音叉的结构动力学
对音叉进行模态和瞬态分析。
音叉是U形梁。当被击中它的一个尖头或尖齿时,它会以其基本(第一)频率振动并发出可听见的声音。
音叉的第一个柔性模式的特点是弹齿的对称振动:它们同时朝着彼此移动和远离彼此,在它们相交的底部平衡力。基本振动模式不会对连接在弹齿交叉处的手柄产生任何弯曲效应。音叉底座无弯曲,操作方便,不影响音叉的动态性能。
弹齿的横向振动导致手柄以基频轴向振动。这种轴向振动可通过使手柄末端接触更大的表面积(如金属桌面)来放大可听声音。具有对称振型的次高阶模约为基频的6.25倍。因此,适当激励的音叉倾向于以与基频相对应的主频振动,产生纯可听的音调。此示例通过执行模态分析和瞬态动力学模拟来模拟音叉动力学的这些方面。
您可以找到助手函数AnimateSixturingForkModes和Tuningforkfft.和几何文件TuningFork.stl在下面MATLAB / R20XXX /示例/ PDE / MAIN。
调谐叉的模态分析
寻找自然频率和模式形状,用于调谐叉和下一个模式的基本模式。在基频处显示对叉手柄缺乏弯曲效应。
首先,为稳定调谐叉的模态分析创建一个结构模型。
model = createpde('结构'那“模态实体”);
为了对结构进行无约束模态分析,它足以指定几何形状,网格和材料属性。首先,导入和绘制调谐叉几何。
importeometry(型号,'tuningfork.stl'); 图pdegplot(模型)
指定杨氏模量、泊松比和质量密度以模拟线弹性材料行为。以一致的单位指定所有物理特性。
E = 210E9;nu = 0.3;rho = 8000;结构性额外(型号,'年轻odsmodulus'E......“PoissonsRatio”,nu,......'massdention',rho);
生成网格。
generateMesh(模型,“Hmax”,0.001);
解决所选择的频率范围的模型。指定低于零的较低频率限制,以便在解决方案中出现零附近频率的所有模式。
RF=求解(模型,“频率范围”,[ - 1,4000] * 2 * pi);
默认情况下,求解器返回圆形频率。
modeID=1:numel(射频自然频率);
将结果频率除以 。在表中显示频率。
tmodalresults = table(modeid。',rf.naturalfruquence / 2 / pi);tmodalresults.properties.variablenames = {'模式'那“频率”};DISP(TModalResults);
模式频率0.0072398 2 0.0033543 3 0.0025636 4 0.0039618 5 0.0053295 6 0.0094544 7 460.42 8 706.34 9 1911.5 10 2105.5 11 2906.5 12 3814.7
因为本例中没有边界约束,所以模态结果包括刚体模态。前六个近零频率表示三维实体的六个刚体模态。第一个柔性模式是频率约为460 Hz的第七个模式。
可视化模式形状的最佳方法是在它们各自的频率下动画谐波运动。这AnimateSixturingForkModes功能为六种灵活模式设置动画,它们是模态结果中的模式7到12RF.。
Frames = AnimateSixTuningForkModes(RF);


要播放动画,请使用以下命令:
电影(图('单位','归一化','OutherPosition',[0 0 1 1]),框架,5,30)
在第一模式中,调谐叉的两个振荡叉在手柄处平衡横向力。具有此效果的下一个模式是第五个灵活模式,频率为2906.5Hz。该频率约为460 Hz的基频约6.25倍。
调谐叉的瞬态分析
模拟调谐叉的动态轻轻,快速撞到其中一个叉子。随着时间的推移和手柄轴向振动分析叉振动的振动。
首先,创建结构瞬态分析模型。
tmodel = createpde('结构'那'瞬态 - 坚实');
导入您用于模态分析的相同调谐叉几何体。
进口几何(tmodel,'tuningfork.stl');
生成网格。
网格=生成网格(tmodel,“Hmax”,0.005);
指定杨氏模量,泊松比和质量密度。
结构性额外(TModel,'年轻odsmodulus'E......“PoissonsRatio”,nu,......'massdention',rho);
通过使用面标签打印几何图形,识别用于应用边界约束和载荷的面。
身材(“单位”那'标准化'那“外置”,[0 0 1 1])pdegplot(tmodel,'FaceLabels'那'在')视图(-50,15)标题'带脸标签的几何图形'

强加足够的边界限制以防止施加载荷下的刚体运动。通常,您用手调整叉或将其安装在桌子上。对该边界条件的简化近似是将区域固定在叉条和手柄(面部21和22)附近的区域。
StructuralBC(TModel,“脸”,[21,22],'约束'那“固定的”);
通过在基本模式的一小部分时间内施加压力载荷,近似齿面上的脉冲载荷。通过使用这个非常短的压力脉冲,你可以确保音叉只有基本模式被激发。评估时间段T.对于基本模态,使用模态分析的结果。
t = 2 * pi / rf.naturalfruquencies(7);
将齿上的压力负载指定为短矩形压力脉冲。
结构边界荷载(T模型,“脸”,11,'压力',5E6,'时间结束',T/300);
将零位移和速度施加为初始条件。
结构性(TModel,“位移”,[0; 0; 0],'速度',[0; 0; 0]);
解决瞬态模型50个基本模式。按基本模式的每个周期示例60次动态。
ncycle = 50;SamplingFrequency = 60 / T;tlist = linspace(0,ncycle * t,ncycle * t * samplingfring);r =解决(tmodel,tlist)
R=具有以下特性的瞬态结构结果:位移:[1×1结构]速度:[1×1结构]加速度:[1×1结构]求解次数:[1×3000双]网格:[1×1 FEMesh]
绘制齿尖振动的时间序列,即齿面12。查找齿尖面上的节点并绘制齿面y- 使用这些节点之一随着时间的推移来组织置换。
ExcitedTinetipnodes = findnodes(网格,“区域”那“脸”,12);tipdisp = r.displacement.uy(ExcitedTinetipnodes(1),:);图绘图(R.Solutions,TipDisp)标题('Tine Tip的横向位移')XLIM([0.0.1])XLabel('时间')伊拉贝尔(“Y位移”)

对尖端位移时间序列执行快速傅立叶变换(FFT),以查看音叉的振动频率是否接近其基频。由于瞬态分析中施加的约束,出现了与无约束模态分析中计算的基频的小偏差。
[FTIP,PTIP] = TUNINGFORKFFT(TIPDISP,SAMPLINGFREQUENCY);图绘图(FTIP,PTIP)标题({“单边振幅谱”那'尖端振动'})xlabel('F(Hz)')伊拉贝尔('| P1(F)|')XLIM([0,4000])

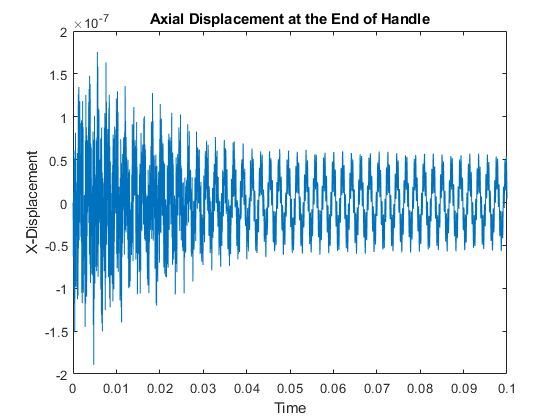
齿的横向振动使手柄以相同的频率轴向振动。为了观察这种振动,绘制手柄的端面的轴向位移时间序列。
basenodes = tmodel.mesh.findnodes(“区域”那“脸”,6); baseDisp=R.Displacement.ux(baseNodes(1),:);图表(R.SolutionTimes,baseDisp)标题('手柄末端的轴向位移')XLIM([0,0.1])Ylabel('x-betplacement')xlabel('时间')
对手柄轴向振动的时间序列执行FFT。该振动频率也接近其基频。
[fbase,pbase] = tuningforkfft(合成,采样频率);图绘图(fbase,pbase)标题({“单边振幅谱”那“基础振动的影响”})xlabel('F(Hz)')伊拉贝尔('| P1(F)|')XLIM([0,4000])

您还可以从以下列表中选择网站: