在三维环境中进行车辆动力学机动
这个例子展示了如何在3D环境中运行车辆动力学机动。通过将车辆动力学模型与3D环境集成,您可以测试高级驾驶员辅助系统(ADAS)和自动驾驶(AD)感知、规划和控制软件。有关3D可视化引擎平台的要求和硬件建议,请参见虚幻引擎模拟环境的要求和限制.
创建并打开一个机动参考应用程序的工作副本。例如,打开双车道变道参考应用程序。
执行机动模拟。缺省情况下,3D环境是关闭的。
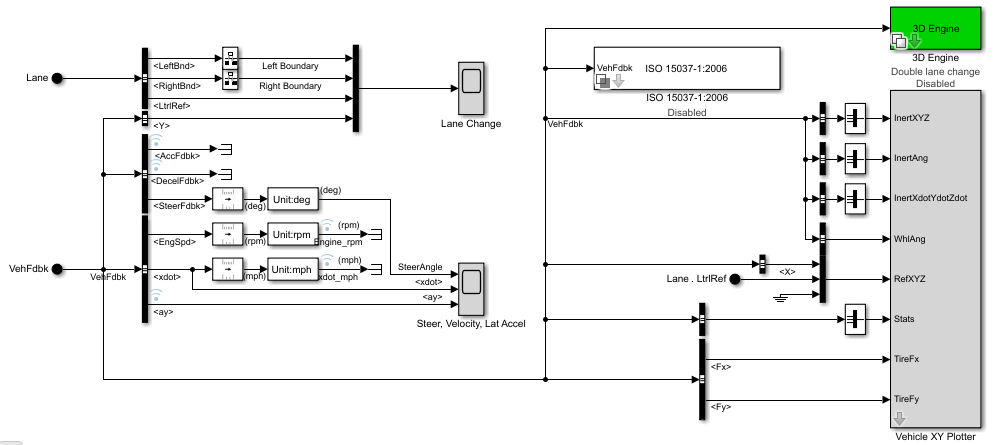
当您运行模拟时,可视化子系统将提供驾驶员、车辆和响应信息。参考应用程序记录机动过程中的车辆信号,包括转向、车辆和发动机速度,以及侧向加速度。您可以使用仿真数据检查器来导入记录的信号并检查数据。
元素 描述 司机命令
司机命令:
手轮角
加速命令
制动命令
车辆响应
汽车反应:
发动机转速
车辆速度
加速命令
车道改变范围块
车辆横向位移与时间:
红线-标志右车道界线的锥
橙色线-锥标志左车道边界
蓝线-参考轨迹
绿线-实际轨迹
转向,速度,加速度范围块
SteerAngle-转向角度与时间< xdot >-纵向车辆速度与时间<啊>-横向加速度与时间
车辆XY绘图仪
车辆纵向与横向距离
ISO 15037 - 1:2006块
在仿真数据检查器中显示ISO标准测量信号,包括方向盘角度和扭矩,纵向和横向速度,侧滑角
启用3D可视化环境。在可视化子系统中,打开3 d引擎块。设置这些参数。
3 d引擎来启用.
场景描述例如,对其中一个场景
双车道改变.
在场景中定位车辆:
选择位置初始化方法:
建议现场-将初始车辆位置设置为场景中推荐的值
用户指定的-设定自己的初始位置
点击使用初始值更新模型工作区使用应用的值覆盖模型工作区中车辆的初始位置。
重新运行引用应用程序。在模拟运行时
AutoVrtlEnv窗口,查看车辆响应。要流畅地改变相机视图,请使用以下关键命令。
关键 相机视图 1
左后
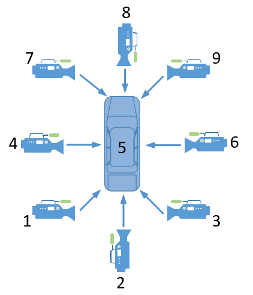
2
回来
3.
回到正确的
4
左
5
内部
6
正确的
7
前左
8
前面
9
前右
0
开销
对于额外的相机控制,使用这些关键命令。
关键 相机控制 选项卡 在场景中的所有车辆之间循环视图。
鼠标滚轮
控制摄像机与车辆的距离。
l
开启或关闭相机延迟效果。当你启用延迟效果,相机视图包括:
位置滞后,基于车辆平移加速度
旋转滞后,基于车辆的旋转速度
这种延迟可以改善整体车辆加速和旋转的可视化。
F 切换免费拍照模式或关闭。当您启用免费相机模式时,您可以使用鼠标来改变相机的俯仰和偏航。在这种模式下,你可以让相机围绕飞行器运行。
例如,当你运行双车道变道机动时,使用摄像头来观察车辆的变道情况。
回来

前左

内部

请注意
打开和关闭
AutoVrtlEnv窗口,使用Simulink金宝app®运行和停止按钮。如果手动关闭AutoVrtlEnv窗口时,Simu金宝applink将以错误停止模拟。当启用3D可视化环境时,不能将模拟后退。








相关的话题
你也可以从以下列表中选择一个网站: