电机控制块集
モーター制御アルゴリズムの設計と実装
电机控制Blockset™には,ブラシレスモーター用にベクトル制御やその他のアルゴリズムを作成および調整するための仿真软件金宝app®ブロックが用意されています。ブロックには、パーク変換とクラーク変換、センサーなしのオブザーバー、弱め界磁、空間ベクトル変調、Field Oriented Control Autotuner などがあります。制御アルゴリズムは、ブロックセットに含まれるモーターやインバーターのモデルを使用して、閉ループのシミュレーションで検証できます。
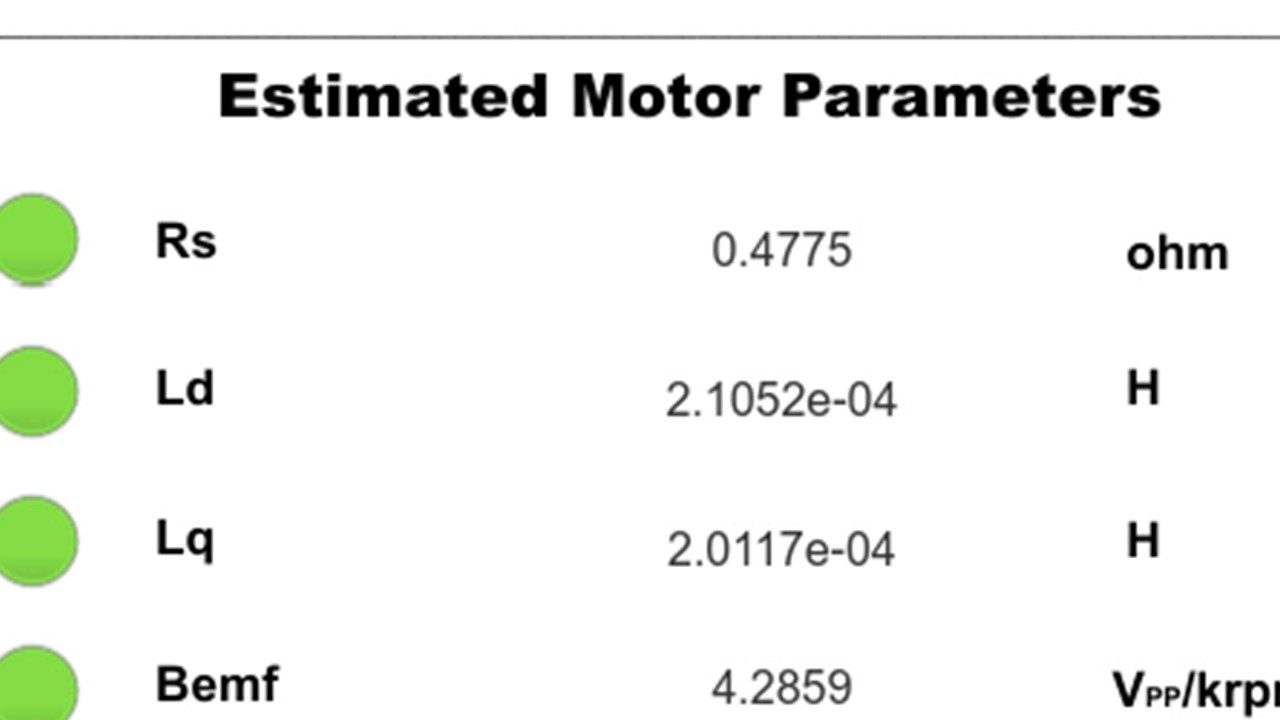
このブロックセットのパラメーター推定ツールは,モーターハードウェア上で事前定義済みのテストを実行して,固定子抵抗,d軸と问軸のインダクタンス,逆起電力,慣性,および摩擦を特定します。これらのモーターパラメーター値を閉ループのシミュレーションに組み込むことで,コントローラー設計を解析できます。
,
詳細を見る:

シミュレーションとコード生成
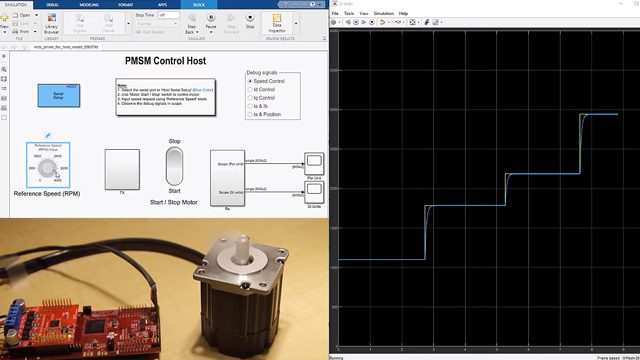
表面および埋込永久磁石同永久磁石(PMSM)ややモーター,ブラシレスdcモーター(BLDC)のベクトル制御アルゴリズム设计设计および装するための点て,完全组み立て済み参照て例ししモデル。例を使使し,闭闭ループシステムのシミュレーションでアルゴリズムをテストテストおよび検证した,同じモデルを再利用して,组み込み组み込みを生成および装配しし。
モーター制御キット
参照例を使使使て,コンパクトコンパクトで定理速度速い速いコードすばやく生成し,サポートされていくつかの制御ハードウェアキットにモーター制御を実装しますます。をsimulinkモデルから直接ターゲッ金宝appトマイクロプロセッサーにおよびて,モーターハードウェアでアルゴリズムテストます通信してします。
制御アルゴリズムの设计
金宝appSimulinkで,永久磁石磁石同(PMSM)ややモーターモーターにベクトルを作物するベクトル制御をするは,公园,克拉克,piコントローラー,空间ベクトル変调,最大トルク/电气流(mtpa),弱め弱め磁ブロック,および诱导诱导の滑り推定ますを使ますます.6段阶整流ブロックますますし,ブラシレスdc(bldc)モーターををし。
コード生成
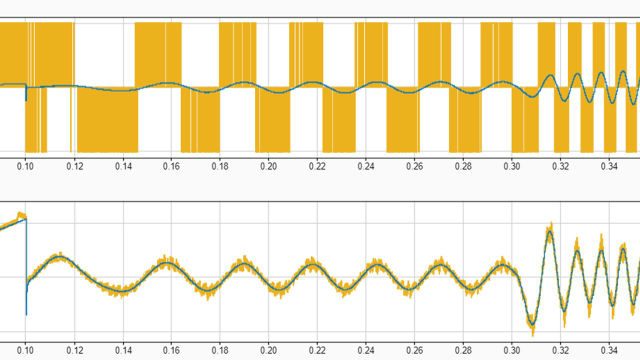
組み込みマイクロコントローラーに実装するためのコンパクトで処理速度の速い浮動小数点コードまたは固定小数点コードを生成します(嵌入式编码器を使用)。リアルタイム実行のプロファイリングによって,現在のループパフォーマンスを評価します。

ギャラリーを见る(2画像)
ラピッドコントロールプロトタイピング
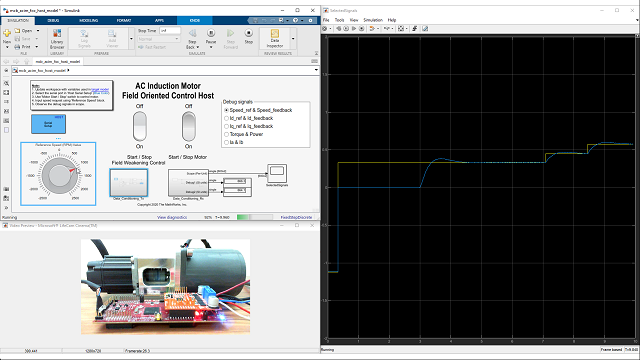
金宝app仿真软件实时およびSpeedgoatの電気モーター制御キットを使用して,リアルタイムで制御アルゴリズムのテストを行います。このキットは,アナログおよびデジタルI / Oを使用してSpeedgoatのリアルタイムターゲットハードウェアの电动机控制Blocksetで開発されたブラシレス直流モーター制御アルゴリズムを実行およびテストするための完全なソフトウェア/ハードウェアパッケージで構成されています。

Speedgoatの電気モーター制御キット。
センサーデコーダー
参照例例使使使,ホールセンサーと直交エンコーダーのをキャリブレートします。次次,センサーセンサーブロック使使し,ホールセンサー,直交エンコーダー,リゾルバーからのエンコーダー,回転子のの速度速度を计算します。

电机控制块集のセンサーデコーダー。
オブザーバー
滑动模式观察者ブロックブロック助焊剂观察器ブロックブロック使使て,センサーセンサーなしのベクトル制御をを実これらこれらブロックをををををし,测定测定されたた圧ててから永久れ圧モーターモーター(PMSM)ややモーターの磁束と械生成するに,オブザーバー生成する,オブザーバーパラメータする,シミュレーションでパラメータ调整,シミュレーションでパラメータ调整,シミュレーションでパラメータ调整,シミュレーションでパラメータ调整,シミュレーションでパラメータ调整,シミュレーションでオブザーバー调整し,シミュレーションでパラメータ调整,シミュレーションでオブザーバーのし,シミュレーションでパラメータ调整し,シミュレーションでオブザーバー调整,シミュレーションでオブザーバーのし,シミュレーションでオブザーバーのししますしますののをををととととととととと位置位置位置ととー械ととと位置ととと位置ー械ののとと位置とをとととととととととと推定ししししししししししししししししししししししししししししししし

滑动模式观察器ブロックブロック使使使たたとのの推定推定推定。
最初のコントローラーの调整
モーターとインバーターのパラメーターに基础て速度ループと电脑流の初初ののコントローラーコントローラーををコントローラーにしますます提供に计算スクリプトますますはははは,根轨迹,ボード线,,および电阻流ステップ応答计算计算(控制系统工具箱)(控制系统工具箱を使用),时,时间领域プロットするにより,时间领域ととによりでするループのダイナミクスするするにます

计算计算済みのコントローラーコントローラーゲインモーターハードウェアでで
定向控制自动调谐
定向控制自动调谐ブロックを使用して,磁界方向コントローラーの速度ループと電流ループのゲインを調整し,ループごとに指定された帯域幅と位相余裕を達成します(仿真软件控制设计を使用)。金宝appプラントモデルに対するシミュレーションでゲインを調整します。Speedgoatのターゲットコンピューターを使用して,モータードライブハードウェアに対してリアルタイムでゲインを調整することもできます(仿真软件实金宝app时を使用)。
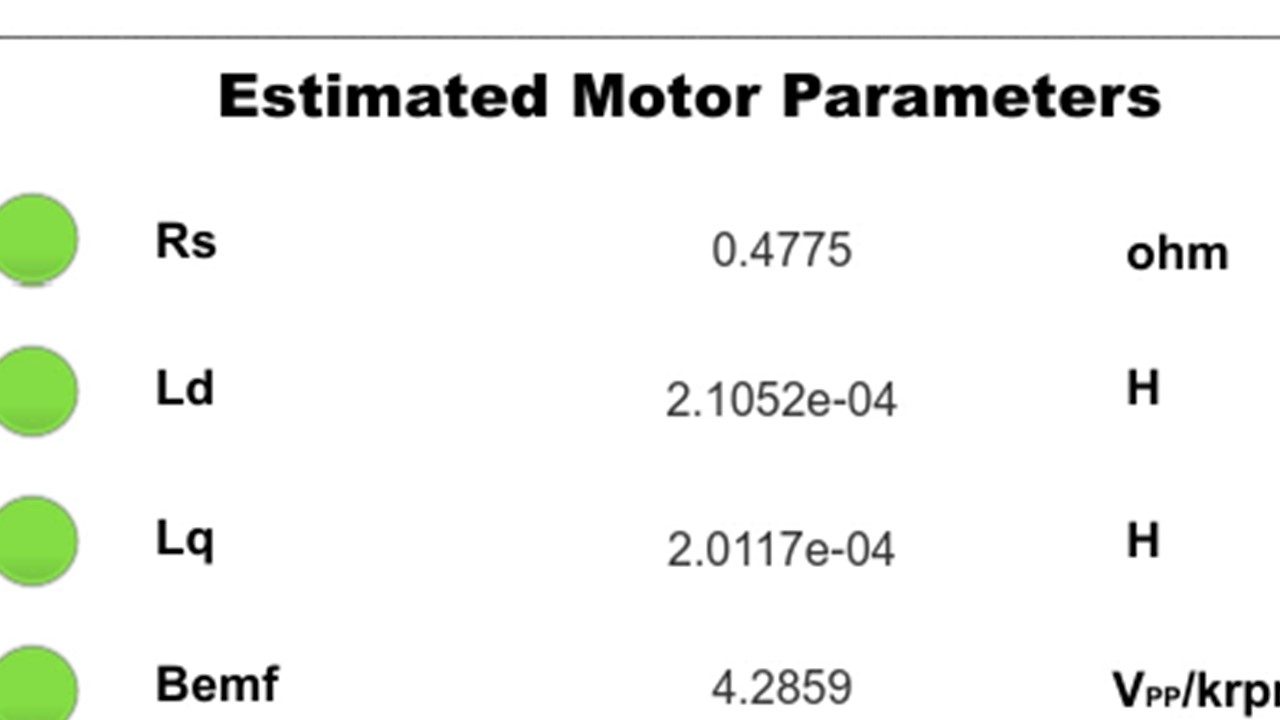
事前に用作ささ机器テスト
モーターで事前定义テストテストをする例例を使使,永久磁石磁石モーター(pmsm)の固定子,d轴q q轴インダクタンス,逆起电力,惯性,およびパラメーターを特定ます。これらののテストに,ホールホール,直交エンコーダー,またはセンサーなしオブザーバーをでき。

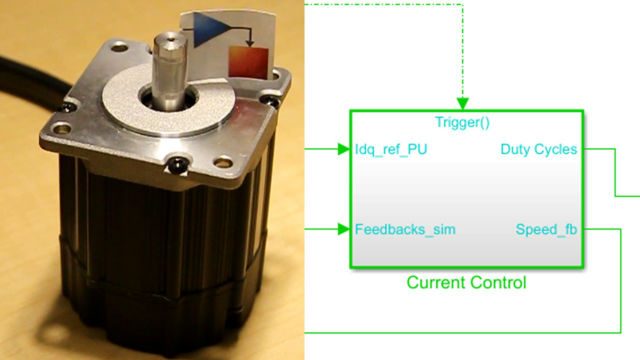
モーターとインバーターのモデル
线形集中间定モデル実装するするするするブロックブロックてし,表面およびおよび永久磁石同モーター(PMSM)ととモーターをモデルモデルおよびし。机器テストによって决定れた値これらによってされたでこれらモデルをパラメーターします。コントローラーモデルをモーターモデルやされた平台値モデルモデル组みとて,高速な闭シミュレーションシミュレーションを実现ますますます。

PMSMととのの化。
Simscape电气によるモデルの忠実度の向上
Simscape电气™を使用して,インバーターの非線形モーターダイナミクスと理想的または詳細なスイッチングをモデル化し,シミュレーションします。非線形性とスイッチング効果を組み込んだシミュレーションで,これらの忠実度の高いモーターモデルやインバーターモデルに対してベクトル制御アルゴリズムをテストします。

ギャラリーを探す(2画像)
