このペ,ジの翻訳は最新ではありません。ここをクリックして,英語の最新版を参照してください。
シミュレトされたI/Oデタを使用したパワエレクトロニクスモデルのコントロラの設計
この例では,Simscape™电气™コンポ,ネントを使用して,金宝appSimulink®でモデル化されたパワーエレクトロニクスシステム用にPIDコントローラーを設計する方法を説明します。
多くのパワーエレクトロニクスシステムは,パルス幅変調(PWM)発生器などの高周波数のスイッチングコンポーネントを使用するため,線形化することができません。しかし,大半の金宝appSimulink控制设计™のpid調整ルは,線形化されたプラントモデルに基づいてpidゲンを設計します。線形化できないパワーエレクトロニクスモデルに対し,そのようなモデルを取得するには,以下を行うことができます。
この例に示すように,系统辨识工具箱™ソフトウェアを使用してプラントの線形モデルのパラメーターを推定する。
特定の周波数範囲にわたるプラントの周波数応答を推定する。例にいては,周波数応答デ,タを使用したパワ,エレクトロニクスモデルのコントロ,ラ,の設計を参照してください。
昇圧コンバ,タ,モデル
ここではパワ,エレクトロニクスシステムの例として昇圧コンバ,タ,モデルを使用します。昇圧コンバーター回路は,電圧源のチョッピングまたはスイッチング制御によって,ある直流電圧を別の(通常はより高い)直流電圧に変換します。
mdl =“scdboostconverter”;open_system (mdl)

このモデルではパルス幅変調(pwm)信号で駆動するmosfetをスaaplッチ動作に使用します。出力電圧Voutは参照値Vrefに調整する必要があります。デジタルPIDコントローラーが,電圧誤差信号に基づきPWMデューティ比责任を調整します。この例では,PWMデュ,ティ比から負荷電圧Voutへの線形モデルを推定します。
Simscape电ソフトウェアには,多くのパワーエレクトロニクスシステム用の事前定義されたブロックが含まれています。このモデルには,昇圧コンバーターモデルの2つのバージョンをもつバリアントサブシステムが含まれます。
電力コンポ,ネントを使用して作成された昇圧コンバ,タ,の回路。回路コンポ,ネントのパラメ,タ,は[1]に基づきます。
昇圧コンバタ回路と同じパラメタをもように設定された昇圧コンバタブロック。このブロックの詳細にいては,提高转换器(Simscape电气)を参照してください。
モデルの操作点の検出
昇圧コンバーターのコントローラーを設計するには,まず,コンバーターが動作する定常状態の操作点を特定しなければなりません。操作点の検出の詳細にいては,Simscapeモデルの定常状態の操作点の検出を参照してください。この例では,シミュレーションのスナップショットから推定された操作点を使用します。
操作点を検出するには,モデル線形化器を使用します。モデル線形化器を開くには,金宝appSimulinkモデルウィンドウの[アプリ]ギャラリ,で[モデル線形化器]をクリックします。
モデル線形化器の[線形解析]タブで,[操作点]ドロップダウンリストから[シミュレ,ションのスナップショットを撮る]を選択します。

[線形化するスナップショット時間を入力]ダ电子邮箱アログボックスで,[シミュレ,ションのスナップショット時間]フィ,ルドに0.045を入力します。これは閉ル,プシステムが定常状態に達するのに十分な時間です。
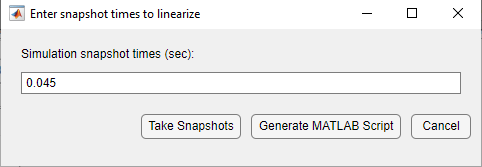
[スナップショットを撮る]をクリックします。
ソフトウェアはモデルをシミュレートして,指定されたスナップショット時間でのモデルの入力値と状態値を含む操作点を作成します。この操作点op_snapshot1が[線形解析ワ,クスペ,ス]に追加されます。

計算した操作点でモデルを初期化するには,op_snapshot1をダブルクリックします。

[編集]ダ电子邮件アログボックスで[モデルの初期化]をクリックします。
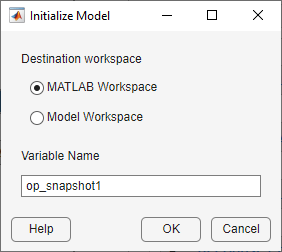
[モデルの初期化]ダ电子邮件アログボックスで[matlabワ,クスペ,ス]を選択して(好的)をクリックします。ソフトウェアはmatlab®ワ,クスペ,スに操作点をエクスポ,トし,その操作点の入力と状態でモデルを初期化します。
コントロ,ラ,の構造の指定
Pid調整器を使用してPID控制器ブロックを調整する前に,コントローラーの構造を指定しなければなりません。そのためには,コントロ,ラ,ブロックをダブルクリックします。その後,次のコントロ,ラ,パラメ,タ,を指定します。
コントロラ
形式
時間領域
離散時間設定
コントロ,ラ,の初期条件,出力の飽和レベル,アンチワ,ンドアップ構成などの,その他の設定
この例では,現在のコントローラー構成,つまり,アンチワインドアップを使用しない離散時間の並列形式PIDコントローラーを使用します。
Pid調整器を使用して,次のコントロ,ラ,ブロックのパラメ,タ,を調整できます。
モデルがSimscape电の离散PI控制器(Simscape电气)ブロックまたは离散PI控制器与积分防清盘(Simscape电气)ブロックを使用する場合,調整の前にこのブロックを离散PID控制器ブロックに置き換えなければなりません。
プラントモデルの同定
Pid調整器を開くには,[調整]をクリックします。最初に開くときに,Pid調整器はモデルを線形化しようとします。PWMコンポ,ネントがあるため,モデルは解析的にゼロに線形化します。
線形プラントモデルを取得するには,[pid調整器]タブで(植物)をクリックしてから,[新規プラントの作成]の下の[新規プラントの同定]をクリックします。
プラントモデルを同定するには,まずモデルをシミュレ,トして入出力デ,タを取得します。[プラントの同定]タブで,[i / oデタの取得]、[デ,タのシミュレ,ション]をクリックします。プラントの同定では,金宝appSimulinkモデルの終了時間に有限値を指定しなければなりません。
[i / oデタのシミュレション]タブで,入力信号を次のように設定します。
[信号タ电子邮箱プ]を
[ステップ]に設定。[サンプル時間]を
5 e-06に設定。[オンセットラグ]を
0.025に設定。これはプラントが定常状態に達するのに十分な時間です。[終了時間]を
0.07に設定。これはプラント出力がステップ入力の後で定常状態に戻るのに十分な時間です。[オフセット]を
0.736に設定。これは計算された操作点でのPID控制器ブロック出力の値です。このモデルでは,オフセットが计算延迟ブロックの状態の値に対応します。モデル内にそのような対応する状態がない場合,PID控制器ブロックの出力にスコープを加えて,計算された操作点でモデルをシミュレートできます。

ステップ振幅を指定するには,![]() をクリックします。次に,[ステップの入力仕様] ダイアログ ボックスの[振幅]フィ,ルドに
をクリックします。次に,[ステップの入力仕様] ダイアログ ボックスの[振幅]フィ,ルドに0.01と入力します。これは,システムを十分に励起する程度に大きく,コントローラーが不連続の電流モードになるのを防ぐ程度に小さい値です。
[シミュレ,ションを実行]をクリックします。Pid調整器は,プラントの入出力応答を取得するために,指定された入力信号をPID控制器ブロックの出力に挿入し,対応する出力応答をコントロ,ラ,の入力で測定します。ソフトウェアは,入力信号のないオフセット応答と,入力信号のある入力応答の2つのシミュレーションを実行します。これらの応答の差が出力応答です。
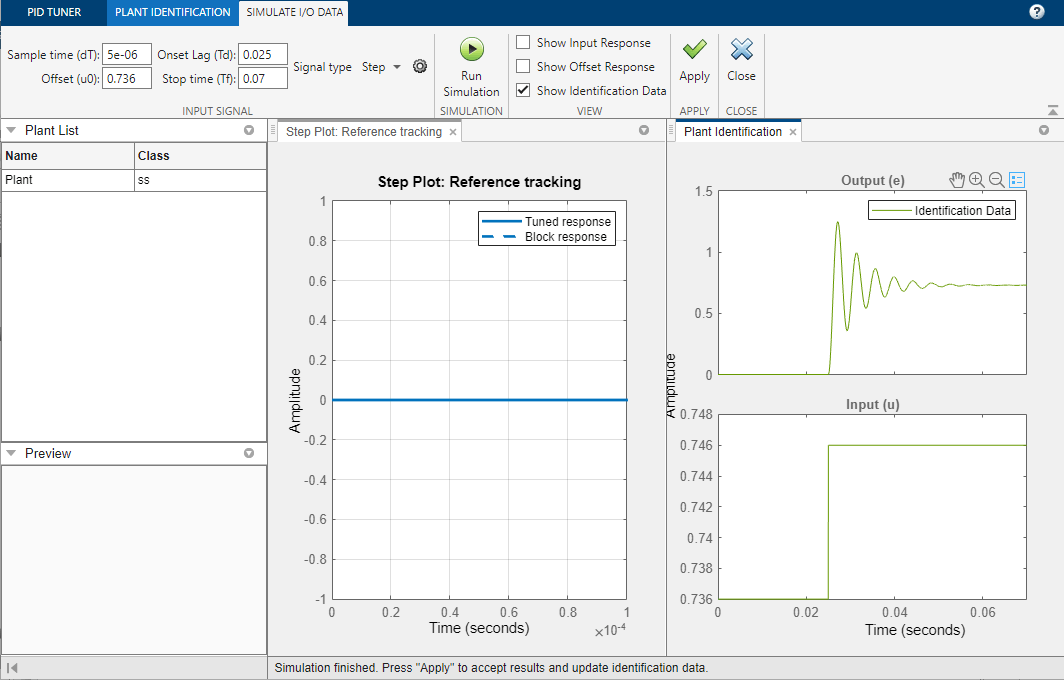
[プラントの同定]ドキュメントで,[入力]プロットに指定された入力信号が表示され,[出力]プロットに対応する出力応答が表示されます。
このシミュレ,トされた入出力デ,タを使用するには,[適用]をクリックします。次に,[閉じる]をクリックして[i / oデタのシミュレション]タブを閉じます。
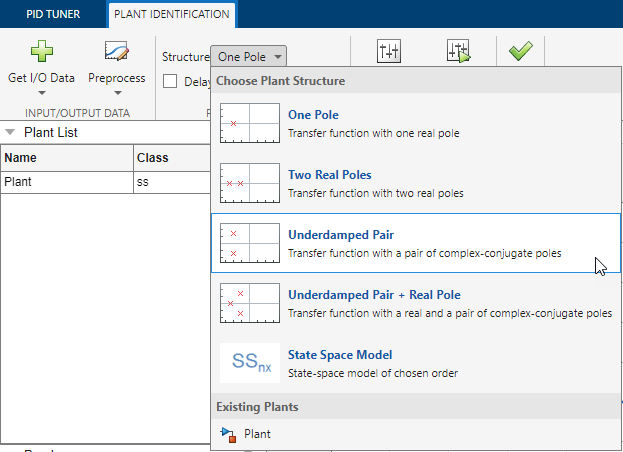
[プラントの同定]タブで,プラントに関する情報と出力ステップ応答の外観に基づいて,同定するプラントの構造を選択します。この例では,出力応答が不足減衰の2次応答のようになります。[構造]ドロップダウンリストで[不足減衰ペア]を選択します。
同定されたプラントのおおまかな近似を得るため,[同定されたプラント構造]プロットで,ステップ応答の包絡線に対応する破線をドラッグします。応答を調整して,出力応答を近似するようにします。

近似の応答を微調整するには,[自動推定]をクリックします。ソフトウェアが,現在のパラメーターを初期推定として使用して,同定されたプラントモデルのパラメーターを推定します。
(植物鉴别进展)ダイアログボックスに,推定プロセスの結果が表示されます。この例では推定デタへの適合が98%を超えています。この同定されたプラントを使用するには,[プラントの同定]タブで[適用]をクリックします。
Pid調整器がその同定されたプラントモデルを更新し,[調整ル]セクションでの調整要件を満たすようにコントローラーパラメーターを選択して,このコントローラーの調整後の応答をプロットします。プロットを拡張するには,[プラントの同定]ドキュメントを閉じます。

ステップ応答にはブロックの応答(破線)と調整された応答(実線)が表示されます。ブロックの応答は,PID控制器ブロックでの現在のpidゲescンに対応します。調整された応答は,Pid調整器での調整済みpidゲescンに対応します。
コントロ,ラ,の調整
帯域幅と位相余裕に基づいてコントロ,ラ,を調整するには,[pid調整器]タブの[領域]ドロップダウンリストで,[周波数]を選択します。
この例では,[帯域幅]と[位相余裕]を,[1]で指定される設計基準に基づいてそれぞれ9425rad/s (1.5 kHz)と60度に設定します。
Pid調整器はこれらの設計仕様を満たすコントロ,ラ,パラメ,タ,を選択します。
調整されたシステムの周波数応答を表示するには,[プロットの追加]をクリックし,[ボ,ド線図]の下の[開ル,プ]をクリックします。

ボ,ド線図の範囲を調整するには,プロット領域を右クリックして[プロパティ]を選択します。その後,[プロパティエディタ]ダアログボックスの[範囲]タブで軸の範囲を設定します。

ゲイン余裕と位相余裕を含めて,調整されたコントローラーパラメーターと性能のメトリクスを表示するには,[パラメ,タ,の表示]をクリックします。調整された結果は,約9425 rad / sで366分贝のゲイン余裕と69度の位相余裕をもちます。

調整されたゲ@ @ンでPID控制器ブロックを更新するには,[pid調整器]タブで,[ブロックの更新]をクリックします。
コントロ,ラ,の検証
回線および負荷の外乱を含むシミュレーションを使用して,調整されたコントローラーの性能を調べることができます。コントロ,ラ,の動的な性能を調べるため,金宝appSimulinkモデルは次の外乱を使用します。
t = 0.075秒で回線の外乱により入力電圧Vinが5vから10vに上昇。
t = 0.1秒で負荷外乱により負荷抵抗Rloadが3オ,ムから6オ,ムに上昇。
モデルのシミュレ,ションを実行します。

コントロ,ラ,は,回線と負荷の外乱を適切に抑制します。
参照
[1]李宗伟电压型升压变换器的实用反馈回路分析申请报告编号SLVA057。德州仪器。2014年1月。www.ti.com/lit/an/slva633/slva633.pdf
参考
関連するトピック
您也可以从以下列表中选择一个网站: