模型预测控制工具箱
ProgettazioneËsimulazione二控制器predittivi basatiスMODELLI
模型预测控制工具箱™梅特一个disposizione funzioni,un'appēblocchi的Simulink金宝app®根据控制器的模拟和预测模型(MPC)的线性和非线性。我的工具箱里有一些特殊的模型,可以用来干扰其他的东西。对控制器的拟合与拟合,è控制器的可能预估值。
这是我们的控制器può的便条,我想和他在一起。我的工具箱里有一个可供分配的可供个性化使用的可供选择的工具。每个控制器是一个impianto非线性的,è可能的实现控制器MPC adattativi,增益调度非线性。根据我们的应用频率来提升,我们的工具箱一致同意一个控制器预测一个模型,一个控制器的部分,我们的实现是一个近似的解决方案。
根据一个嵌入的程序,可以使用一个嵌入的程序,可以使用这个程序,可以使用这个程序,可以使用IEC 61131-3。金宝app
Inizia奥拉:


Scheda TECNICA,包括免费
在Simulink中实现巡航控制系统金宝app
应用MPC设计师
Progetta控制器MPC在modo interattivo定义联合国国际关系模型我喜欢吃葡萄,我喜欢喝葡萄。验证控制器是否利用模拟场景。对抗più控制器MPC。

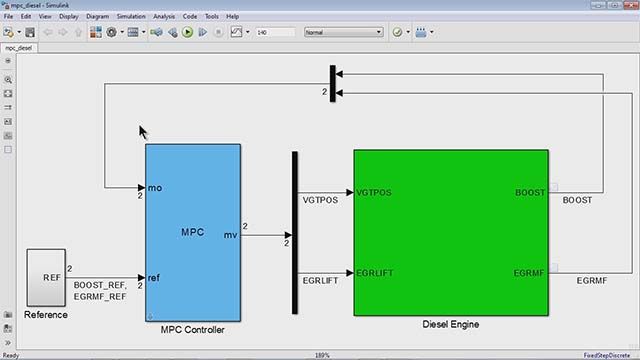
Progettazione MPC在Sim金宝appulink
在Simulink中,我们使用了MPC工具箱中的MPC控制器模型。金宝app对于平衡线性化的操作,我们有一个模拟的Simulink,每一个模拟的中间线性化的模型是每一个控制器MPC的节奏不变的,我金宝app们有一个名义上的输入和输出的输入金宝appSimulink的控制设计™.
Progettazione MPC在MATLAB
美国funzioni一个里加二COMANDO每progettare控制器MPC。Definisci未MODELLO二impianto INTERNO,regola我PESI,我镣铐教堂Èaltri parametri DEI控制器。西穆拉拉risposta德尔SISTEMA广告anello chiuso每valutare乐prestazioni德尔控制器。

Progettazione二控制器MPC哒里加二COMANDO。
Blocchi predefiniti
美国我blocchi自适应巡航控制系统,车道保持辅助系统E路径跟踪控制系统来PUNTO迪partenza每拉图阿applicazione ADASËpersonalizza金正日PROGETTO在基地全部周二necessità。属codice戴blocchi predefiniti每un'implementazione苏veicolo。

为了更好地实现巡航控制,我们在金宝appSimulink中预先定义了巡航控制。
Applicazioni迪riferimento迪esempio
美国的应用程序可以将工作流程应用于控制程序MPC,并将其应用于自主控制程序。最重要的是,我们的应用程序可以在possibilità中建立模型,我们可以在fedeltà中多样化。

MPC线性
Progetta uncontroller MPC lineare specificando un modelo di impianto interno come sistema lineare tempo-invariante (LTI) creato con Control System Toolbox™,oppure linearizzando un modelo Simu金宝applink con Simulink Control Design。在另一种选择中,输入一个模型创建一个输入-输出数据的组成部分,系统识别工具箱™。

具体的模型是根据MPC线性规划的。
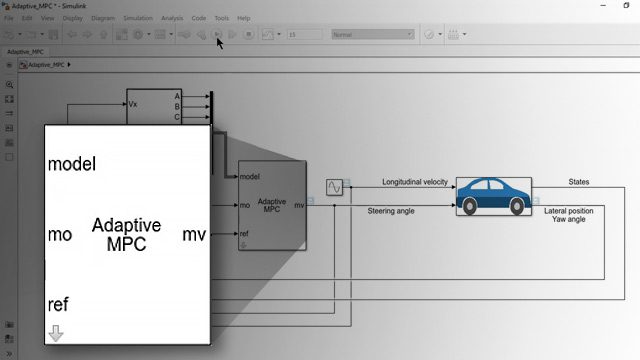
MPC adattivo
本文介绍了一种新型的自适应MPC控制器。我们可以对输入控制器进行建模。美国Kalman线性变量速度(LTV)的滤液,根据我们的预测模型,对我们的模型进行积分。
MPC gain-scheduled
多MPC控制器在单变量条件下的非线性控制。我们有一个控制器,我们有一个控制器,我们有一个控制器,我们有一个控制器。

Uso del blocco多MPC控制器每个程序控制器MPC增益计划。
Parametri德尔控制器
DOPO AVER definito IL MODELLO二impianto INTERNO,completa IL PROGETTO德尔陀控制器MPC specificando IL节奏二campionamento,GLI orizzonti二controlloëpredizione,我法托里二阶,我镣铐教堂二输入端E输出为e i PESI。伊尔工具箱suppor金宝appta anche IL软化代镣铐教堂OLTRE一个PESIê镣铐教堂variabili NEL速度。

MPC设计器的具体参数控制器。
Stima dello stato
在基准输出中,控制器的信号量利用信号量的积分。另一种选择是,美国根据每个人的标准制定个性化算法。

Stima personalizzata报stato。
Analisi DEI PROGETTI
对于控制器MPC,我们可能存在的问题是诊断积分。在运行时,如果控制器发生错误,美国可以对控制器进行操作。

Miglioramento德拉progettazione德尔控制器山岛我suggerimenti derivanti DAL报告迪analisi progettuale。
运行时的参数
在运行时间内,我们可以使用MPC控制器,在运行时间内,我们可以使用MPC控制器。在MATLAB中实现了控制器在运行时sia的控制®CHE在Sim金宝appulink。

Regolazione di pesi e vincoli in fase di runtime。
Monitoraggio阿尔prestazioni在运行时
我们可以看出,在不收敛的情况下,很少出现这种情况。美国希望通过控制和备份的战略来获取信息。

控制器的速度误差。
MPC esplicito
一般联合国控制人员MPC认为这是一个与MPC相关的项目的一部分。Semplifica联合国控制器MPC esplicito Generator每个联合国足迹的内存大小。

第一代控制器MPC是一个隐含于先例的控制器的部分。
Soluzione approssimata (sub-ottimale)
在最坏情况下执行时间(最坏情况执行时间)的模拟下,我们可以得到近似的结果(次最佳)。

面对最接近的时间(次最接近)。
Pianificazione ottimale
美国控制器MPC非线性根据一个更精确的应用于一个更精确的非线性模型和一个更精确的非线性模型。

本文介绍了一种基于MPC非线性控制的机器人。
在retroazione Controllo
在非线性的基础上建立了非线性的控制模型。根据impostazione predefinita, i控制器MPC非线性usano优化工具箱™,用于解决非线性编程问题。È anche可能的具体是一种非线性的个性化。

Controllo predittivo basato苏MODELLI非佛甲迪未reattore chimico esotermico。
MPC期中
Progetta controller MPC economi per ottimizzare il controller per unfunzto co任意在presenza di vincoli非线性任意。È可能我们是一个预测线性或非线性的模型,一个非线性的个性化或非线性的个性化。

Controllo MPC ECONOMICO每拉produzione迪ossido迪etilene。
本文采用MATLAB和Simulink进行仿真金宝app
Progetta un controller MPC in 金宝appSimulink e genera codice Co testo strutturato IEC 61131-3 usando rispettivamente Simulink Coder™o Simulink PLC Coder™。美国MATLAB编码器™每generare codice C在MATLAB e distribuiscilo每il controllo tempo realale。在替代,美国MATLAB编译器™每个pacchettizzare e condividere il tuo控制器MPC来单独应用。

Generazione二codiceÇDAL blocco MPC控制器。
Risolutori integrati
QP (programsolutori di programmaicone quadratica, QP)有效设置了嵌入程序的内部点。针对非线性问题,美国在优化工具箱中提出了一种拟合通用代码的二次规划方法(SQP)。分配代码是根据数字的任意处理生成的。

Risolutori integrati。
Risolutori personalizzati
美国非线性规划(NLP)Embotech力PRO QP每个模拟e通用编码每个控制器MPC线性或非线性。在另一种选择中,美国risolutori QP e NLP个性化根据不同的拟合和世代编码。

可根据拟合物和代合物进行个性化QP。