。
pidtune
线形プラントモデルのためのPID调整アルゴリズム
構文
C = pidtune (sys、类型)
C = pidtune (sys, C0)
C = pidtune(SYS,类型,WC)
C = PidTune(SYS,C0,WC)
C = pidtune(SYS,...,OPTS)
[C,信息] = pidtune(...)
説明
C= pidtune (SYS.,类型)SYS.用に类型タイプのPIDコントローラーを设计します。类型で1自由度(1-DOF)のPIDコントローラーを指定した场合,コントローラーは次に示すような単一フィードバックループ用に设计されます。

类型で2自由度(2- DOF)のPIDコントローラーを指定した场合,pidtuneによって次の図のフィードバックループのような二自由度コントローラーが设计されます。

pidtuneはPIDコントローラーCのパラメーターを调整し,パフォーマンス(応答时间)とロバスト性(安定余裕)のバランスを取ります。
C= pidtune (SYS.,C0)C0と同じタイプと形式をもつコントローラーを设计します。SYS.とC0が离散时间モデルの场合,CはC0と同じ離散積分器の式をもちます。
C= pidtune (SYS.,类型,厕所)C= pidtune (SYS.,C0,厕所)厕所を指定します。
C= pidtune (SYS.,......,选择)pidtuneOptionsを使用して,オプションセット选择を指定します。
[はデータ構造体C,信息] = pidtune(…)信息を返しますが,これには闭ループ安定性,选択した开ループゲイン交差周波数,実际の位相余裕に关する情报が含まれています。
入力数
|
単入力単出力のコントローラー设计のプラントの動的システムモデル。
プラントが不安定な極をもっている,および
その場合,不安定な極があれば, |
|
設計するコントローラーのコントローラータイプ。文字ベクトルとして指定します。“コントローラータイプ”という用语は,コントローラーの动作内に存在する项を示します。たとえば,PIコントローラーにあるのは比例项と积分项のみですが,PIDFコントローラーには比例项,积分器项,不完全微分项があります。 1-DOFコントローラー
二自由度コントローラー
二自由度PIDコントローラー一般についての詳細は,2自由度PIDコントローラーを参照してください。 設定点の重みが固定された二自由度コントローラー
設定点の重みが固定された二自由度PIDコントローラーについての詳細は,调整におけるPIDコントローラータイプを参照してください。 コントローラー形式
PIDコントローラーの形式と公式についての詳細は,次を参照してください。 |
|
设计されるコントローラーのPIDコントローラー设定プロパティ。
|
|
調整された開ループ応答の0分贝ゲイン交差周波数のターゲット値。
|
|
ターゲットの位相余裕や设计フォーカスなど, |
出力数
|
コントローラー形式: コントローラータイプ:
ただし,どちらの场合でも, 时间领域:
|
|
调整されたPIDループの性能とロバスト性に关する情报を含むデータ构造体。
|
例
コマンドラインでのPIDコントローラーの设计
この例では,以下で与えられるプラントのPIDコントローラーを设计する方法を说明します。
第1段阶として,プラントのモデルを作用成し,このこのモデルの単纯ななをを设计しし
SYS = ZPK([],[ - 1 -1 -1],1);[C_pi,信息] = pidtune(SYS,'PI')
C_pi = 1 Kp + Ki *——s, Kp = 1.14, Ki = 0.454并联形式的连续时间PI控制器。
信息=结构体字段:稳定:1 CrossoverFrequency:0.5205 PhaseMargin:60.0000
C_piはπコントローラーを表すpidコントローラーオブジェクトです。信息のフィールドは,調整アルゴリズムが約0.52 rad / sの開ループ交差周波数を選択することを示しています。
コントローラーシステムの闭ループのステップ応答(设定値追従)を调べます。
T_pi = feedback(C_pi*sys, 1);步骤(T_pi)

応答時間を改善するために,pidtune0.52が自動的に選択するという結果よりも高いターゲット交差周波数を設定できます。1.0交差周波数をに上げます。
[C_pi_fast,信息] = pidtune(SYS,'PI', 1.0)
C_pi_fast = 1的Kp +的Ki * --- S采用的Kp = 2.83,奇并联形式= 0.0495连续时间PI控制器。
信息=结构体字段:稳定:1 CrossoverFrequency:1 PhaseMargin:43.9973
新しいコントローラーはより高い交差周波数を実現しますが,それにより位相余裕は小さくなります。
闭ループステップ応答を2つのコントローラーと比较します。
T_pi_fast =反馈(C_pi_fast * sys, 1);step(T_pi,T_pi_fast)轴([0 30 0 1.4])图例('PI',“π,快”)

この性能低下は,PIコントローラーに1.0弧度/秒の交差周波数で十分な位相余裕を得るだけの自由度がないことにより起こります。微分动作を追加することで,応答を向上させることができます。
ターゲット交差周波数1.0弧度/秒をもつGcのためのPIDFコントローラーを設計します。
[C_pidf_fast,信息] = pidtune(SYS,“PIDF”, 1.0)
C_pidf_fast = 1秒的Kp +的Ki * --- + Kd *是--------小号TF * S + 1的Kp = 2.72,奇= 0.985,Kd值在1.72,TF = 0.00875连续时间PIDF控制器在并行形式。
信息=结构体字段:稳定:1交叉频率:1相位裕度:60.0000
信息のフィールドは,调整アルゴリズムが,コントローラーの微分动作により,十分な位相余裕のあるターゲット交差周波数を达成する,アグレッシブなコントローラーを设计できることを示しています。
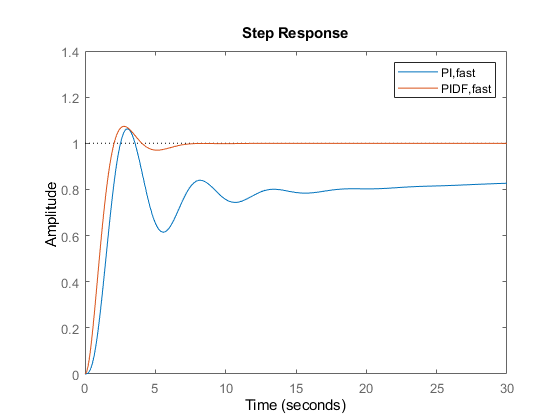
閉ループステップ応答と外乱の抑制を,πとPIDFの高速コントローラーで比較します。
T_pidf_fast =反馈(C_pidf_fast * SYS,1);步骤(T_pi_fast,T_pidf_fast);轴([0 30 0 1.4]);传奇(“π,快”,'PIDF,快');
コントローラーコントローラーのの力(読み込み)外乱の抑制を,piとpidfの高度コントローラーでうできます。これを行には,プラントプラントループからは出出の闭ループ达关键词
S_pi_fast =反馈(SYS,C_pi_fast);S_pidf_fast =反馈(SYS,C_pidf_fast);步骤(S_pi_fast,S_pidf_fast);轴([0 50 0 0.4]);传奇(“π,快”,'PIDF,快');

このプロットは,PIDFコントローラーが,より速い外乱の抑制を行うことも示しています。
标准形式PIDコントローラーの设计
次で定义されるプラントのPIDコントローラーを标准形式で设计します。
标准形式でコントローラーを设计するには,标准形式のコントローラーをpidtuneへのC0引数として使用します。
SYS = ZPK([],[ - 1 -1 -1],1);C0 = PIDSTD(1,1,1);C = pidtune (sys, C0)
C = 1 1 Kp *(1 + ---- *——+ Td * s) Ti s带有Kp = 2.18, Ti = 2.36, Td = 0.591的标准形式的连续时间PID控制器
积分器の离散化手法を指定する
積分器を離散化するために,指定されたメソッドを使用して離散時間πコントローラーを設計します。
プラントが离散时间の场合は,pidtuneは既定の前進オイラー法を使用して自動的に離散時間コントローラーを返します。別の積分手法を指定するには,pidまたはpidstdを使用して,目的の积分手法をもつ离散时间コントローラーを作成します。
Sys = c2d(tf([1 1],[1 5 6]),0.1);C0 = pid (1, 1,'ts', 0.1,“IFormula”,'BackwardEuler');C = pidtune (sys, C0)
C = Ts*z Kp + Ki * ------ z-1, Kp = -0.518, Ki = 10.4, Ts = 0.1采样时间:0.1秒并行形式离散时间PI控制器。
C0を入力して,pidtuneでC0と同じ形式,タイプ,離散化手法のコントローラーCを設計します。表示には,Cの積分項で後退オイラー法の積分法が示されます。
台形则积分器を指定し,作成されたコントローラーを比较します。
C0_tr = pid (1, 1,'ts', 0.1,“IFormula”,“梯形”);CTR = pidtune(SYS,C_tr)
Ctr = Ts*(z+1) Ki * -------- 2*(z-1) with Ki = 10.4, Ts = 0.1采样时间:0.1秒
2自由度PIDコントローラーの设计
伝達関数によって与えられるプラントの二自由度PIDコントローラーを設計します。
1.5ターゲット帯域幅はrad / sを使用します。
wc = 1.5;G = tf(1,[1 0.5 0.1]);C2 = pidtune (G,'pid2',厕所)
C2=1u = Kp (b*r-y) + Ki --- (r-y) + Kd*s (c*r-y) s with Kp = 1.26, Ki = 0.255, Kd = 1.38, b = 0.665, c = 0 Continuous-time 2-DOF PID controller in parallel form.
タイプ'pid2'を使用すると,pidtuneにより2-DOFコントローラーが生成され,pid2オブジェクトとして表現されます。表示によりこの結果を確認します。表示にはまた,pidtuneがすべてのコントローラー係数を,設定点の重みbおよびcを含めて调整し,性能とロバスト性のバランスを取っていることも示されます。
ヒント
既定では,
类型入力をもつpidtuneは,pidコントローラーを并列形式で返します。标准形式でコントローラーを设计するには,入力引数C0としてpidstdを使用します。并列および标准コントローラー形式の详细については,pidとpidstdのリファレンスページを参照してください。ライブエディターによる対話型のPID調整については,[PIDコントローラーの調整)ライブエディタータスクを参照してください。このタスクを使用すると,PIDコントローラーを対话的に设计し,ライブスクリプト用のMATLAB®コードを自動的に生成できます。
アルゴリズム
Mathworks.®PID调整アルゴリズムについての详细は,PID調整アルゴリズムを参照してください。
代替方法
ライブエディターによる対話型のPID調整については,[PIDコントローラーの調整)ライブエディタータスクを参照してください。このタスクを使用すると,PIDコントローラーを対话的に设计し,ライブスクリプト用のMATLABコードを自动的に生成できます。例については,ライブエディターでのPIDコントローラーの设计を参照してください。
スタンドアロンアプリによる対話型のPID調整には,PID調整器を使用します。アプリを使用したコントローラーの設計の例については、高速設定値追従用のPIDコントローラーの設計を参照してください。
参考文献
Åström, K. J.和Hägglund, T.先进的PID控制,研究三角园:仪器仪表,系统,自动化学会,2006。
参考
関数
アプリ
ライブエディタータスク
オブジェクト
你也可以从以下列表中选择一个网站:
