이번역페이지는최신내용을담고있지않습니다않습니다。최신최신내용을영문영문으로여기를클릭클릭
PID조정기를사용용pid제어기설계하기
控制系统工具箱™의PID조정기를사용하여lti모델.로표현되는플랜트에대해PID제어기를대화형방식으로자동조정할수있습니다。
PID조정기를사용하여si金宝appmulink®모델의PID控制器블록블록을조정하는하는방법에대한자세한내용基于模型的PID调谐介绍在Simulink中金宝app(金宝appSimulink控制设计)항목을참조하십시오。
PID조정기개개
PID조정기를사용하여하여단일단일루프단위제어구성의피드피드경로에서대화형방식방식방식방식방식수p수수수수수수

PID조정기는는자동으로플랜트플랜트에제어기를설계설계사용자는는제어기(p,i,pi,pd,pdf,pid,pidf)과형식(병렬또는표준)을지정합니다。
또한PID조정기를사용하여하여다음그림그림같은피드백구성에서에서에서구성pp제어기를설계수수수수수수수수수

PID조정기는설정점가중치가조정가능한한자유파라미터일수있는있는pp수수수수수PID조정기는i-pd및pi-d와와이일반적인제어구성설정점가중치중치된를설계할할수도수도수도
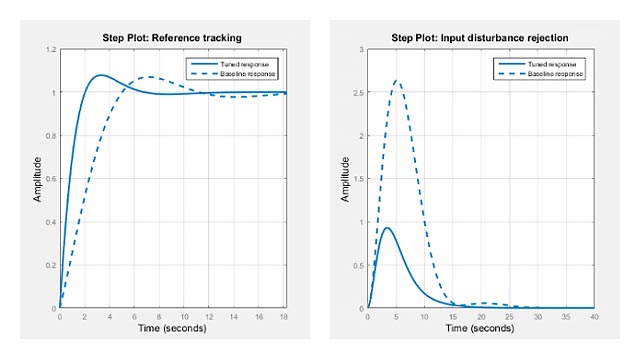
다양한응답플롯을사용하여설계를분석하고,성능요구사항에맞게대화형방식으로설계를조정할수있습니다。
PID조정기를실행하려면PidTuner.명령을사용하십시오。
PidTuner(SYS,类型)
여기서SYS.는제어하려는플랜트의선형모델이고类型은설계할제어기유형을나타냅니다。
또는다음을입력하십시오。
PidTuner(SYS,CBase)
여기서CBASE.는기준제어기로,설계된제어기의성능을CBASE.의성능과비교할수있습니다。
SYS.및CBASE.에대한자세한내용은PidTuner.함수도움말페이지를를참조。
참고
PID조정기는matlab.®데스크탑의앱탭에서열수도있습니다。그럴경우PID조정기의플랜트메뉴를사용하여플랜트모델을지정하십시오。
PID제어기유형
제어기유형을선택하려면다음방법중하나를사용하십시오。
앱을열때유형지정하기-PID조정기를열때
PidTuner.명령에类型인수를제공합니다。예를들어,Pidtuner(g,'pidf2')는미분항에필터가있는2-DOF PID제어기제어기를초기설계로로PID조정기를엽니다。기존제어기객체를사용하여하여유형지정-PID조정기를열때
PidTuner.명령에기준제어기CBASE.인수를제공합니다。PID조정기$가CBASE.와동일한유형의제어기를설계합니다。예를들어,C0.이비례동작동작과미분미분동작만p제어기객체라고가정하겠습니다(PD제어기)。이때PidTuner(G,C0)은pd제어기를초기설계로갖는PID조정기를엽니다。앱내에서제어기유형지정하기-PID조정기에서유형메뉴를사용하여제어기유형을변경합니다。


다음다음에는사용가능한pid제어기유형이요약되어되어。이러한제어기제어기유형에에대한내용내용내용내용PID控制器类型进行调谐항목을참조하십시오。
1-DOF제어기
PidTuner.에대한类型입력 |
유형메뉴의항목 | 제어기동작 |
|---|---|---|
'P' |
P. |
비례만 |
'一世' |
一世 |
적분만 |
'pi' |
PI. |
비례와적분 |
'PD' |
PD. |
비례와미분 |
'pdf' |
PDF. |
비례와미분。미분항에1차필터사용。 |
'PID' |
p |
비례,적분,미분 |
'pidf' |
PIDF. |
비례,적분,미분。미분항에1차필터사용。 |
2-DOF제어기
PID조정기는자유설정점가중치가적용된2自由度PID제어기유형을자동설계할수있습니다。다음표에는PID조정기의2-DOF제어기유형이요약되어되어。일반적인2-DOF PID제어기제어기에대한자세한내용내용两级自由度PID控制器항목을참조하십시오。
PidTuner.에대한类型입력 |
유형메뉴의항목 | 제어기동작 |
|---|---|---|
'pi2' |
PI2. |
2-DOF비례비례와 |
'pd2' |
PD2. |
2-DOF비례비례와 |
'pdf2' |
PDF2 |
2-DOF비례와미분。미분항에1차필터사용。 |
'PID2' |
PID2. |
2-DOF비례,적분,미분 |
'pidf2' |
PIDF2. |
2-DOF비례,적분,미분。미분항에1차필터사용。 |
고정된설정점가중치를갖는2-DOF제어기
PID조정기를사용하여다음표에요약되어있는고정설정점가중치제어기유형을설계합니다。이러한제어기제어기유형에에대한내용내용내용내용PID控制器类型进行调谐항목을참조하십시오。
PidTuner.에대한类型입력 |
유형메뉴의항목 | 제어기동작 |
|---|---|---|
'i-pd' |
I-Pd. |
B = 0,C = 0÷2-DOF PID |
'i-pdf' |
I-PDF. |
B = 0,C = 0÷2-DOF PIDF |
'ID-P' |
ID-P. |
b = 0,c =1¼2-DOF PID |
'IDF-P' |
IDF-P. |
B = 0,C = 1÷2-DOF PIDF |
'pi-d' |
PI-D. |
B = 1,C = 0÷2-DOF PID |
'pi-df' |
pi-df. |
B = 1,C = 0÷2-DOF PIDF |
이산시간시간제어기
SYS.가샘플시간이TS.인이산시간시간모델인인PID조정기는一塑料이산적분기적분기식사용하여이산시간p제어기를설계합니다。다른이산적분기적분기식을갖는제어기를설계하려면다음방법중사용하십시오
실행명령
PidTuner.에이산시간시간기준CBASE.를제공합니다。PID조정기는CBASE.와동일한이산적분기적분기식을을갖는를설계설계PID조정기를실행한후옵션을클릭하여제어기옵션대화상자를엽니다。적분식메뉴와도함수식메뉴에서이산적분기적분기식을선택선택선택
PID제어기형식
PidTuner.에类型입력을사용용PID조정기가병렬병렬형식으로제어기제어기설계설계설계표준형식으로제어기를설계하려면다음방법중하나를사용하십시오。
실행명령
PidTuner.에표준형식기준제어기CBASE.를제공합니다。PID조정기$가CBASE.와동일한형식의제어기를설계합니다。PID조정기를실행한후에형식메뉴를사용하여제어기형식을변경합니다。
병렬병렬및표준제어기제어기형식에대한자세한내용p那PID2.那PIDSTD.및PIDSTD2.함수도움말페이지를를참조。
관련항목
您还可以从以下列表中选择一个网站: