“方向盘角”). values;唉= log.get (横向加速度的). values;legend_labels {idx} = [的振幅= 'num2str (amp (idx)),“^{\保监会}’];%的阴谋转向角和横向加速度情节(sa.Data ay.Data)在结束%将标签添加到情节传奇(legend_labels“位置”,“最佳”);标题(横向加速度的)包含(的转向角(度))ylabel (“加速度(m / s ^ 2)”网格)在
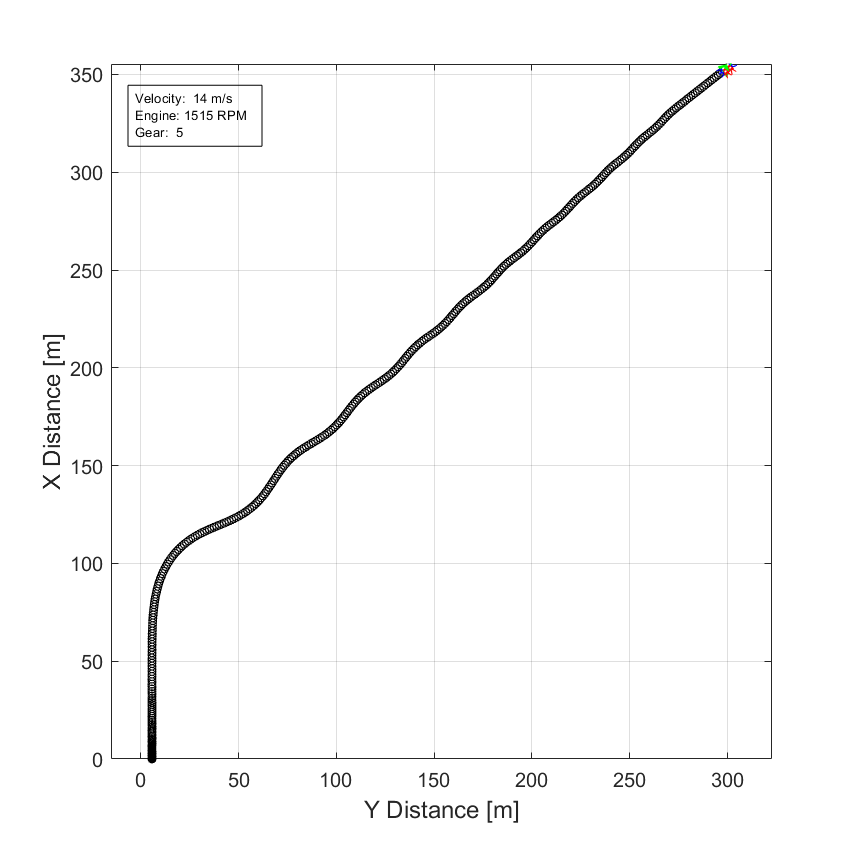
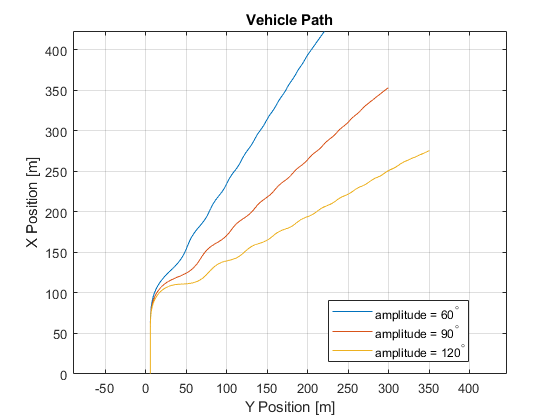
2。提取车辆路径。图数据。结果是类似的情节。
图为idx = 1: numExperiments%提取数据日志=得到(simout (idx),“logsout”);日志x = {1} .Values.Body.InertFrm.Cg.Disp.X.Data;日志y = {1} .Values.Body.InertFrm.Cg.Disp.Y.Data;legend_labels {idx} = [的振幅= 'num2str (amp (idx)),“^{\保监会}’];%绘制车辆位置轴(“平等”情节(y、x)在结束%将标签添加到情节传奇(legend_labels“位置”,“最佳”);标题(“车辆路径”)包含(“Y位置[m]”)ylabel (“X位置[m]”网格)在
另请参阅
金宝appSimulink.SimulationInput|金宝appSimulink.SimulationOutput|fft