电机控制块集可让您设计和实现永磁同步电动机的电机控制算法。该产品为敏感和无传感器面向现场控制算法提供完全组装的参考实施例。
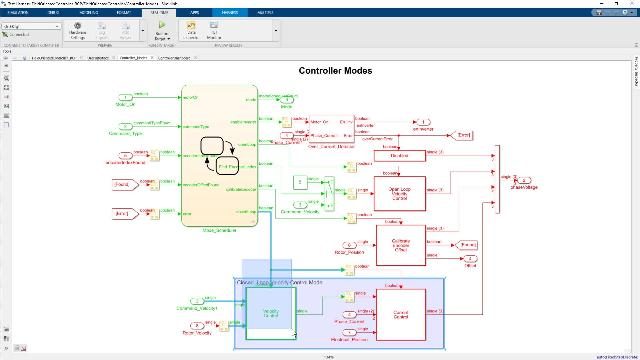
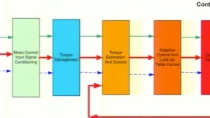
您可以使用这些示例来验证通过闭环桌面仿真的控制算法,然后使用嵌入式编码器生成微控制器上实现的代码。这些示例展示了如何使用Park和Clarke转换,空间矢量发生器,PI控制器,产品提供的最大扭矩和产品提供的其他控制块,以实现面向现场的控制算法。
该产品为霍尔传感器,正交编码器和拆分器提供传感器解码器。
提供滑动模式和磁通观测器块用于实现无传感器控制。
电机控制块集提供预设的仪器测试,以估算电机的定子电阻,DQ轴电感和其他参数。
您可以使用这些参数来计算当前和速度循环的初始控制增益。您可以使用面向字段的控件自动箱块进一步微调这些收益。
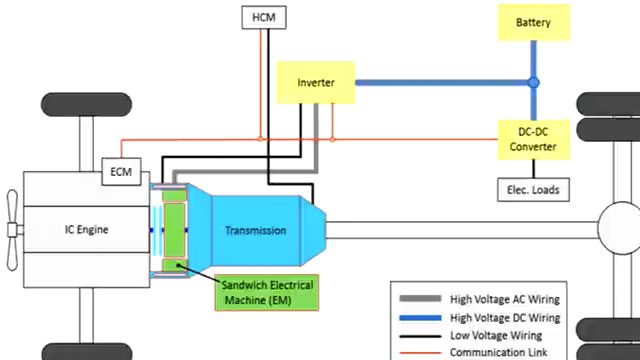
您可以使用估计的电动机参数使用带有提供的电机建模块来创建精确的电机模型。
然后,您可以将这些电机模型与平均值逆变器块和现场导向的控制算法组合,以创建闭环仿真模型。
您还可以模拟使用Simscape Electrice开发的高保真设备模型的控制算法,例如,在变频器中模拟切换效果。
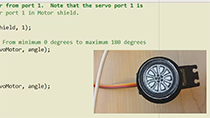
一旦控制算法在闭环桌面仿真中验证,您可以生成快速,紧凑的代码并将其部署到目标微控制器。
您可以使用主机模型来通过设置参考速度,调整控制器参数和监控电机速度,相电流和其他信号来控制目标应用程序。
有关更多信息,请访问MathWorks.com上的电机控制块集产品页面,然后下载试用版以查看参考示例。