このページの翻訳は最新ではありません。ここをクリックして,英語の最新版を参照してください。GydF4y2Ba
振子の周期的揺れの動きのシミュレーションGydF4y2Ba
この例では符号数学工具箱™を使用して単純な振子の動きをモデル化する方法を示します。振子の運動方程式を導出し,その方程式を小角について解析的に解き,任意の角度について数値的に解きます。GydF4y2Ba
手顺1:驾驶方程式の导出GydF4y2Ba
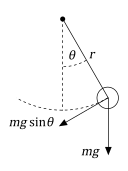
振子は,微分方程式に従う単純な機械的システムです。振子は,初期状態では垂直位置で停止しています。振子がある角度GydF4y2Ba だけ动かされ放れると,重力によりその位置引っ张られます。その运张られます。GydF4y2Ba に達し(摩擦力がない場合),これを繰り返します。重力による振子の動きに伴う復元力はGydF4y2Ba です。したがって,ニュートンの第2法則に従って,質量と加速度の積はGydF4y2Ba に等しくなければなりません。GydF4y2Ba
信谊GydF4y2BaM.GydF4y2Ba一种GydF4y2BaGGydF4y2Baθ(t)GydF4y2Baeqn = m * a == -m * g * sin(theta)GydF4y2Ba
eqn (t) =GydF4y2Ba
长さがGydF4y2Ba のの子では,振子の重りの加入度角加速度にGydF4y2Ba を乗じたものです。GydF4y2Ba
。GydF4y2Ba
subsGydF4y2BaをGydF4y2Ba
の代わりに使用します。GydF4y2Ba
信谊GydF4y2BaR.GydF4y2BaEQN =潜艇(EQN,A,R * Diff(Theta,2))GydF4y2Ba
eqn (t) =GydF4y2Ba
隔离GydF4y2Baを使用してGydF4y2BaEQN.GydF4y2Ba内の角加速度を分离します。GydF4y2Ba
EQN =孤立(EQN,Diff(Theta,2))GydF4y2Ba
EQN =GydF4y2Ba
定GydF4y2Ba およびGydF4y2Ba を“没有动力学数量”GydF4y2Baとしても知られる単一のパラメーターにまとめます。GydF4y2Ba
。GydF4y2Ba
信谊GydF4y2Baomega_0GydF4y2BaEQN =子(EQN,G / R,OMEGA_0 ^ 2)GydF4y2Ba
EQN =GydF4y2Ba
手顺2:动动方程式式形线形GydF4y2Ba
この運動方程式は非線形であるため解析的な求解が困難です。角度が小さいと仮定して,GydF4y2Ba のの开をををししし式を形形ますます。GydF4y2Ba
信谊GydF4y2BaXGydF4y2Ba大约=泰勒(SIN(x),x,GydF4y2Ba'命令'GydF4y2Ba,2);大约=子(约,x,theta(t))GydF4y2Ba
约=GydF4y2Ba
动力方程式式式形形式になります。GydF4y2Ba
EQNLINEAR =潜艇(EQN,SIN(THETA(T)),约)GydF4y2Ba
eqnLinear =GydF4y2Ba
手順3:運動方程式の解析的な求解GydF4y2Ba
方程式GydF4y2Baeqnlinear.GydF4y2BaをGydF4y2BadsolveGydF4y2Baをを使てますます。GydF4y2Ba假设GydF4y2Baを使用してGydF4y2Ba
が実数であると仮定して,解を単纯化します。GydF4y2Ba
信谊GydF4y2BaTheta_0.GydF4y2Batheta_t0.GydF4y2Batheta_t = diff(θ);Cond = [theta(0) == theta_0, theta_t(0) == theta_t0];假设(omega_0GydF4y2Ba“真实”的GydF4y2Ba)Thetasol(t)= dsolve(eqnlinear,cond)GydF4y2Ba
thetaSol (t) =GydF4y2Ba
手順 4:GydF4y2Ba の物理的意味GydF4y2Ba
项GydF4y2Ba は”,位相”GydF4y2Baと呼ばれます。余弦関数と正弦関数は,GydF4y2Ba ごとに缲り返します。GydF4y2Ba をGydF4y2Ba だけ変化させるのに必要な时间は时间周期と呼ばれます。GydF4y2Ba
。GydF4y2Ba
時間周期GydF4y2Ba はは子の长の平方英に比例し,空间には依存ませ。GydF4y2Ba
手顺5:振子运动のプロットGydF4y2Ba
小角近似における振子の运动词をします。GydF4y2Ba
物理パラメーターを定義します。GydF4y2Ba
重力加速度GydF4y2Ba
振子の長さGydF4y2Ba
gValue = 9.81;右值= 1;omega_0Value =√gValue /右值);T = 2 *π/ omega_0Value;GydF4y2Ba
寿命条件を设定ます。GydF4y2Ba
theta_0value = 0.1 * pi;GydF4y2Ba%解只对小角度有效。GydF4y2Batheta_t0value = 0;GydF4y2Ba最初是静止的。GydF4y2Ba
物理パラメーターおよび初期条件を一般解に代入します。GydF4y2Ba
vars = [omega_0 theta_0 theta_t0];值= [omega_0value theta_0value theta_t0value];ThetasoLplot = summ(thetasol,var,值);GydF4y2Ba
调和振子运动をプロットします。GydF4y2Ba
fplot(Thetasolplot(t * t)/ pi,[0 5]);网格GydF4y2Ba在GydF4y2Ba;标题(GydF4y2Ba'谐波摆动运动'GydF4y2Ba);Xlabel(GydF4y2Ba't / t'GydF4y2Ba);ylabel(GydF4y2Ba'\ theta / \ pi'GydF4y2Ba);GydF4y2Ba

の解を求めた後,振子の運動を可視化します。GydF4y2Ba
X_POS = SIN(THETASOLPLOT);y_pos = -cos(thetasolplot);Fanimator(@ fplot,X_POS,Y_POS,GydF4y2Ba'ko'GydF4y2Ba那GydF4y2Ba'markerfacecolor'GydF4y2Ba那GydF4y2Ba“k”GydF4y2Ba那GydF4y2Ba'AnimationRange'GydF4y2Ba,[0 5 * T]);抓住GydF4y2Ba在GydF4y2Ba;Fanimator(@(t)绘图([0 x_pos(t)],[0y_pos(t)],GydF4y2Ba'k-'GydF4y2Ba),GydF4y2Ba'AnimationRange'GydF4y2Ba,[0 5 * T]);Fanimator(@(t)文字(-0.3,0.3,GydF4y2Ba计时器:“GydF4y2Ba+ num2str(t,2)+GydF4y2Ba“s”GydF4y2Ba),GydF4y2Ba'AnimationRange'GydF4y2Ba,[0 5 * T]);GydF4y2Ba

コマンドGydF4y2BaPlayAnimation.GydF4y2Baを入力して振子運動のアニメーションを再生します。GydF4y2Ba

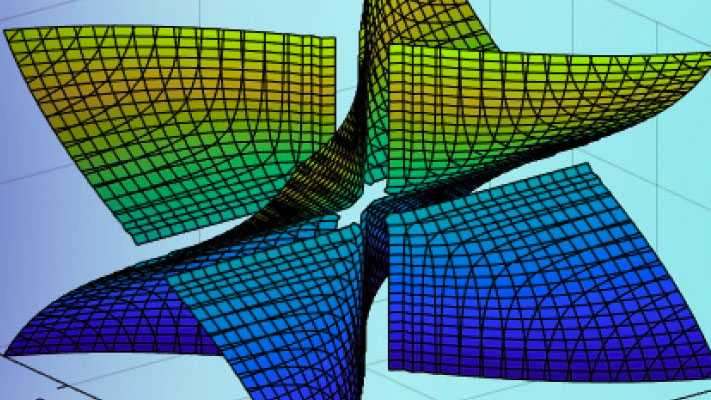
手顺6:定エネルギー轨道を使使用しし非形振子运动の判别GydF4y2Ba
振子ののは,全全のてれをして保存さます。GydF4y2Ba
三角恒等式GydF4y2Ba および关键词GydF4y2Ba をを用して,スケーリングスケーリングされたエネルギーエネルギーをき换えき换えGydF4y2Ba
エネルギーは保存される,振子のののは位相空の定轨道によって记述ますます。GydF4y2Ba
およびGydF4y2Ba
をもつ抽象空间です。これらの轨道をGydF4y2BafcontourGydF4y2Baを使用して可視化します。GydF4y2Ba
信谊GydF4y2Baθ.GydF4y2Batheta_t.GydF4y2Baomega_0GydF4y2BaE(θ,theta_t omega_0) = (1/2) * (theta_t ^ 2 + (2 * omega_0 * sin(θ/ 2))^ 2);Eplot(theta, theta_t) = sub (E,omega_0,omega_0Value);图;= fcontour(Eplot(pi*theta, 2*omega_0Value*theta_t), 2*[-1 1 -1],GydF4y2Ba...GydF4y2Ba“线宽”GydF4y2Ba2,GydF4y2Ba'左边是'GydF4y2Ba,0:5:50,GydF4y2Ba'网格长度'GydF4y2Ba1 + 2 ^ 8);网格GydF4y2Ba在GydF4y2Ba;标题(GydF4y2Ba“阶段空间中的恒定能量轮廓(\ theta vs. \ theta_t)”GydF4y2Ba);Xlabel(GydF4y2Ba'\ theta / \ pi'GydF4y2Ba);ylabel(GydF4y2Ba“\ theta_t / 2 \ omega_0”GydF4y2Ba);GydF4y2Ba

一定エネルギーの高线はGydF4y2Ba 轴およびGydF4y2Ba 轴に対して対称であり,GydF4y2Ba 轴に沿って周期的です0.2つの动作领域を図に示します。GydF4y2Ba
等高线図ののエネルギーは自身になり振振振はますの最大大角最子ののので揺れ。ことはできません。GydF4y2Ba

等高線図の上側のエネルギーは自身に近づきません。振子は常に1つの角度方向で運動します。振子の運動エネルギーは重力エネルギーに打ち勝つのに十分であり,振子を完全に回転させることができます。GydF4y2Ba

手顺7:非线形动机方程式式のGydF4y2Ba
非線形運動方程式は,2階微分方程式です。GydF4y2BaODE45.GydF4y2Baソルバーを使用して,これらの方程式を数値的に解きます。GydF4y2BaODE45.GydF4y2Baは1次の系だけを受け入れるため,系を1次の系に簡約します。次に,GydF4y2BaODE45.GydF4y2Baへのの力と关联数目を生成します。GydF4y2Ba
2阶odeを1阶ode系系书架。GydF4y2Ba
信谊GydF4y2Baθ(t)GydF4y2Batheta_t(t)GydF4y2Baomega_0GydF4y2Baeqs = [diff(theta)== theta_t;diff(theta_t)== -omega_0 ^ 2 * sin(θ)]GydF4y2Ba
eqs(t)=GydF4y2Ba
方程式=潜艇(方程式,omega_0 omega_0Value);var = [theta, theta_t];GydF4y2Ba
系の送量行程GydF4y2BaM.GydF4y2Baおよび方程式GydF4y2BaFGydF4y2Baの右辺を含むベクトルをますます。GydF4y2Ba
[M F] = massMatrixForm(方程式一样,var)GydF4y2Ba
m =GydF4y2Ba
F =GydF4y2Ba
M.GydF4y2BaおよびGydF4y2BaFGydF4y2Baは次の形で表されます。GydF4y2Ba
后后の计算を単纯単纯するために,系系を次の形にき换えき换えき换えGydF4y2Ba 。GydF4y2Ba
f = m \ fGydF4y2Ba
f =GydF4y2Ba
铁饼GydF4y2Baを使用して,GydF4y2BaFGydF4y2BaをMATLAB関数ハンドルに変換します。結果の関数ハンドルはMATLAB颂歌ソルバーGydF4y2BaODE45.GydF4y2Baの入力になります。GydF4y2Ba
f = odeFunction(f, var)GydF4y2Ba
f =GydF4y2Bafunction_handle具有值:GydF4y2Ba@(t,IN2)[IN2(2,:); SIN(IN2(1,:))。*( - 9.81e + 2. / 1.0e + 2)]GydF4y2Ba
手順8:閉じたエネルギー等高線における運動方程式の求解GydF4y2Ba
ODE45.GydF4y2Baをを使し,闭じたエネルギー等高线のodeを解きます。GydF4y2Ba
エネルギー等高线図,闭じた等高线は条件GydF4y2Ba
那GydF4y2Ba
を満たします。GydF4y2Ba
およびGydF4y2Ba
の初期条件を変数GydF4y2Bax0GydF4y2Baに保存します。GydF4y2Ba
x0 = [0;1.99 * omega_0Value];GydF4y2Ba
解解求めるため,0秒から10秒までの空间间隔を指定します。GydF4y2Ba
tInit = 0;tFinal = 10;GydF4y2Ba
odeを解きます。GydF4y2Ba
sols = ode45(f,[tinit tfinal],x0)GydF4y2Ba
溶胶=GydF4y2Ba结构与字段:GydF4y2Ba解决方案:'ode45' extdata: [1x1 struct] x: [1x45 double] y: [2x45 double] stats: [1x1 struct] data: [1x1 struct]GydF4y2Ba
: sols.y (1)GydF4y2Baは角変位GydF4y2Ba
を表し,GydF4y2Basols.y(2,:)GydF4y2Baは角速度GydF4y2Ba
を表します。GydF4y2Ba
闭じた轨道の解をプロットします。GydF4y2Ba
图;yyaxis.GydF4y2Ba剩下GydF4y2Ba;plot(sols.x,sols.y(1,:),GydF4y2Ba'-O'GydF4y2Ba);ylabel(GydF4y2Ba“\θ(rad)”GydF4y2Ba);yyaxis.GydF4y2Ba对GydF4y2Ba;绘图(Sols.x,Sols.y(2,:),GydF4y2Ba'-O'GydF4y2Ba);ylabel(GydF4y2Ba'\ theta_t(rad / s)'GydF4y2Ba);网格GydF4y2Ba在GydF4y2Ba;标题(GydF4y2Ba“阶段空间中的封闭路径”GydF4y2Ba);Xlabel(GydF4y2Ba't(s)'GydF4y2Ba);GydF4y2Ba

振子のの运可化ます。GydF4y2Ba
x_pos = @(t)sin(deval(sols,t,1));y_pos = @(t)-cos(deval(sols,t,1));图;Fanimator(@(t)绘图(x_pos(t),y_pos(t),GydF4y2Ba'ko'GydF4y2Ba那GydF4y2Ba'markerfacecolor'GydF4y2Ba那GydF4y2Ba“k”GydF4y2Ba));抓住GydF4y2Ba在GydF4y2Ba;Fanimator(@(t)绘图([0 x_pos(t)],[0y_pos(t)],GydF4y2Ba'k-'GydF4y2Ba));Fanimator(@(t)文字(-0.3,1.5,GydF4y2Ba计时器:“GydF4y2Ba+ num2str(t,2)+GydF4y2Ba“s”GydF4y2Ba));GydF4y2Ba

コマンドGydF4y2BaPlayAnimation.GydF4y2Baを入力して振子運動のアニメーションを再生します。GydF4y2Ba

手順9:開いたエネルギー等高線の解GydF4y2Ba
ODE45.GydF4y2Baを使使し,开いたエネルギー等高线のodeを解きます。エネルギー等高线図,开いた等高线は条件GydF4y2Ba
那GydF4y2Ba
を満たします。GydF4y2Ba
x0 = [0;2.01 * omega_0Value];sols = ode45(f, [tInit, tFinal], x0);GydF4y2Ba
开いたエネルギーエネルギー高线の解をプロットします。GydF4y2Ba
图;yyaxis.GydF4y2Ba剩下GydF4y2Ba;plot(sols.x,sols.y(1,:),GydF4y2Ba'-O'GydF4y2Ba);ylabel(GydF4y2Ba“\θ(rad)”GydF4y2Ba);yyaxis.GydF4y2Ba对GydF4y2Ba;绘图(Sols.x,Sols.y(2,:),GydF4y2Ba'-O'GydF4y2Ba);ylabel(GydF4y2Ba'\ theta_t(rad / s)'GydF4y2Ba);网格GydF4y2Ba在GydF4y2Ba;标题(GydF4y2Ba“相空间的开放路径”GydF4y2Ba);Xlabel(GydF4y2Ba't(s)'GydF4y2Ba);GydF4y2Ba

振子のの运可化ます。GydF4y2Ba
x_pos = @(t)sin(deval(sols,t,1));y_pos = @(t)-cos(deval(sols,t,1));图;Fanimator(@(t)绘图(x_pos(t),y_pos(t),GydF4y2Ba'ko'GydF4y2Ba那GydF4y2Ba'markerfacecolor'GydF4y2Ba那GydF4y2Ba“k”GydF4y2Ba));抓住GydF4y2Ba在GydF4y2Ba;Fanimator(@(t)绘图([0 x_pos(t)],[0y_pos(t)],GydF4y2Ba'k-'GydF4y2Ba));Fanimator(@(t)文字(-0.3,1.5,GydF4y2Ba计时器:“GydF4y2Ba+ num2str(t,2)+GydF4y2Ba“s”GydF4y2Ba));GydF4y2Ba

コマンドGydF4y2BaPlayAnimation.GydF4y2Baを入力して振子運動のアニメーションを再生します。GydF4y2Ba

选择网站GydF4y2Ba
选择一个网站,在那里获得翻译的内容,并看到当地的活动和优惠。根据您的位置,我们建议您选择:GydF4y2Ba。GydF4y2Ba
选择GydF4y2Ba网站GydF4y2Ba您还可以从以下列表中选择一个网站:GydF4y2Ba
美洲GydF4y2Ba
- 美国拉丁GydF4y2Ba(español)GydF4y2Ba
- 加拿大GydF4y2Ba(英语)GydF4y2Ba
- 美国GydF4y2Ba(英语)GydF4y2Ba
欧洲GydF4y2Ba
- 比利时GydF4y2Ba(英语)GydF4y2Ba
- 丹麦GydF4y2Ba(英语)GydF4y2Ba
- 德意志GydF4y2Ba(德意志)GydF4y2Ba
- España.GydF4y2Ba(español)GydF4y2Ba
- 芬兰GydF4y2Ba(英语)GydF4y2Ba
- 法国GydF4y2Ba(Français)GydF4y2Ba
- 爱尔兰GydF4y2Ba(英语)GydF4y2Ba
- 意大利GydF4y2Ba(意大利语)GydF4y2Ba
- 卢森堡GydF4y2Ba(英语)GydF4y2Ba
- 荷兰GydF4y2Ba(英语)GydF4y2Ba
- 挪威GydF4y2Ba(英语)GydF4y2Ba
- Österreich.GydF4y2Ba(德意志)GydF4y2Ba
- 葡萄牙GydF4y2Ba(英语)GydF4y2Ba
- 瑞典GydF4y2Ba(英语)GydF4y2Ba
- 瑞士GydF4y2Ba
- 联合王国GydF4y2Ba(英语)GydF4y2Ba
亚太地区GydF4y2Ba
- 澳大利亚GydF4y2Ba(英语)GydF4y2Ba
- 印度GydF4y2Ba(英语)GydF4y2Ba
- 新西兰GydF4y2Ba(英语)GydF4y2Ba
- 中国GydF4y2Ba
- 日本人GydF4y2Ba(日本語)GydF4y2Ba
- 한국GydF4y2Ba(한국어)GydF4y2Ba