滑模观测器
计算转子的电气位置和机械速度
- 库:
电机控制模块/无传感器估计器
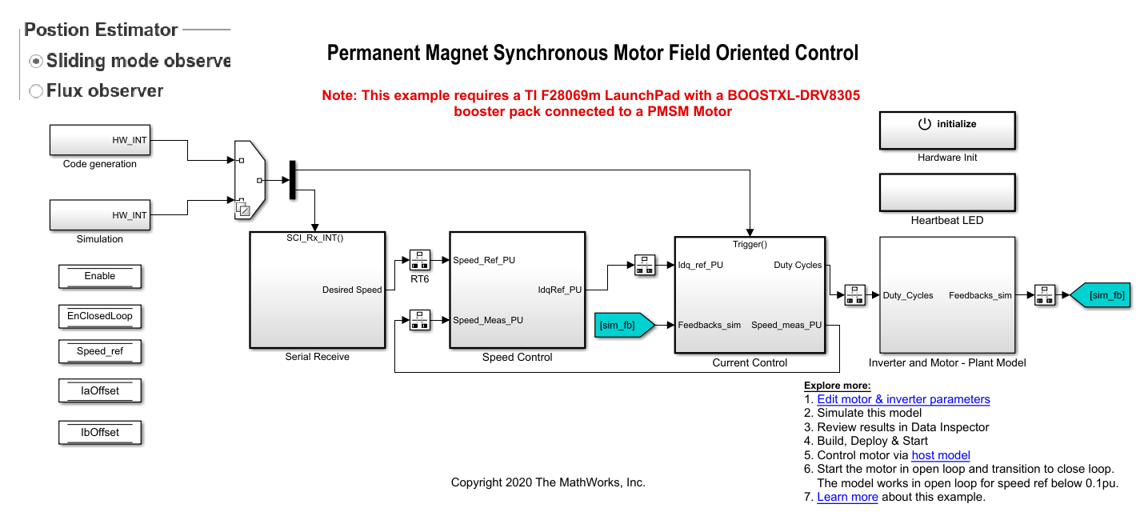
描述
的滑模观测器块通过使用PMSM的单位电压和电流值来计算PMSM的电气位置和机械速度α-和β静止物体的轴αβ参考系。
方程
这些方程描述了块的电气位置和机械速度的计算。
这些方程通过使用单位值描述离散时间滑模观测器的操作:
地点:
为定子反电动势和α轴电流。
是定子反电动势和电流为β轴。
为定子电源电压。
为定子电阻。
为定子电感。
是由永磁体引起的磁链。
为电角速度。
为转子的电气位置。
是时候了。
为采样周期。
为样本计数。
为每单位1对应的标称电压。
为每单位1对应的标称电流。
为吸引函数。

为滤波器的截止频率,以每个样本的周期为单位。
为每秒周期的截止频率。
为采样频率,单位为采样每秒。
是估计的反EMF。

调优
使用当前观察者获得和滑动面限制参数来调优块。
提高稳定性,增加稳定性滑动面限制或减少当前观察者获得.
为了减少失真,减小当前观察者获得或增加滑动面限制.
港口
输入
输出
参数
模型的例子
参考文献
[1]黄志强,“基于自适应速度控制的无传感器永磁同步电动机驱动系统的设计与仿真,”2012第四届智能与先进系统国际会议(ICIAS2012),吉隆坡,2012,第439-444页(doi: 10.1109 / ICIAS.2012.6306234)
[2]张燕和V. Utkin,“电动机器的滑模观察者——概述”,工业电子学会2002第28届年会。IECON 02,塞维利亚,2002,第3卷,第1842-1847页。(doi: 10.1109 / IECON.2002.1185251)
[3]陈建平,“永磁同步电机无传感器矢量控制的离散时间滑模观测器”,机械工程学报,2004IEEE工业电子学汇刊第61卷第1期4,第1679-1691页,2014年4月(doi: 10.1109 / TIE.2013.2267700)
[4]郭振国,“基于无传感器控制的SPMSM滑模观测器的设计”,中国电机工程学报,vol . 18, no . 2, pp . 341 - 3462015 IEEE电气传动无传感器控制(SLED)研讨会,悉尼,新南威尔士州,2015,第1-6页。(doi: 10.1109 / SLED.2015.7339255)
扩展功能
你也可以从以下列表中选择一个网站:
