このページの翻訳は最新ではありません。ここをクリックして,英語の最新版を参照してください。
モデルコンポーネントの作成
システムの要件を集めるときに,モデルコンポーネントを特定します。不完全な指定であっても,コンポーネントのインターフェイスが存在する場所を特定できます。
シミュレーション結果に影響を与えたり,変更される可能性のあるインターフェイスを指定せずにモデルコンポーネントを定義するには,サブシステムを作成し,モデルを視覚的に整理します。
デジタルコントローラーなど一部のコンポーネントは,モデル内で単一ユニットとして実行されます。既知の境界をもつこれらのスタンドアロンコンポーネントの場合,原子子系统を使用できます。アトミックコンポーネントを事前に定義しておくと,スタンドアロンコードを生成するときに,コストの高いリファクタリングを回避できます。
モデルex_modeling_componentsには4つの一般的なモデルコンポーネントが含まれます。
機械システム——バネとダンパーによって表面から分離される質量
コントローラー——機械システムの動きを制御するアルゴリズム
オペレーター——コントローラーに送信されるコマンドを定義するロジック
環境——機械システムに影響する外乱
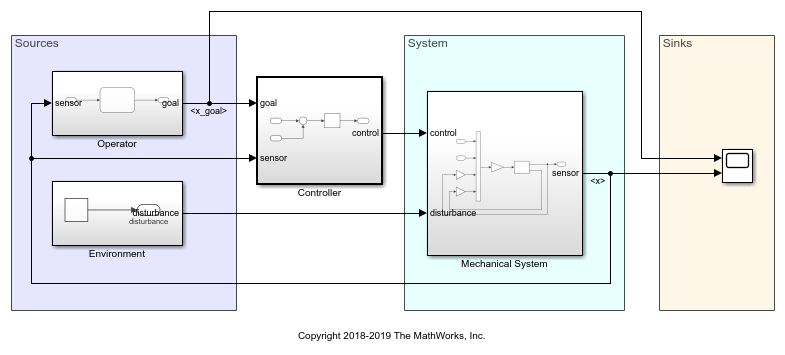
控制器ブロックのライン幅が他よりも太い場合,コントローラーが原子子系统であることを意味します。
各子系统ブロックの端子は,サブシステム内の入力ブロックと出力ブロックに対応します。ブロックラベルに対応する端子の名前が表示されます。たとえば,干扰というラベルの付いた尺寸ブロックは,机械系统ブロックの干扰端子に対応します。

4つのモデルコンポーネントによって質量の位置が決まります。
コントローラーは,機械システムを目標位置に移動させるのに必要な力を計算します。

オペレーターは,質量の目標位置を決定し,関連する手続き論理をStateflow®チャートを使用して実装します。

環境は,機械システムに影響する外乱力を生成します。

シミュレーション中,オペレーターは,2秒間待機してから質量を2メートル上に移動させるようにコントローラーに伝えます。質量が目標位置をオーバーシュートすると,オペレーターは,元の位置の1メートル上に質量を配置するようにコントローラーに伝えます。5秒後,環境外乱によって物理システムに定常力が適用されます。また,コントローラーが反応して目標位置で質量を安定化させます。

関連するトピック
你也可以从以下列表中选择一个网站:
