在此处查找演示如何使用此工具箱的视频:
//www.tatmou.com/videos/series/student-competition-mobile-robotics-training.html
>>使用Simulation Map Generator应用程序导入课程/场地的格式化地图/草图/图片,为线路跟踪和障碍物检测应用程序生成模拟地图。
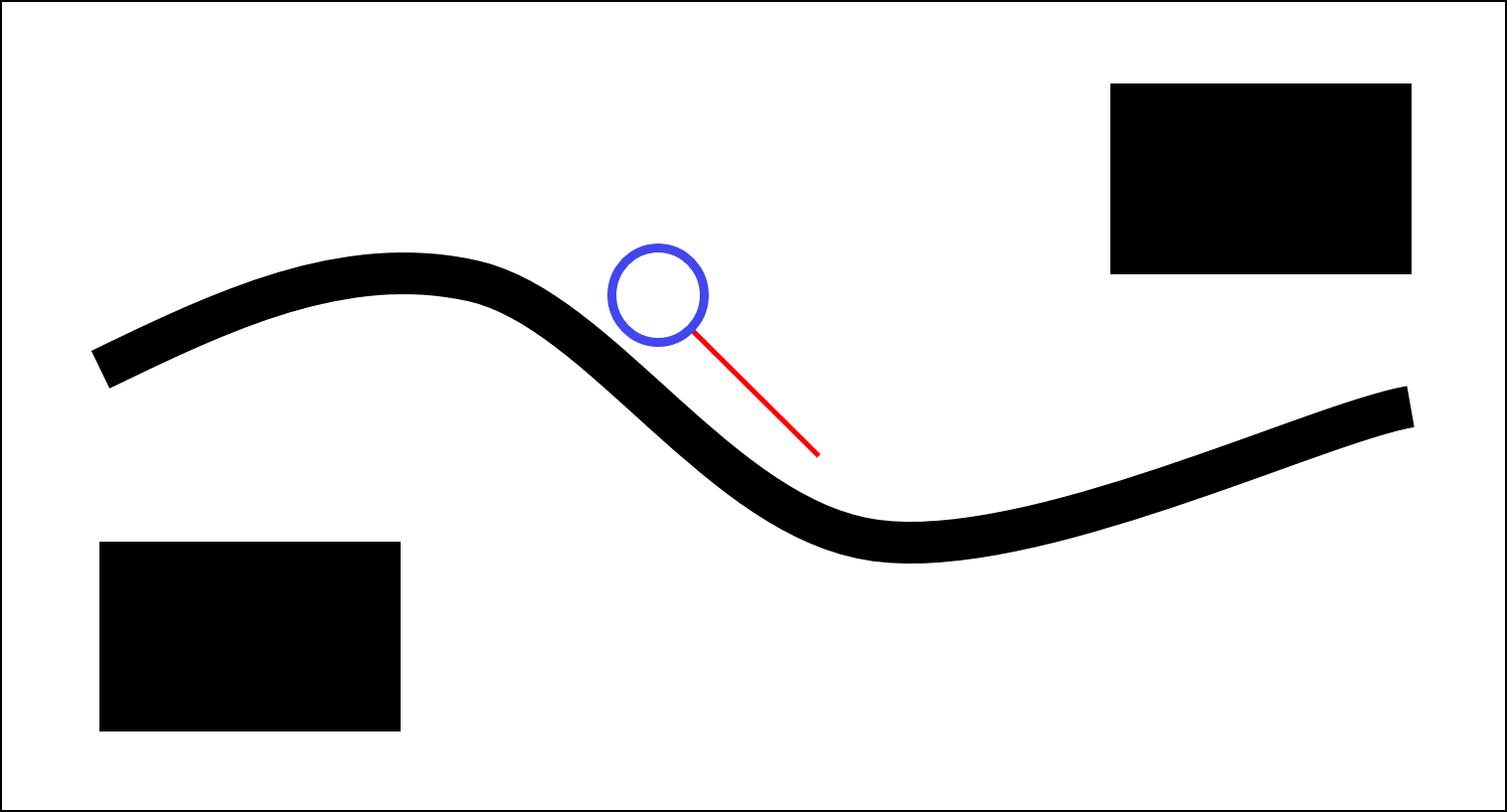
使用移动机器人训练库模块(如编码器、线传感器和超声波传感器仿真)来模拟闭环移动机器人系统。该库附带一个机器人模拟器,帮助可视化差动驱动机器人运动学。
引用为
MathWorks学生竞赛团队(2020年)。移动机器人训练工具箱(//www.tatmou.com/matlabcentral/fileexchange/62961-mobile-robotics-training-toolbox),MATLAB中央文件交换。恢复.
意见及评分(9)
更新
| 1.2 | 在说明中添加了视频教程的链接 |
|
| 1.1 | 1.1-在示例模型中修复了与状态流相关的错误。 |
|
| 1.0.0.0 | 1.0-更新缩略图图像。 |
MATLAB版本兼容性
使用R2017a创建
与任何版本兼容
平台兼容性
窗户 马科斯 Linux标签
移动机器人培训图书馆
移动机器人培训图书馆
您还可以从以下列表中选择网站:
“软实时”块是为了放慢动画模拟的速度。在较新的MATLAB版本中,建议删除块,而不是设置模拟节奏。它是包含在“运行”按钮中的一个选项,请参阅下面的链接了解更多信息。
//www.tatmou.com/help/金宝appsimulink/ug/simulation-pacing.html
如果这是不可能的,那么请确保您在MATLAB中有一个有效的编译器设置,然后重新安装工具箱。
我正在youtube上学习移动机器人技术:控制机器人运动教程。我得到以下错误。
S功能“r11/机器人模拟器/软实时”中出错:S功能“sfun_Time”不存在。
请让我知道,如何解决这个问题?
@TEJAS,你需要在不同的电机电压下运行一些实验来测量角速度。确保在操作负载下运行这些实验。希望这有帮助。
如何获取特定电机的电机参数并获取查找表?
杰出的
谢谢(y)