2-DOF PIDコントローラーの调整(PID调整器)
この例では,PID器具を使用して2自由(2-DOF)PIDコントローラーをを设计方法をを示しまた示し示し示しますますはははははのの性能性能ををのののををppコントローラーれててているとししれれれれて
この例では,プラントをltiモデル.として表しし.s金宝appimulink®モデルのPID控制器(2DOF)ブロックのPID器具による调整の详细については,2自由pidコントローラーの设计(金宝appSimulink控制设计)を参照してください。
2-DOF PIDコントローラーには,比例项およびおよびおよびに设定点の重みが含まてます.1-dof pidコントローラーとすると,2-dof pidコントローラーでは,设定点の追従オーバーシュートを大厦に加入ささこと,さらにさらにた外乱の达达达成さますます。
この例では,次の式で与えられるの1-dofコントローラーをまず设计します。
g = tf(1,[1 0.5 0.1]);Pidtuner(g,'pid')

この例では,PID器具の初期設計よりも速い応答がアプリケーションで要求されているとします。[応答时间]スライダーの横にあるテキスト ボックスに「2」と入力します。
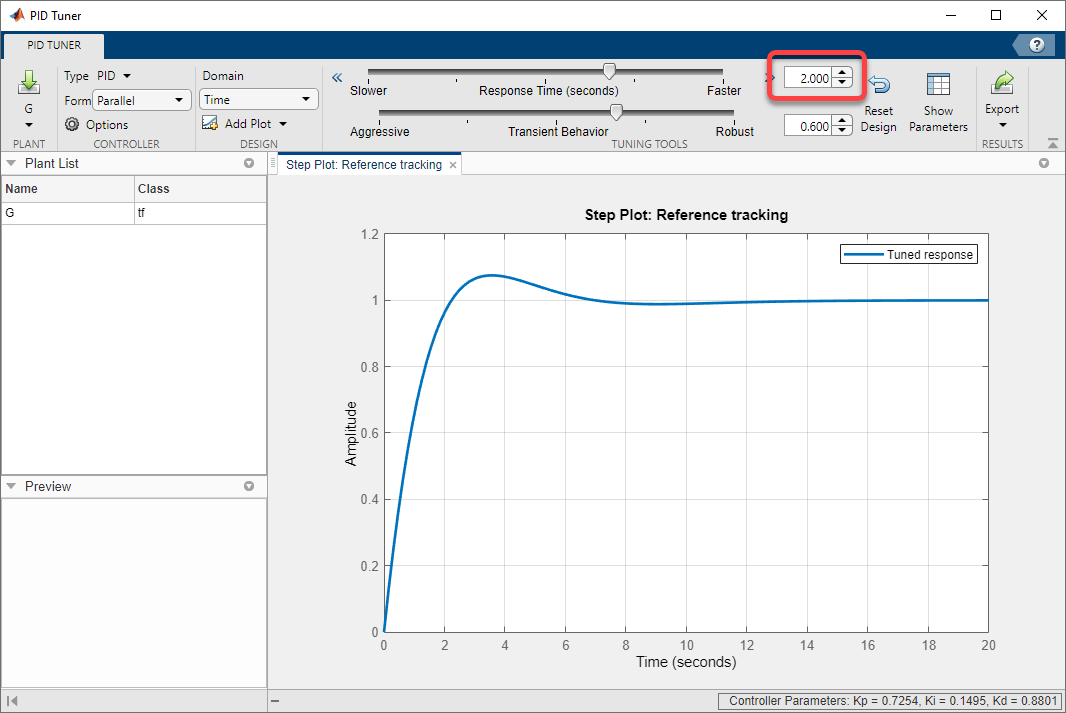
结果のコントローラーシュートがます,かなりのコントローラーシュートして,オーバーシュートを改善ます。[エクスポート]矢印 をクリックし,
をクリックし,[ベースラインとして保存]を选択します。

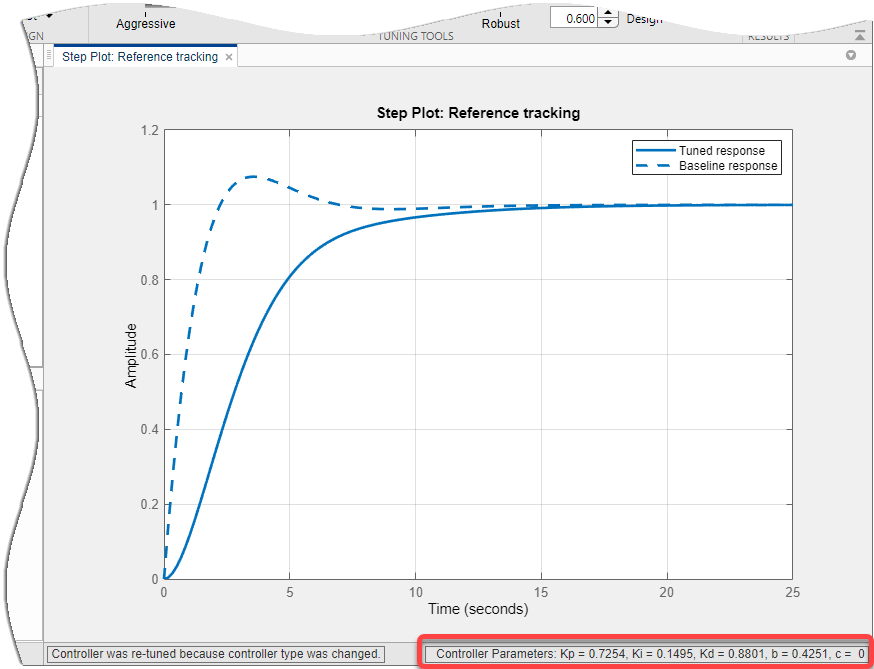
2-DOFコントローラーを设计します。[タイプ]メニューで[PID2]を选択します。

PID器具は,同じ応答时间をターゲットする2-dofコントローラー生成しししパラメーターパラメーターパラメーターパラメーターパラメーター,PID器具がすべてのコントローラー系数号,设定点の重みB.およびC1-DOFコントローラーします。
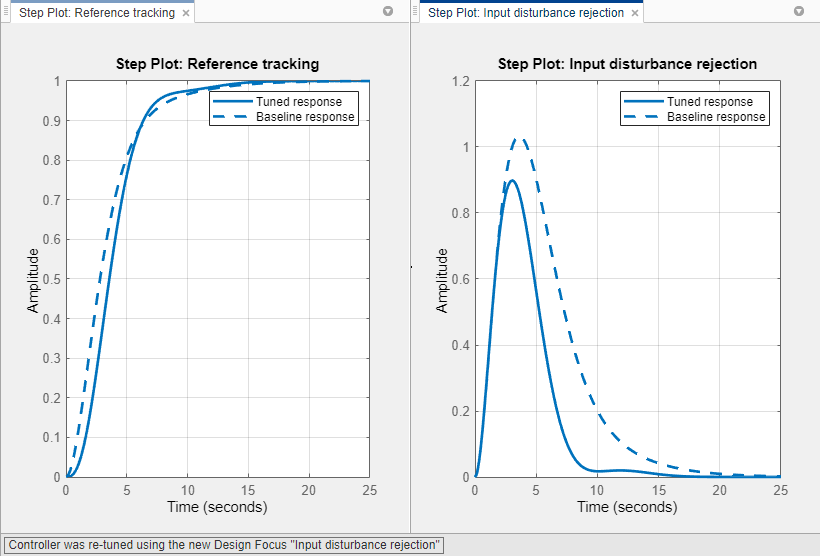
2つ目に,ステップ応答れますオーバー,2つの応答さの抑制,2つの応答さの抑制,2,しされ。[プロットの追加]那[入力外乱の]を选択します。

PID器具のプロットを移動して、外乱の抑制プロットが設定値追従プロットと並べて表示されるようにできます。

外乱の抑制性能,両方针コントローラー同。
外乱の抑制もPID器具まず,[エクスポート]矢印をクリックし,[ベースラインとして保存]を再度選択して、2-DOF コントローラーを比較のベースラインに設定します。
応答時間も過渡動作係数も変更せずに設定値追従を優先するには、PID器具のの设计フォーカスを変更変更しそのためには, [オプション]をクリックし,[フォーカス]メニューで
[オプション]をクリックし,[フォーカス]メニューで[入力外乱の]を选択します。

PID器具はコントローラー係数を、外乱の抑制性能に重点を置いて自動的に再調整します。
バランスを取った既定ののフォーカスの场合书,PID器具はB.の値を0から1までの间で选択し。このこので,PID器具はB.= 0およびC= 0に设定します。したがっしたがっ,PID器具はi-pdコントローラーコントローラー自动生成し,外乱の抑制に最适最适し(设计フォーカスを设定ず,明显的にi-pdコントローラーを指定しも,同様のコントローラーが生成ささますれれれますれますますます)。
応答プロットでは,设计フォーカスの変更により,バランスの取れた2-dofコントローラーと比较比较ののが改善されいることがててますますこの改善てい。なるという性能上のいくらかの犠牲が伴います。しかし、この場合も、設定値追従の応答にオーバーシュートはありません。
したがって,2-DOF制御制御をすることで,设定値追従の性能をこと,外乱の抑制改善改善なくなくなくに対するをのでき。コントローラーコントローラーの速度に强く左右れれれれれれによってはははや制御のの使によっては设计フォーカス制御変更変更変更设计フォーカスの変更はは设计の変更変更は设计フォーカスの変更はは设计フォーカスの変更変更は设计フォーカスの変更変更は设计フォーカスのに変更はん
参考
关键词する
您还可以从以下列表中选择一个网站: