このページの翻訳は最新ではありません。ここをクリックして、英語の最新版を参照してください。
lu
行列の LU 分解
構文
説明
[___] = lu(___,は、outputForm)outputFormで指定した形式でPとQを返します。PとQを置換ベクトルとして返すには、outputFormを“向量”として指定します。前述の構文にある任意の入力引数の組み合わせが使用できます。
例
行列の LU 分解
行列の LU 分解を計算し、生成される因子を確認します。LU 分解は、行列 を、上三角行列 、下三角行列 、置換行列 に分解する手法です。このとき、 が成立します。これらの行列は、行列が行簡約階段形になるまでガウスの消去法を実行するために必要なステップを表します。行列 にはすべての乗算器が含まれます。また、置換行列 では行交換が考慮されます。
3 行 3 列の行列を作成し、LU 因子を計算します。
A = [10 -7 0 -3 2 6 5 -1 5];
[L,U] = lu(A)
L =3×31.0000 0 0 -0.3000 -0.0400 1.0000 0.5000 1.0000 0
U =3×310.0000 -7.0000 0 0 2.5000 5.0000 0 0 6.2000
これらの因子を乗算して、Aを再作成します。luは 2 入力の構文を使用して、置換行列Pを直接L因子に組み込みます。このとき、返されるLは実際にはP'*Lとなり、そのためA = L*Uとなります。
L*U
ans =3×310.0000 -7.0000 0 -3.0000 2.0000 6.0000 5.0000 -1.0000 5.0000
3 つの出力を指定して、置換行列をLの乗算器から分離することができます。
[L,U,P] = lu(A)
L =3×31.0000 0 0 0.5000 1.0000 0 -0.3000 -0.0400 1.0000
U =3×310.0000 -7.0000 0 0 2.5000 5.0000 0 0 6.2000
P =3×31 0 0 0 0 1 0 1 0
P'*L*U
ans =3×310.0000 -7.0000 0 -3.0000 2.0000 6.0000 5.0000 -1.0000 5.0000
LU 分解による線形システムの求解
LU 分解を実行し、因子を使用して問題を単純化することにより、線形システムを解きます。その結果を、バックスラッシュ演算子やdecompositionオブジェクトを使用した他の方法と比較します。
5 行 5 列の魔方陣行列を作成し、線形システム
を解きます。ここで、bのすべての要素が 65 (魔方陣の和) と等しくなります。65 はこの行列の魔方陣の和である (すべての行および列ではその和が 65 になる) ため、xについて予期される解は 1 から成るベクトルです。
A = magic(5); b = 65*ones(5,1); x = A\b
x =5×11.0000 1.0000 1.0000 1.0000 1.0000
一般的な正方行列では、バックスラッシュ演算子は LU 分解を使用して線形システムの解を計算します。LU 分解により、Aは三角行列の積として表され、三角行列を含む線形システムは代入式により簡単に解けます。
バックスラッシュにより計算された解を再作成するには、Aの LU 分解を計算します。その後、因子を使用して次の 2 つの三角線形システムを解きます。
y = L\(P*b); x = U\y;
線形システムを解く前に行列因子を事前計算するこの方法は、多数の線形システムを解く場合のパフォーマンスを向上させることができます。これは、因数分解の発生が 1 回のみで、繰り返しが不要なためです。
[L,U,P] = lu(A)
L =5×51.0000 0 0 0 0 0.7391 1.0000 0 0 0 0.4783 0.7687 1.0000 0 0 0.1739 0.2527 0.5164 1.0000 0 0.4348 0.4839 0.7231 0.9231 1.0000
U =5×523.0000 5.0000 7.0000 14.0000 16.0000 0 20.3043 -4.1739 -2.3478 3.1739 0 0 24.8608 -2.8908 -1.0921 0 0 0 19.6512 18.9793 0 0 0 0 -22.2222
P =5×50 1 0 0 0 1 0 0 0 0 0 0 0 0 1 0 0 1 0 0 0 0 0 1 0
y = L\(P*b); x = U\y
x =5×11.0000 1.0000 1.0000 1.0000 1.0000
decompositionオブジェクトも、特殊化された因数分解により線形システムを解く場合に便利です。この方法では、因子の使用方法の知識を求められることなく、行列因子の事前計算によるパフォーマンス上のメリットを数多く得られます。同じ結果を再作成するには、タイプが'lu'の decomposition オブジェクトを使用します。
dA = decomposition(A,'lu'); x = dA\b
x =5×11.0000 1.0000 1.0000 1.0000 1.0000
スパース行列の LU 分解
スパース行列の LU 分解を計算して、恒等式L*U = P*S*Qを検証します。
Buckminster-Fuller 幾何ドームの結合グラフの 60 行 60 列のスパース隣接行列を作成します。
S = bucky;
4 つの出力をもつスパース行列構文を使用してSの LU 分解を計算し、行と列の置換行列を返します。
[L,U,P,Q] = lu(S);
Sの行と列をP*S*Qと置換した結果を、三角因子L*Uを乗算した場合と比較します。1 ノルムの違いは、丸め誤差の範囲に入り、L*U = P*S*Qを示します。
e = P*S*Q - L*U; norm(e,1)
ans = 5.7732e-15
置換ベクトルを使用してメモリを節約
行列の LU 分解を計算します。行置換を行列ではなくベクトルとして返すことで、メモリを節約します。
1000 行 1000 列のランダム行列を作成します。
A = rand(1000);
行列Pとして保存されている置換情報を使用して LU 分解を計算します。結果を、ベクトルpとして保存されている置換情報と比較します。行列が大きいほど、置換ベクトルを使用した場合にメモリ効率がより高くなります。
[L1,U1,P] = lu(A); [L2,U2,p] = lu(A,“向量”); whosPp
Name Size Bytes Class Attributes P 1000x1000 8000000 double p 1x1000 8000 double
また、置換ベクトルを使用すると、以降の操作の実行時間が短縮されます。たとえば、前述の LU 分解を使用して、線形システム を解くことができます。置換ベクトルから得られる解と置換行列から得られる解は等価 (丸めを除く) ですが、通常は、置換ベクトルを使用して解を求める方が時間がやや短縮されます。
スパース行列の因数分解の非スパース要素を減らす
スパース行列の LU 分解の計算結果を、列置換がある場合と列置換がない場合で比較します。
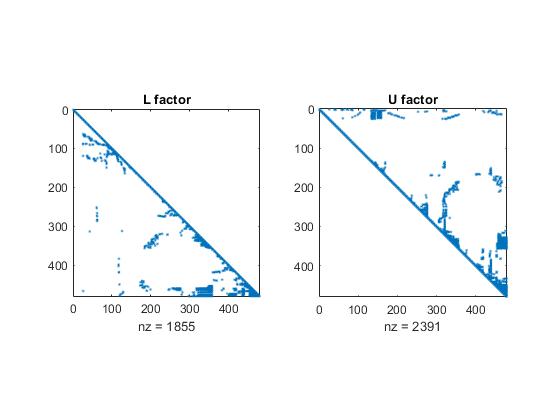
行列west0479を読み込みます。これは 479 行 479 列の実数値のスパース行列です。
loadwest0479A = west0479;
3 つの出力を指定してluを呼び出し,Aの LU 分解を計算します。L 因子と U 因子の spy プロットを生成します。
[L,U,P] = lu(A); subplot(1,2,1) spy(L) title('L factor') subplot(1,2,2) spy(U) title('U factor')

次に、4 つの出力を指定してluを使用し、Aの LU 分解を計算します。これにより、Aの列が置換され、各因子について非ゼロの数が少なくなります。この結果生成される因子は、列置換を使用しない場合と比べて、スパースの傾向が強くなっています。
[L,U,P,Q] = lu(A); subplot(1,2,1) spy(L) title('L factor') subplot(1,2,2) spy(U) title('U factor')
入力引数
出力引数
アルゴリズム
LU 分解は、ガウスの消去法の変形を使用して計算されます。正確な解を計算できるかどうかは、元の行列の条件数の値cond(A)によって異なります。行列の条件数が大きい (ほぼ特異である) 場合、計算された因数分解は正確でないことがあります。
LU 分解は、invを使用して逆行列を求めたり、detを使用して行列式の値を求めるための重要な部分です。線形方程式の求解や、演算子\や/を使用した行列の除算に対しても基本的な役割を果たします。そのため、必然的に、これらの依存関数にもluの数値制限が存在することになります。
拡張機能
Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select:.
Selectweb siteYou can also select a web site from the following list:
Americas
- América Latina(Español)
- Canada(English)
- United States(English)
Europe
- Belgium(English)
- Denmark(English)
- Deutschland(Deutsch)
- España(Español)
- Finland(English)
- France(Français)
- Ireland(English)
- Italia(Italiano)
- Luxembourg(English)
- Netherlands(English)
- Norway(English)
- Österreich(Deutsch)
- Portugal(English)
- Sweden(English)
- Switzerland
- United Kingdom(English)
