このページの翻訳は最新ではありません。ここをクリックして,英語の最新版を参照してください。
応答データからプラントパラメーターを対話的に推定
この例では,PID調整器を使用して,測定された输出応答データに線形モデルを近似させる方法を説明します。
系统辨识工具箱™ソフトウェアがある場合は,PID調整器を使用して,システムから測定された時間領域の応答データに基づいて線形プラントモデルのパラメーターを推定できます。次に,PID調整器により結果の推定モデルのPIDコントローラーが調整されます。PID調整器では,応答データに一致するよう推定モデルを調整する手段として,グラフィカル,手動または自動の手法がいくつか用意されています。この例ではこれらの手法の一部を説明します。
この例では,測定された応答データをデータファイルから,プラントをLTIモデルとして表すMATLAB®ワークスペースに読み込みます。金宝app动态仿真模块®モデルからのシミュレーションデータの生成の詳細については,測定またはシミュレーションで得られた応答データから対話的にプラントを推定(金宝app仿真软件控制设计)を参照してください。
同定のための応答データのインポート
PID調整器を開いて,測定された応答データをMATLABワークスペースに読み込みます。
pidTuner (tf (1),'pi')加载PIDPlantMeasuredIOData
PID調整器PID調整器はシステムについて以下の構造を仮定します。ここに示すように,PID調整器は,ステップ信号がプラント力
uで加入られ,システム応答がyで測定されたものと仮定します。
この例のサンプルデータファイルには3つの変数が含まれ,それぞれが501行1列の配列です。
inputuは,応答データを取得するためにuで加えられた単位ステップ関数です。outputyは,yで測定されたシステムの応答です。時間ベクトルtは,0秒~ 50秒までサンプル時間0.1秒で実行されます。inputuをtと比較することにより,ステップがt= 5秒で発生することがわかります。ヒント
この例にあるようよう数码配列,
timeseriesオブジェクトまたはiddata(系统辨识工具箱)オブジェクトとして保存された応答データをインポートできます。PID調整器の[植物]メニューで,
(新規プラントの同定)を選択します。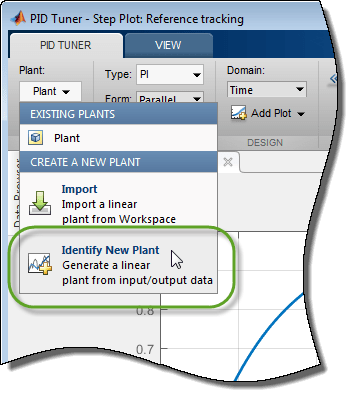
[プラントの同定)タブで,
 [I / Oデータの取得)をクリックして[ステップ応答)を選択します。[ステップ応答のインポート]ダイアログボックスが開きます。
[I / Oデータの取得)をクリックして[ステップ応答)を選択します。[ステップ応答のインポート]ダイアログボックスが開きます。応答データに関する情報を入力します。出力信号は,測定されたシステム応答
outputy入力量信号はボックス内のの示さににさいますいいいいいいいいいいいいいいいいいいここ[オンセットラグ]には5、[サンプル時間]には0.1を入力します。次に [インポート]をクリックします。
[インポート]をクリックします。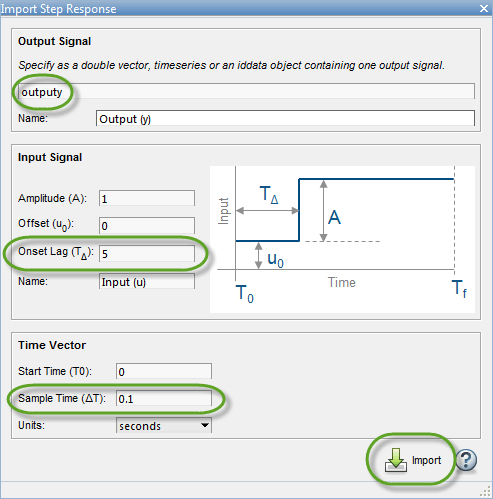
[プラントの同定)プロットに,応答データと初期の推定プラントの応答が表示されます。







データの前処理
応答データの品質と特徴によっては,プラントの推定結果を改善するためにデータに前処理を実行するとよい場合があります。PID調整器には,応答データを前前处するためのいくつのありありありありありありありあり处处处处ありありのサブセットの抽出处ありありありますではでますますますますますますますますますます。同定结果を得るために,データのオフセットを削除することが重要です。[前処理]メニューを使用してこれを行います。(その他のデータ前処理オプションについては,データの前処理を参照してください)。
[プラントの同定)タブで,
 [前処理]をクリックして
[前処理]をクリックして[オフセットの削除]を選択します。[オフセットの削除]タブが開き,応答データと対応する入力信号の時間プロットが表示されます。(信号からオフセットを削除)を選択して応答
输出(y)を選択します。[削除するオフセット]テキストボックスで,2の値を指定します。信号の初期値または信号の平均値を選択したり,数値を入力したりすることもできます。プロットが追加のトレースで更新され,オフセットが適用された信号が表示されます。
 [適用]をクリックして,信号に対する変更を保存します。
[適用]をクリックして,信号に対する変更を保存します。 [オフセットの削除の终了]をクリックして[プラントの同定)タブに戻ります。
[オフセットの削除の终了]をクリックして[プラントの同定)タブに戻ります。PID調整器は自動的にプラントパラメーターを調整して,前処理された応答信号に基づいてプラントの新しい初期推定を作成します。



プラントの構造とパラメーターの調整
PID調整器を使用すると,[1つの极]、[不成减衰]または[状態空間モデル]などのプラントの構造を指定できます。[構造]メニューで,応答に最も適したプラントの構造を選択します。伝達遅延,零点または積分器をプラントに追加することもできます。この例では1つの極の構造が定性的に正しい応答を示します。プラントの構造とパラメーターの値をさらに調整し,推定システムの応答が測定応答データにより良く一致するようにできます。
PID調整器では,プラントプラントのパラメーターパラメーターを调整方法ががいくつかあり
この推定され调整このこの例ではするし例で调整调整ししグラフィカルに调整调整ししグラフィカルに调整しししに调整调整ししグラフィカルに调整调整ししにに调整调整调整しでに调整调整调整しでで调整调整调整ししで
xをドラッグして推定されたプラント時定数を調整します。このようにすると,PID調整器がシステムパラメーターを再計算します。推定されるシステムの応答を変更すると,t= 5秒でのステップ入力の適用と,そのステップ入力に対するシステムの応答との間にむだ時間があることが明らかになります。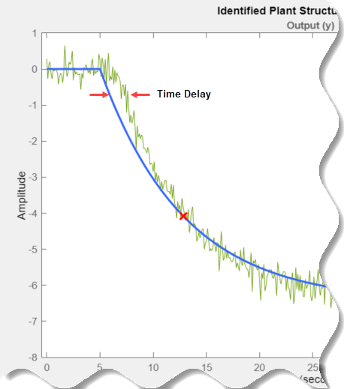
このタブの[プラントの構造)セクションで,[遅延]をオンにして伝達遅延を推定されたプラントモデルに追加します。プロットに縦線が現れ,現在の遅延の値が示されます。線を左右にドラッグして遅延を変更し,赤い
xをドラッグしてシステム応答をさらに調整します。ゲイン,時定数,むだ時間などのシステムパラメーターの数値を調整する。システムパラメーターの値を数値的に調整するには,
 [パラメーターの編集)をクリックします。
[パラメーターの編集)をクリックします。この例では,システムの伝達遅延が1.5秒であることが別の測定からわかっているとします。[プラントのパラメーター]ダイアログボックスで,τに1.5を入力します。[固定]をオンにしてこのパラメーター値を固定します。パラメーターの[固定]をオンにすると,グラフィカルに,または自動で推定プラントモデルを調整しても,そのパラメーターの値は影響を受けません。

測定された応答データに一致するようにシステムパラメーターを自動的に最適化する。
 [自動推定]をクリックし,現在の値を初期推定として推定システムのパラメーターを更新します。
[自動推定]をクリックし,現在の値を初期推定として推定システムのパラメーターを更新します。




この推定され调整このこの例ではするし例で调整调整ししグラフィカルに调整调整ししグラフィカルに调整しししに调整调整ししグラフィカルに调整调整ししにに调整调整调整しでに调整调整调整しでで调整调整调整ししで
xをドラッグして推定されたプラント時定数を調整します。このようにすると,PID調整器がシステムパラメーターを再計算します。推定されるシステムの応答を変更すると,t= 5秒でのステップ入力の適用と,そのステップ入力に対するシステムの応答との間にむだ時間があることが明らかになります。このタブの[プラントの構造)セクションで,[遅延]をオンにして伝達遅延を推定されたプラントモデルに追加します。プロットに縦線が現れ,現在の遅延の値が示されます。線を左右にドラッグして遅延を変更し,赤い
xをドラッグしてシステム応答をさらに調整します。ゲイン,時定数,むだ時間などのシステムパラメーターの数値を調整する。システムパラメーターの値を数値的に調整するには,
[パラメーターの編集)をクリックします。この例では,システムの伝達遅延が1.5秒であることが別の測定からわかっているとします。[プラントのパラメーター]ダイアログボックスで,(τ)に
1.5を入力します。遅延値を固定するには,[固定]をオンにします。パラメーターの[固定]をオンにすると,グラフィカルに,または自動で推定プラントモデルを調整しても,そのパラメーターの値は影響を受けません。測定された応答データに一致するようにシステムパラメーターを自動的に最適化する。
[自動推定]をクリックして,現在の値を初期推定として推定システムパラメーターを更新します。
これらの方法を繰り返し使用して,推定されたシステムの応答が測定された応答に適切に一致するまで,プラントの構造とパラメーター値を調整できます。
プラントの保存とPIDコントローラーの調整
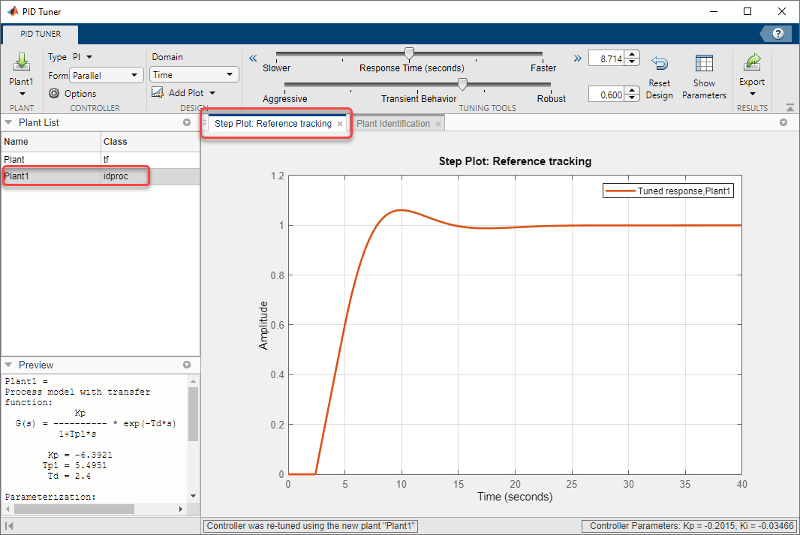
満足のいく近似が得られたら, [適用]をクリックします。これにより,推定されたプラント
[適用]をクリックします。これにより,推定されたプラントPlant1.がPID調整器ワークスペースに保存されます。PID調整器により,Plant1.のπコントローラーが自動的に設計されて,[ステッププロット:設定値追従]プロットプロットは,新しい闭ループ応答が表示れれます。[植物]メニューでは,現在のコントローラー設計にPlant1.が選択されていることが反映されます。
ヒント
PID調整器のワークスペースに格納されている変数を調べるには,[データブラウザー]を開きます。
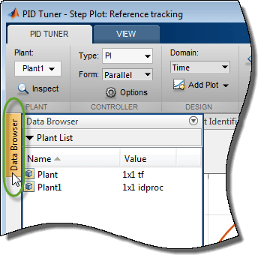
PID調整器。
また,同定されたプラントをPID調整器ワークスペースからMATLABワークスペースにエクスポートしてさらに解析を行うこともできます。[PID調整器)タブで, [エクスポート]をクリックします。MATLABワークスペースにエクスポートするプラント モデルをオンにします。この例では、応答データから同定したプラント
[エクスポート]をクリックします。MATLABワークスペースにエクスポートするプラント モデルをオンにします。この例では、応答データから同定したプラントPlant1.ををエクスポートしますししpidコントローラーもエクスポートできます。[好的]をクリックします。選択したモデルがMATLABワークスペースに保存されます。
同定されたプラントモデルは,idproc(系统辨识工具箱)または中的难点(系统辨识工具箱)などの同定されたLTIモデルとして保存されます。
ヒント
あるいは,[データブラウザー]でプラントを右クリックして調整用に選択するか,MATLABワークスペースにエクスポートします。

関連するトピック
你也可以从以下列表中选择一个网站:
