Speed Measurement
Compute speed from rotor angular position
- Library:
Motor Control Blockset / Sensor Decoders
Description
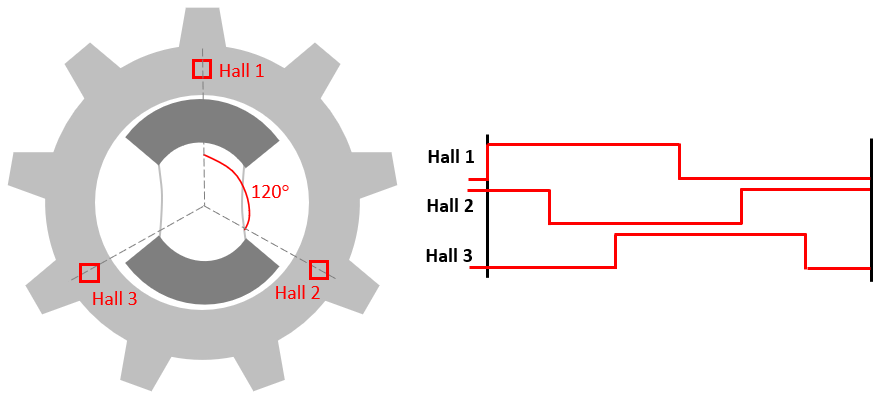
TheSpeed Measurementblock calculates the angular speed from the angular position of the rotor by calculating the change in the angular position with respect to time.
Ports
Input
Output
Parameters
Model Examples



Extended Capabilities
Version History
You can also select a web site from the following list:
Americas
- América Latina(Español)
- Canada(English)
- United States(English)
Europe
- Belgium(English)
- Denmark(English)
- Deutschland(Deutsch)
- España(Español)
- Finland(English)
- France(Français)
- Ireland(English)
- Italia(Italiano)
- Luxembourg(English)
- Netherlands(English)
- Norway(English)
- Österreich(Deutsch)
- Portugal(English)
- Sweden(English)
- Switzerland
- United Kingdom(English)