导航工具箱
계획 및 내비게이션 알고리즘을 설계, 시뮬레이션 및 배포할 수 있습니다.
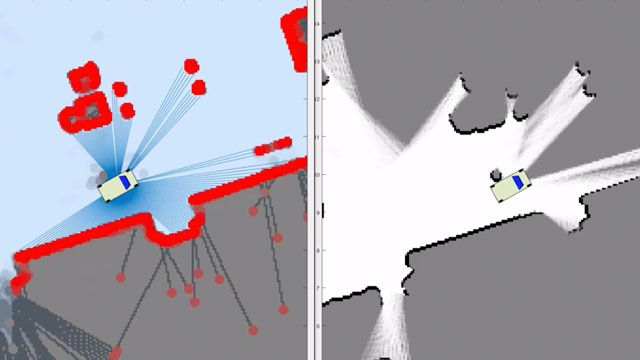
导航工具箱™에는 모션 계획, 猛击(동시적 위치추정 및 지도작성), 관성 항법을 위한 알고리즘과 분석 툴이 있습니다. 툴박스에는 사용자 지정 가능한 탐색, 샘플링 기반 경로 플래너 및 경로 검증과 비교를 위한 메트릭도 있습니다. 2.차원 및 3.차원 지도 표현을 만들고 砰地关上알고리즘을 사용하여 지도를 생성하며, SLAM地图生成器앱으로 대화형 방식으로 지도 생성을 시각화하고 디버그할 수 있습니다. 위치추정을 위한 센서 모델과 알고리즘도 툴박스에 제공되어 있습니다. IMU,全球定位系统,휠 인코더 센서 데이터를 시뮬레이션하고 시각화할 수 있고 멀티센서 자세 추정을 위해 융합 필터를 조정할 수 있습니다.
자율주행, 로봇공학 및 가전제품 응용 분야에 대한 참조 예제를 제공합니다. 내비게이션 알고리즘을 하드웨어에 직접 배포해서 테스트할 수 있습니다. (MATLAB)编码器™ 또는 Si金宝appmulink编码器™ 사용)



제품 리소스:
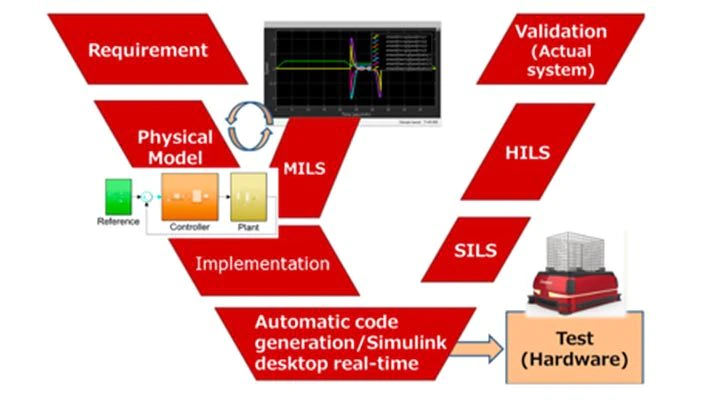
"우리는 MATLAB및 模金宝app拟를 사용하여 한 달 안에 모션 제어기 프로토타입을 설계하고 하드웨어에 테스트할 수 있었습니다. 시뮬레이션을 수행하여 위치추정 알고리즘을 평가하고 문제를 명확히 파악할 수 있었습니다."
武藏精光实业有限公司竹本春树和Kenneth Renny Simba。


