昇圧コンバ,タ,モデルのLPV近似
この例では,昇圧コンバーターのSimscape™电气™モデルについて,線形パラメーター変動(LPV)近似を取得する方法を説明します。LPV表現により,さまざまな操作条件で迅速に平均的動作を解析することができます。
昇圧コンバ,タ,モデル
昇圧コンバーター回路は,電圧源のチョッピングまたはスイッチング制御によって,ある直流電圧を別の直流電圧に変換します。特定の負荷電圧の要求は,トランジスタデュ,ティ比の対応する要件に変換されます。デュ,ティ比の変調は,通常,ス,ッチング周波数より数桁も低速になります。そのため,次の図に示すように,比較的小さなリップルで平均電圧になります。
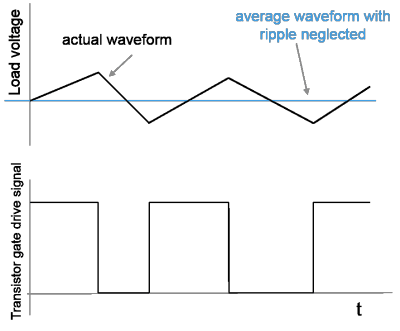
実際には,電源電圧 および抵抗負荷
および抵抗負荷 にも外乱は存在し,実際の負荷電圧
にも外乱は存在し,実際の負荷電圧 に影響します。
に影響します。
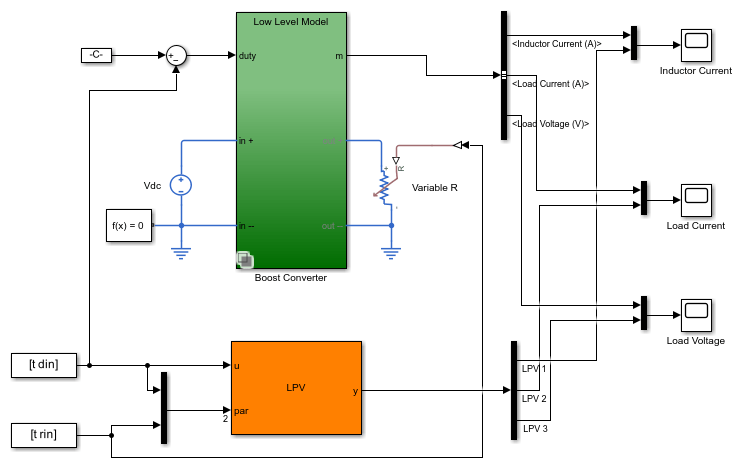
金宝appSimulink®モデルを開きます。
mdl =“BoostConverterExampleModel”;open_system (mdl)

このモデルの回路の特徴は,高周波数のス。このモデルは,25 nsのサンプル時間を使用します。モデルで使用される提高转换器ブロックは,コンバーターダイナミクスの2種類のバージョンを実装するバリアントサブシステムです。このモデルは,単一の入力としてデューティ比を取り,3つの出力(インダクターの電流,負荷電流,および負荷電圧)を生成します。
高周波数のス@ @ッチング要素と短いサンプル時間のため,低速でシミュレ@ @ションが実行されます。
バッチ平衡化と線形化
さまざまな用途において,特定のデューティ比プロファイルに応答して生成される平均電圧が重要となります。そのような動作は,この回路の基本サンプル時間よりも数桁ほど大きいタイムスケールで研究されています。このような回路の“平均モデル”は,一定期間の電力のダ。BoostConverterExampleModelモデルは,最初のバリアントAVG电压模型のような,回路の平均モデルを実装します。一般的にはこのバリアントは,低水準モデルバリアントより高速に実行されます。
平均モデルは線形システムではありません。これは,デュ,ティ比および負荷変動に対する非線形の依存性を示します。シミュレーションの高速化と電圧の安定したコントローラーの設計を実現するために,さまざまなデューティ比および負荷値でモデルを線形化できます。
この例では,スナップショットベ,スの平衡化と線形化を使用します。スケジュ,リングパラメ,タ,は,デュ,ティ比dと抵抗負荷Rです。いく。
この例では,デューティ比の変動に10% ~ 60%の範囲,負荷変動に4 ~ 15Ωの範囲を選択します。それらの値の取りうるすべての組み合わせで取得されたそれぞれのスケジューリング変数および線形化のそれぞれについて,その範囲内の5つの値を選択します。
nD = 5;nR = 5;dspace = linspace(0.1,0.6,nD);d的值在10%-60%范围内Rspace = linspace(4,15,nR);% Rin 4-15欧姆范围内的值[dgrid,Rgrid] = ndgrid(dspace,Rspace);所有d和R值的组合
スケジュリングパラメタのパラメタ構造体配列を作成します。
参数(1)。Name =' d ';参数(1)。Value = dgrid;参数(2)。Name =“R”;参数(2)。Value = Rgrid;
モデルの入力,出力,および状態の数を指定します。
Ny = 3;Nu = 1;Nx = 2;ArraySize = size(dgrid);
さまざまな条件下でのモデルのシミュレーションにより,モデルの出力は0.01秒より前に定常値で安定することがわかります。そのため,スナップショット時間としてt = 0.01sを使用します。
関数findopを使用してスナップショット時間の平衡操作点を計算します。この操作は終了するまでに数分かかります。
Op = findop(mdl,0.01,params);
モデルを線形化するには,最初にモデルから線形化の入力ポaaplントと出力ポaaplントを取得します。
IO = getlinio(mdl);
線形化のオフセットを格納するように線形化オプションを構成します。
opt =线性化选项(“StoreOffsets”,真正的);
配列人事处の操作点でモデルを線形化します。
[linsys,~,info] =线性化(mdl,op,io,params,opt);
線形化の結果からオフセットを抽出します。
offset = getOffsetsForLPV(info);Yoff = offset .y;Xoff = offset .x;Uoff =偏移量。u;
線形システム配列をプロットします。
bodemag (linsys)网格在

LPVシミュレ,ション
linsysは25の線形状態空間モデルの配列で,それぞれに1つの入力,3つの出力,および2つの状態が含まれます。このモデルは,サンプル時間が25 nsの離散時間です。このボード線図は,スケジューリングパラメーターのグリッド上でダイナミクスに大きな変動があることを示します。
線形システム配列と付属するオフセットデタ(uoff、yoff,および发送葡开)を使用して,LPV系统ブロックを構成できます。結果のLPVモデルは,平均ダaaplナミクスの線形システム配列の近似として機能します。BoostConverterLPVModelモデルでは,このようなLPV近似が使用されています。
lpvmdl =“BoostConverterLPVModel”;open_system (lpvmdl)

モデルのシミュレーションを実行する際に,スケジューリングの範囲におおよそ対応するデューティ比の入力プロファイルを使用します。また,抵抗負荷を変動させて,負荷外乱のシミュレ,ションを実行します。
デュティ比のプロファル喧嚣を生成します。
T = linspace(0,.05,1e3)';Din = 0.25*sin(2*pi*t*100)+0.25;Din (500:end) = Din (500:end)+.1;
抵抗負荷のプロファ@ @ルrinを生成します。
Rin = linspace(4,12,length(t))';Rin (500:end) = Rin (500:end)+3;Rin (100:200) = 6.6;
スケジュリングパラメタのプロファルをプロットします。
yyaxis左情节(t, din)包含(“时间(s)”) ylabel (的工作周期) yyaxis正确的情节(t, rin) ylabel (电阻负载(欧姆))标题(“模拟调度参数配置文件”)

上記の信号を生成するためのコ,ドは,個別に読み込みおよび実行するためにモデルのPreLoadFcnコ,ルバックに追加されています。これらの設定をオーバーライドして独自に試す場合は,MATLAB®ワークスペースでこのデータを上書きします。
LPVモデルのシミュレ,ションを実行し,結果の出力を表示します。
sim (lpvmdl“StopTime”,“0.004”);open_system (“BoostConverterLPVModel /输出”)

LPVモデルは,元のBoostConverterExampleModelモデルよりはるかに高速にシミュレ,ションを実行します。
これらのシミュレ,ション結果を元の昇圧コンバ,タ,モデルのシミュレ,ションと比較するには,BoostConverterResponseComparisonモデルを使用します。このモデルでは,忠実度の高い低水準モデルバリアントを使用するように構成された提高转换器ブロックが使用されています。また,LPV系统ブロックも含まれています。モデルのスコ,プで両方のシステムの応答を表示できます。
linsys = c2d(linsys,Ts*1e4);mdl =“BoostConverterResponseComparison”;open_system (mdl)
モデルのシミュレ,ションを実行します。忠実度の高いモデルにおける高速のスイッチングダイナミクスのため,シミュレーションは極めてゆっくりと実行されます。次のコ,ドのコメントを解除してモデルのシミュレ,ションを実行します。
% sim (mdl);
次の図は,。



LPVモデルは,忠実度の高いモデルに比べ,メモリの消費量が少なく,シミュレーションもはるかに高速ですが,昇圧コンバーターの平均的動作をエミュレートできます。
参考
関連するトピック
您也可以从以下列表中选择一个网站: