이번역페이지는최신내용을담고있지않습니다않습니다。최신최신내용을영문영문으로여기를클릭클릭
PID조정알고리즘
일반적인pid조정목표는다음과같습니다。
폐루프안정성 - 폐루프시스템의출력이유계입력에대해유계상태로유지됩니다。
충분한성능 - 폐루프시스템이기준변동을추종하고가능한한빠르게외란을억제합니다。루프대역폭(단위개루프이득의주파수)이클수록제어기가루프의기준또는외란에빠르게반응합니다。
충분한강인성 - 루프설계에모델링또는시스템동특성변동을허용충분한충분한이득충분한여유위상가있습니다。
PID제어기를조정하는mathworks®알고리즘으로성능과강인성사이의균형이이루어지도록PID이득을조정하여이러한목표를달성합니다。기본적으로알고리즘은플랜트동특성을기반으로교차주파수(루프대역폭)를선택하고60°의위상여유를목표로설계합니다。PID조정기인터페이스를사용하여하여응답,대역폭,과도응답또는여유를방식으로하면이알고리즘은은pid이득득득득계산계산계산
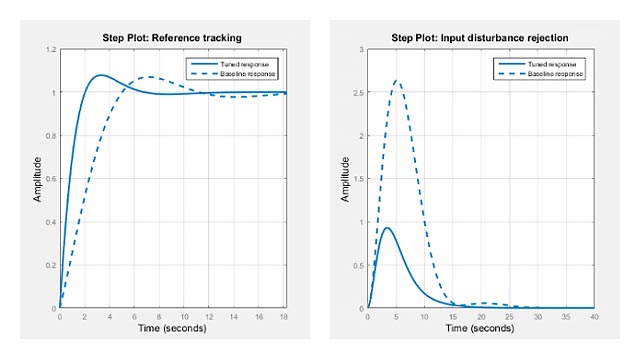
조정알고리즘은주어진강인성(최소위상여유)에맞춰성능의두가지척도인기준추종과외란제거사이의균형이잡힌제어기설계를선택합니다。두가지성능성능척도중하나를우선시하도록설계중점변경할수수할변경할수이렇게하려면하려면명령줄PidTune.의Designfocus.옵션을사용하거나PID조정기에서옵션대화상자를사용하십시오。
시스템에조정가능한파라미터가능파라미터알고리즘이강인성을희생하지원원설계을달성할가능성이높아집니다설계을을달성할이이높아집니다。예를들어,설계중점을설정하는것또는pi제어기보다pid제어기에더적적가능성이큽니다。00일부플랜트의경우설계중점을변경하는것이미미한영향을미치거나아무런영향을미치지않습니다。
您还可以从以下列表中选择一个网站: