测试控制器鲁棒性
此示例显示如何使用模拟测试模型预测控制器对预测误差的灵敏度。
良好的做法是测试控制器的稳健性以预测错误。古典阶段和增益利润是量化SISO应用鲁棒性的一种方法。强大的控制工具箱™软件为MIMO系统提供了复杂的方法。运行模拟也有助于。
定义工厂模型
对于这个例子,使用CSTR模型使用MPC设计器设计控制器.
A = [-0.0285 -0.0014;-0.0371 - -0.1476);B = [-0.0850 0.0238;0.0802 - 0.4462);C = [0 1;1 0];D = 0 (2, 2);装运箱= ss (A, B, C, D);
指定设备的信号名称和信号类型。
cstr.InputName = {'t_c'那'c_a_i'};cstr.outputname = {'T'那'c_a'};cstr.statename = {'c_a'那'T'};装运箱= setmpcsignals(装运箱,'mv',1,“UD”,2,'莫',1,'uo',2);
开放MPC设计师,并导入工厂模型。
MPCDesigner(CSTR)
该应用程序导入工厂模型并将其添加到数据浏览器.它还创建了一个默认控制器和默认的仿真方案。
设计控制器
通常,您将通过指定缩放因子,定义约束和调整调整权重来设计控制器。对于此示例,修改控制器采样时间,并将其他控制器设置保持在其默认值。
in.MPC设计师,在这方面调整选项卡,地平线节中,指定一个采样时间的0.25秒。

当输入响应和输出响应绘图更新以反映新的采样时间。
配置模拟方案
为了测试控制器设定值跟踪和未测量干扰抑制,修改默认的仿真场景。
在数据浏览器,在场景部分,右键单击场景1,选择编辑.
在“模拟方案”对话框中,指定一个模拟持续时间的50.秒。
在参考信号表,保持默认值参考T.设定点配置,模拟反应器温度的单位步骤变化。
将浓度设定点保持在其标称值,在第二行中信号下拉列表,选择常数.
在25秒的时间内模拟一个单位阶跃未测量的扰动。在未训练的紊乱表,在信号下拉列表,选择step,并指定时间的25..
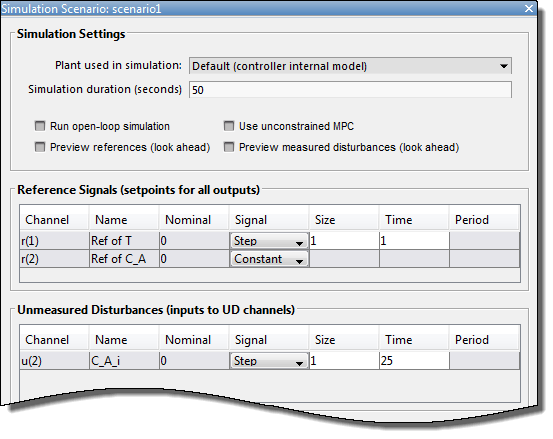
点击好吧.
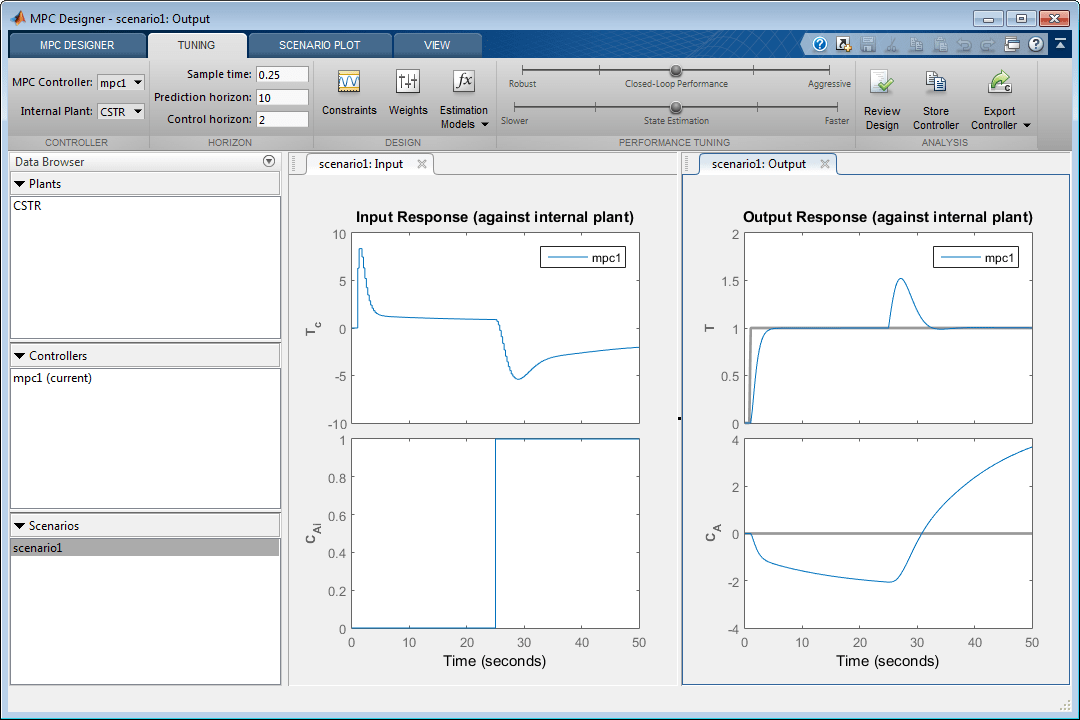
应用程序运行模拟场景,并更新响应图以反映新的模拟设置。对于这种情况,仿真中使用了控制器的内部模型。因此,仿真结果代表了控制器在无预测误差时的性能。
定义扰动植物模型
假设你想要测试你的控制器对电站变化的敏感性,这些变化修改了冷却剂温度对反应堆温度的影响。你可以通过扰动元素来模拟这种变化B(2,1)的输入状态矩阵。
在MATLAB®命令窗口,指定扰动矩阵。
dB = [0 0;0.05 0];
创建两个扰动的工厂模型。
perturbup = cstr;perturbup.b = perturbup.b + db;Perturbdown = Cstr;perturbdown.b = perturbdown.b - db;
检查受干扰植物的阶跃反应
为了检验植物扰动的影响,绘制植物阶跃响应图。
步骤(装运箱,perturbUp perturbDown)传说('cstr'那“peturbUp”那“perturbDown”)

扰动元素B(2,1)CSTR厂的变化改变反应器温度的响应的幅度,T.,冷却剂温度的变化,TC..
进口扰乱植物
in.MPC设计师,在这方面MPC设计师选项卡,进口部分,点击进口工厂.
在“导入工厂模型”对话框中,选择erburbup.和erburbdown.模型。
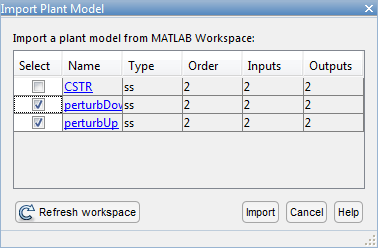
点击进口.
该应用程序导入模型并将其添加到数据浏览器.
定义扰动植物仿真方案
创建两个使用扰动工厂模型的模拟场景。
在数据浏览器,在场景节中,双击场景1,重命名它准确.
右键单击准确,然后点击复制.重命名准确_Copy.到目前为止错误.
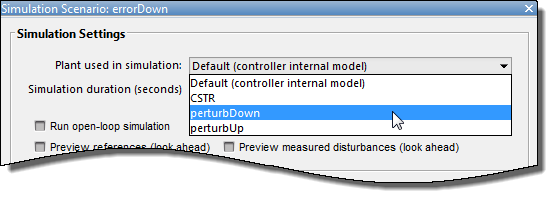
右键单击错误,选择编辑.
在“模拟方案”对话框中,在模拟使用的设备下拉列表,选择erburbup..

点击好吧.
重复第二个扰动植物的这个过程。
复制准确场景并将其重命名为误操作.
编辑误操作,选择erburbdown.植物。
审查错误模拟反应
在这一点MPC设计师选项卡,场景部分,点击情节场景>错误.

该应用程序创建错误:输入和errorUp:输出选项卡,并显示模拟响应。
查看准确和错误响应并排,拖动准确:输出选项卡进入左侧绘图面板。

扰动会产生一种植物,erburbup.,这响应了比控制器预测的操纵变换更快。在这一点errorUp:输出选项卡,输出响应情节,这T.设定点响应具有大约10%的过冲,具有更长的稳定时间。虽然这种反应比对的反应差准确模拟,它仍然可以接受。由于未测量的干扰,较快的植物响应导致较小的峰值误差。总的来说,控制器能够控制erburbup.尽管内部模型预测存在误差,但仍然成功Plant。
审查误操作模拟反应
在这一点MPC设计师选项卡,场景部分,点击情节场景>误操作.
该应用程序创建errordown:输入和errordown:输出选项卡,并显示模拟响应。
查看准确和误操作响应并排,单击准确:输出选项卡在左侧显示面板中。
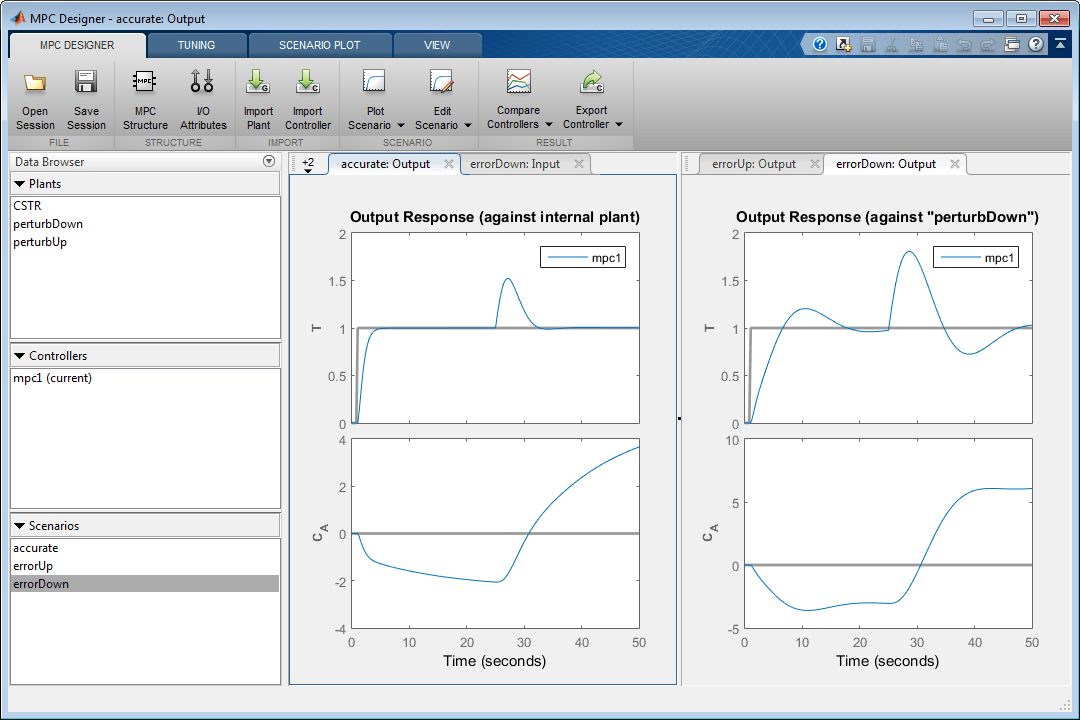
扰动会产生一种植物,erburbdown.它对操纵变量变化的反应比控制器预测的要慢。在这一点errordown:输出选项卡,输出响应情节,设定点跟踪和扰动抑制比未受干扰的植物更糟糕。
根据申请要求和这种植物改变的现实世界潜力,对此的退化响应erburbdown.工厂可能需要修改控制器设计。
另请参阅
相关的话题
你也可以从以下列表中选择一个网站:
