Hello. In this video, we will show how to design and simulate a digital control algorithm for power factor correction.
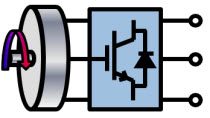
在这里,我们使用SIMSCAPE电气和Simulink的块对典型的活动功率因数校正设置进行了建模。金宝app让我们看一下模型的不同元素。我们有一个连接到二极管桥梁整流器的120V RMS的交流源。该整流器连接到数字控制的升压转换器,电阻载荷额定为400V。
We have modeled the digital control algorithm in this subsystem named Controls. We can see the algorithm is a cascaded control loop architecture. The outer loop controls the load voltage and the inner loop controls the inductor current.
我们的控制算法计算一个PWM信号,该信号驱动增压转换器的MOSFET。在此视频中,我们不会讨论被动组件的大小。我们将在模型中与已经有电感和电容的参数值一起工作,但是重要的是要注意,我们可以轻松更改这些值,运行仿真并观察变化。因此,我们可以使用此仿真模型为被动组件选择最佳参数值,但是我们的重点是数字控制算法。
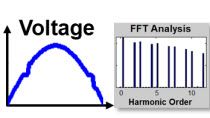
在此模型中,将控制器的PI收益设置为初始猜测。这些增益值不能提供最佳的功率因数校正。我们可以通过运行模型来看到这一点。在此图中,我们看到线电压为黄色,线电流为蓝色。当前的波形显示谐波的存在,从而导致功率因数较差。因此,我们需要重新调整控制器以进行更好的功率因数校正。
我们的工作流将如下:我们将首先调整内部循环,以获得当前循环的最佳PID增益。通过调整内部环,我们将调整外电压环以计算电压循环PI控制器的增益。
要进行调整,我们需要获得线性植物动力学模型。对于内部循环,我们需要从PWM占空比到电感电流获得动力学。我们将使用Simulink控制设计中的线性分析工具来做到这一点。金宝app使用此工具,我们可以通过进行AC扫描来估计模型的频率响应。我们需要围绕适当的工作点或偏置点进行此操作。要进行交流扫描,我们必须用直流源代替交流电压源。
该模型已设立为在其直流工作点运行,直流电压源为120V,稳态占空比为0.72 [AT1],以保持400V的恒定直流输出。
我们可以通过将这些信号分别标记为输入和输出线性化点来指定我们对从PWM占空比到电感电流的动力学感兴趣。模拟在约0.15秒处达到稳态,因此我们将在达到稳态时的起始频率响应估计。接下来,我们指定将固定的步骤流输入注入模型的样本时间为0.2微秒。我们将频率扫描范围从10Hz到15kHz,并将信号的幅度设置为0.036,以确保在操作范围内足够激发。我们选择此信号幅度足够小,以免我们离开操作点。
We then start the frequency response estimation. The model is simulated and the plant frequency response is computed. We will export it to the MATLAB workspace to use for the PI controller tuning.
在此下一步中,我们使用参考和测量的电感电流设置了控件子系统中的当前PI控制器,以在闭环中运行。
Next, we tune the gains of PI controller block by pressing the tune button in the block dialog. This launches the PID Tuner that tries to automatically linearize the plant. Because in this model we have discontinuities such as MOSFETs and PWM switching, the model cannot be linearized analytically. However, this is okay because this is exactly why we ran the frequency response estimation before. We can now simply point the PID Tuner to the estimated frequency response.
The PID Tuner uses this frequency response to compute PI gains to provide fast and stable closed-loop operation of the system. We can use the sliders to adjust the bandwidth and the phase margin. We will tune for the bandwidth of around 3.760 kHz and phase margin of 60 degrees to maintain a robust current reference tracking.
现在,我们可以采取计算的PI收益并在模型的PI块中更新它们。
通过调整内部电流循环,我们将重复该过程以调整外电压循环。在控件子系统中,此处1的常数块表示电感器电流请求。在我们的最终模型中,该信号将由外电压循环计算。因此,为了调整外循环,我们的输入线性化点是该信号,输出线性化点是输出电压信号。
该模拟在0.4秒左右达到稳态,因此我们将告诉线性分析工具以在那个时候开始频率响应估计。我们将固定的台阶正弦流信号样品时间设置为0.2微秒,其AC频率扫描范围从10Hz到5kHz。扰动的幅度设置为0.1,以确保足够的激发。现在,我们可以运行该工具并计算用于调整外循环的频率响应。
接下来,就像我们为内部循环所做的那样,我们将使用电压PI控制器设置外循环控件子系统,并通过启动PID调谐器开始调谐。同样,类似于我们为内部循环做的方式,我们导入先前估计的频率响应以计算PI增益。电压环比内电流环慢,因此我们将带宽设置为约55 Hz,并保持相位边缘在60度。使用此选定的带宽,控制器将遵循参考电压,同时拒绝整流AC源的120Hz振荡。
然后,我们使用计算的增益更新电压PI控制器。为了验证非线性模型中的性能,让我们在参考电压中进行步骤更改。仿真结果显示出强大的控制器性能。
现在,让我们将电压源切回原始的交流电网并运行仿真。
我们可以看到电感电流和输出电压轮廓显示出良好的参考跟踪。从AC网格绘制的线电流类似于完美的正弦曲线,并且比控制器调整之前的当前轮廓要好得多。我们看到谐波的减少,从而提供了更好的功率因素。
总而言之,在此视频中,我们展示了如何模拟,设计和调整用于Simulink中功率因数校正的数字控制算法。金宝app完成设计后,下一步将是生成从控件子系统的代码,以在嵌入式控制器上部署,以通过物理工厂进行测试。这是视频的结论。