主要内容
使用PI控制器设计级联控制系统
此示例显示如何使用PIDTune命令设计具有两个PI控制器的级联控制循环。
级联控制简介
级联控制主要用于在传播到植物的其他部分之前实现快速拒绝干扰。最简单的级联控制系统涉及两个控制环(内部和外部),如下框图所示。

控制器C1在外回路中是主控制器,对主被控变量进行调节日元通过设置内环的设定值。控制器C2在内环是次级控制器,拒绝扰动d2在它宣传之前在本地P1.串级控制系统要想正常工作,内环的响应速度必须比外环快得多。
在这个例子中,你将设计一个带有PI控制器的单回路控制系统和一个带有两个PI控制器的串级控制系统。比较了两种控制系统在参考跟踪和抗干扰方面的响应。
植物
在这个例子中,内环植物P2是
外环植物P1是
p2 = zpk([], - 2,3);P1 = ZPK([],[ - 1 -1 -1],10);
基于PI控制器的单回路控制系统设计
使用Pidtune.命令为整个工厂模型P = P1 * P2设计一个标准形式的PI控制器。

所要求的开环带宽为0.2 rad/s,大致对应于10秒的响应时间。
%植物模型为P = P1*P2P = P1 * P2;%使用PID或PIDSTD对象来定义所需的控制器结构C = PIDSTD(1,1);调谐PI控制器的目标带宽为0.2 rad/sc = pidtune(p,c,0.2);C
C = 11 Kp *(1 + ---- *——)Ti s带有Kp = 0.0119, Ti = 0.849标准形式的连续时间PI控制器
使用两个PI控制器设计级联控制系统
最好的做法是设计内环控制器C2首先,设计外环控制器C1内环闭合。在这个例子中,内环带宽被选择为2 rad/s,这比期望的外环带宽高10倍。为了得到一个有效的串级控制系统,内环的响应速度要比外环快得多。
以2 rad/s的开环带宽调整内环控制器C2。
C2 = PidTune(P2,PIDSTD(1,1),2);C2
C2 = 1 1 Kp *(1 + ---- *——)Ti s带有Kp = 0.244, Ti = 0.134标准形式的连续时间PI控制器
以与单环系统相同的带宽调整外环控制器C1。
%内环系统时,控制回路是先关闭clsys =反馈(P2 * C2, 1);%外环控制器C1所看到的Plant为clsys*P1C1 = pidtune (clsys * P1, pidstd (1, 1), 0.2);C1
C1 = 1 1 Kp *(1 + ---- *——)Ti s带有Kp = 0.015, Ti = 0.716的标准形式的连续时间PI控制器
性能比较
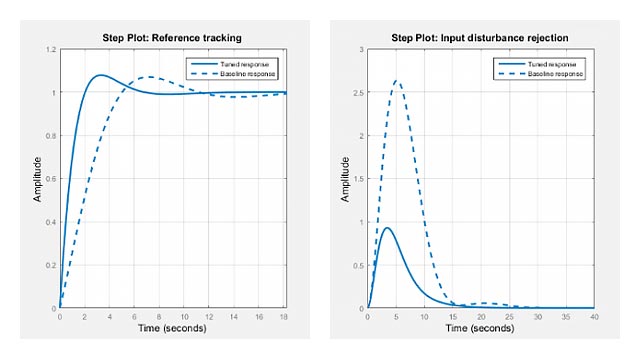
首先,绘制两种控制系统的步进参考跟踪响应。
%单环系统用于参考跟踪sys1 =反馈(p * c,1);sys1.name ='单回路';%级联系统供跟踪参考sys2 =反馈(clsys * p1 * c1,1);sys2.name =.“级联”;%绘图步骤响应图;步骤(sys1,“r”sys2,“b”)传说(“显示”,“位置”,'东南')标题('参考跟踪')

其次,绘制d2对两个控制系统的阶跃抗扰响应曲线。
%拒绝d2的单回路系统sysd1 =反馈(P1, P2 * C);sysd1。Name ='单回路';%级联系统拒绝d2SYSD2 = P1 /(1 + P2 * C2 + P2 * P1 * C1 * C2);sysd2.name =.“级联”;%绘图步骤响应图;步骤(sysd1,“r”sysd2,“b”)传说(“显示”)标题(“抗干扰”)

从这两个响应图可以看出,串级控制系统在抵制干扰方面表现得更好,而设定点跟踪性能几乎相同。
另请参阅
相关话题
您还可以从以下列表中选择一个网站: