利用自动PID整定和图形博德设计设计补偿器
此示例演示如何为Simulink设计补偿器金宝app®模型中使用自动PID调优控制系统设计应用程序。然后说明如何使用开环Bode编辑器微调补偿器设计。
系统模型
此示例使用水箱组件设计金宝app仿真软件模型。打开模型,在MATLAB®在命令行中,输入:
open_system (“watertank_comp_design”)

此模型包含一个水箱系统单回路反馈系统的被控对象模型和PID控制器。
要查看水箱模型,请打开水箱系统子系统。

该模型表示如下水箱系统。

在这里:
H是水箱中的水的高度。
卷是水箱中的水量。
v为施加在泵上的电压。
A.为槽的横截面积。
B是一个常数,与流入水箱的流量有关。
A.是一个常数,与流出水槽的流量有关。
水以与施加到泵上的电压成比例的速率从顶部进入水箱。水通过水箱底座上的开口流出,流出速度与水箱中水位的平方根成正比。水流量平方根的存在导致非线性对象。根据这些流速,储罐容积的变化率为:
设计要求
调整PID控制器,以满足以下闭环阶跃响应设计要求:
超调量小于5%
上升时间小于5秒
开放式控制系统设计器
开控制系统设计,在Simulin金宝appk模型窗口中应用程序图库,单击控制系统设计。
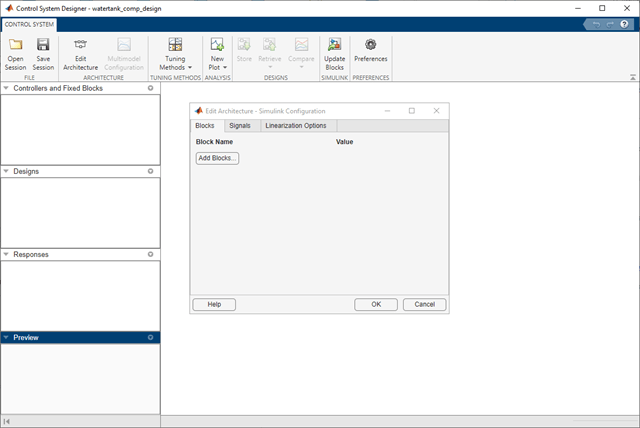
控制系统设计打开并自动打开“编辑体系结构”对话框。
指定要调优的块
要指定要调优的补偿器,请在Edit Architecture对话框中单击添加块。
在“选择要调优的块”对话框中,在左侧窗格中,单击控制器子系统。在曲调列,在方框中打勾PID控制器。
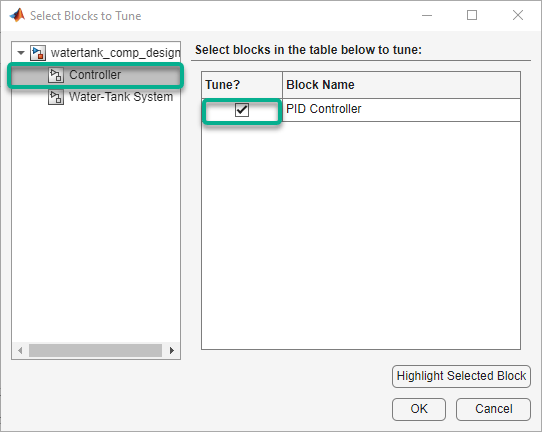
点击好吧。
在Edit Architecture对话框中,应用程序将选择的控制器块添加到要调优的块列表中块标签。上信号选项卡,该应用程序还添加输出PID控制器块到分析点的列表位置。

当控制系统设计打开时,它会将以前在Simulink模型中定义的所有分析点添加到金宝app位置列表。为水箱组件设计在美国,有两个这样的信号。
想要的水位块输出-闭环阶跃响应的参考信号
水箱系统块输出-闭环阶跃响应的输出信号
要线性化Simulink模型并设置金宝app控制架构,请单击好吧。
默认情况下,控制系统设计在模型初始条件下对模型进行线性化。
应用程序将PID控制器添加到数据浏览器,在控制器和固定块部分。该应用程序还计算开环传递函数在输出PID控制器块,并将此响应添加到数据浏览器。

绘制闭环步进响应
分析控制器的设计,建立系统的闭环传递函数并绘制其阶跃响应曲线。
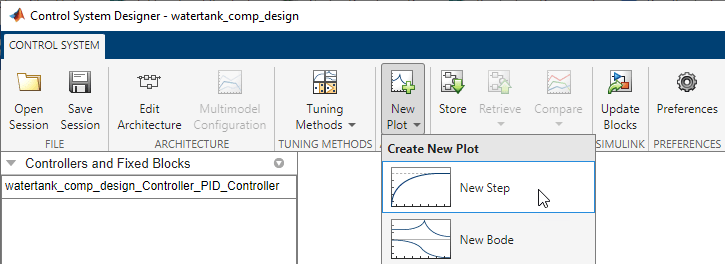
上控制系统选项卡,单击新的剧情,然后选择新的一步。
在“新建绘图步骤”对话框中选择对图则的回应下拉列表中,选择新的输入-输出传输响应。
要添加一个输入信号,在指定输入信号区域,点击+. 在下拉列表中,选择想要的水位块

要添加输出信号,请在指定输出信号区域,点击+. 在下拉列表中,选择水箱系统块

要创建闭环传递函数并绘制阶跃响应,请单击情节。

要查看响应图上的最大超调,右键单击图区域并选择特征>峰值响应。
要查看响应图上的上升时间,右键单击绘图区域,并选择特征>上升时间。

将鼠标移到特征指标上,查看它们的值。目前的设计有:
最大超调量47.9%。
上升时间为2.13秒。
这个响应不满足5%超调量的设计要求。
使用自动PID整定的整定补偿器
要使用自动PID调节来调节补偿器,请单击调优方法,然后选择PID调节。
在“PID调整”对话框中,在规格节中,选择以下选项:
调优方法—
健壮的响应时间控制器类型—π
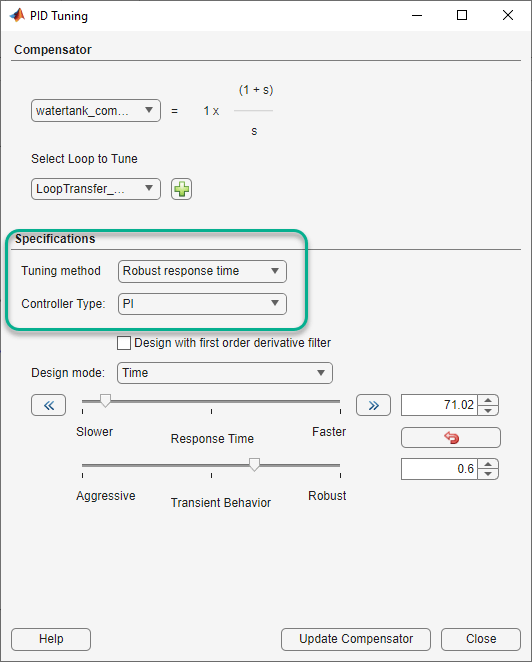
点击更新补偿器。该应用程序更新新的补偿器设置的闭环响应和更新阶跃响应图。

若要检查系统性能,请将鼠标放在响应特征标记上。带调谐补偿器的系统响应为:
最大超调量为13.8%。
上升时间51.2秒。
该响应超过了5%的最大允许超调量。上升时间比要求的5秒上升时间慢得多。
使用Bode图形调整调整补偿器
为了减少上升时间,交互式地增加补偿增益使用图形波德调谐。
要打开“开环Bode编辑器”,请单击调优方法,然后选择波德编辑器。
在“选择要编辑的响应”对话框中,控件输出的开环响应PID控制器块已选定。要打开此响应的Bode编辑器,请单击情节。
查看波德编辑器和阶跃响应并排的地块,就在看法选项卡,单击左/右。
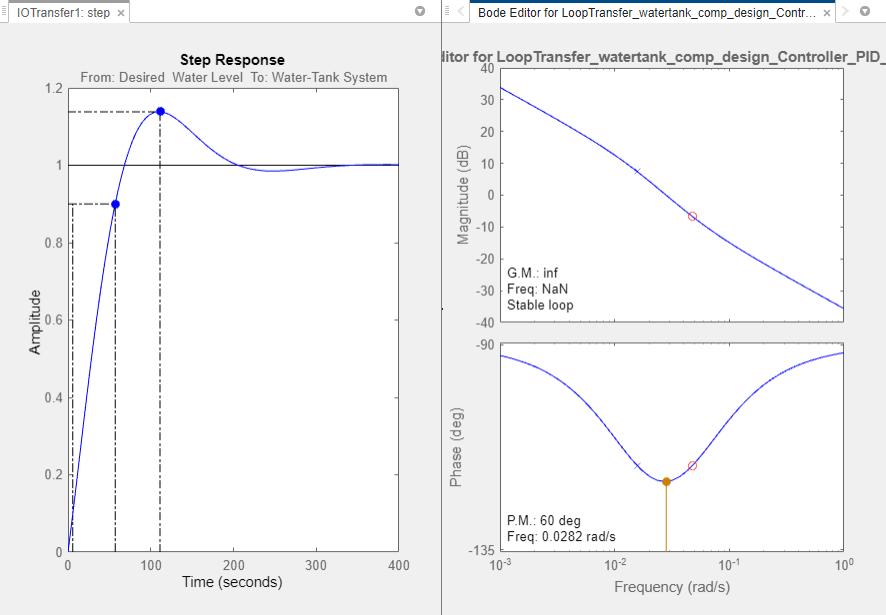
在波德编辑器绘制,向上拖动幅值响应以增加补偿器增益。通过增加增益,可以增加带宽并加快响应速度。

向上拖动Bode响应时,应用程序会自动更新补偿器和相关响应图。此外,当您在右侧的状态栏中释放绘图时,应用程序将显示更新的增益值。
增加补偿器增益,直到阶跃响应满足设计要求。一个可能的解决方案是将增益设置为1.7。

在该增益值下,闭环响应具有:
最大超调量4.74%。
上升时间为4.36秒。
使用补偿器编辑器微调控制器
要直接调整补偿器的参数,请使用补偿器编辑器。在波德编辑器,在绘图区域上单击鼠标右键,然后选择编辑补偿器。
在“补偿器编辑器”对话框中的参数选项卡,调整PID控制器增益。有关编辑补偿器参数的详细信息,请参见使用补偿器金宝app编辑器调整Simulink块。

当调谐补偿器满足设计要求时,稳定时间超过30秒。要缩短沉降时间,请调整P和我手动调整控制器的参数。
例如,将补偿器参数设置为:
P=
4.我=
0.1
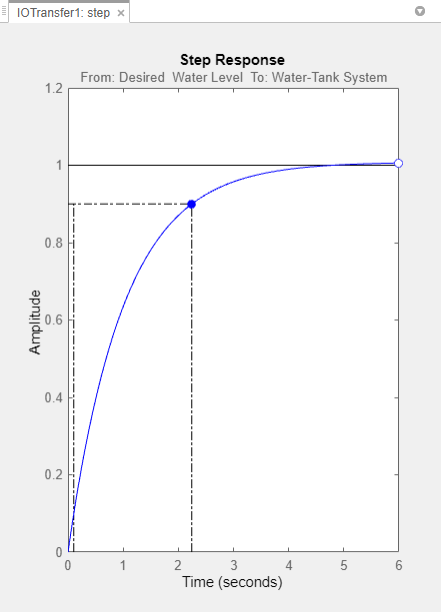
该补偿器产生具有以下特性的闭环响应:
最大超调量为0.206%。
上升时间为1.74秒。
沉淀时间约3秒。
用计算机模拟闭环系统金宝app
通过用调谐控制器参数模拟非线性Simulink模型来验证补偿器的设计。金宝app
将调谐补偿器参数写入PID控制器街区,在控制系统设计,在控制系统选项卡,单击更新块。
在Simuli金宝appnk模型窗口中,运行仿真。
要查看闭环模拟输出,双击范围块

非线性系统的闭环响应满足设计要求,上升时间小于5秒,超调极小。
另见
相关的话题
你也可以从以下列表中选择一个网站: