MATLAB및Si金宝appmulink를사용한자율주행
MATLAB®,仿金宝app真软件®및走鹃를통해엔지니어는실제세계의거동에대한이해를높이고차량테스트를줄이고임베디드소프트웨어의기능을검증하여자율주행인식,계획및제어시스템설계를발전시킬수있습니다。MATLAB및Si金宝appmulink를사용하여다음과같은작업을수행할수있습니다。
- 데이터액세스,시각화및레이블지정
- 주행시나리오시뮬레이션
- 계획및제어알고리즘설계
- 식알고리즘설계
- 코드생성을사용한알고리즘배포
- 통합및테스트

MATLAB및Si金宝appmulink을사용한자율주행사례보기




주행시나리오시뮬레이션
입방체 및虚幻引擎®시뮬레이션환경을MATLAB과함께사용하여가상시나리오에서알고리즘을개발하고테스트할수있습니다。
입방체환경은행위자를단순한그래픽으로시하며확률센서모델을사용합니다。이환경은제어,센서융합및모션계획에사용할수있습니다。
虚幻引擎환경을사용하여인식및입방체환경사용사례를위한알고리즘을개발할수있습니다。RoadRunner를사용하면MATLAB및Simu金宝applink,그리고CARLA, Vires VTD및NVIDIA Drive Sim®등의시뮬레이터에서사용할장면을설계할수있습니다。또한RoadRunner는FBX®, OpenDRIVE®와같은업계준파일형식으로의내보내기를지원합니다。


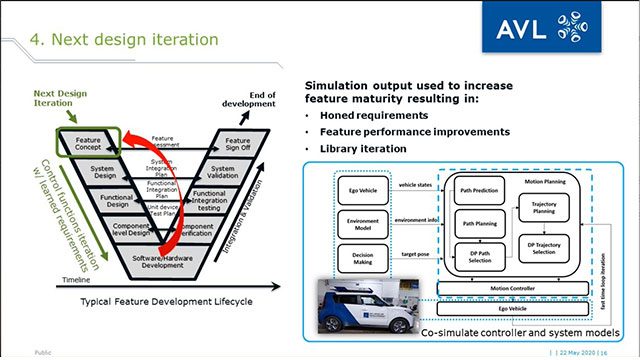
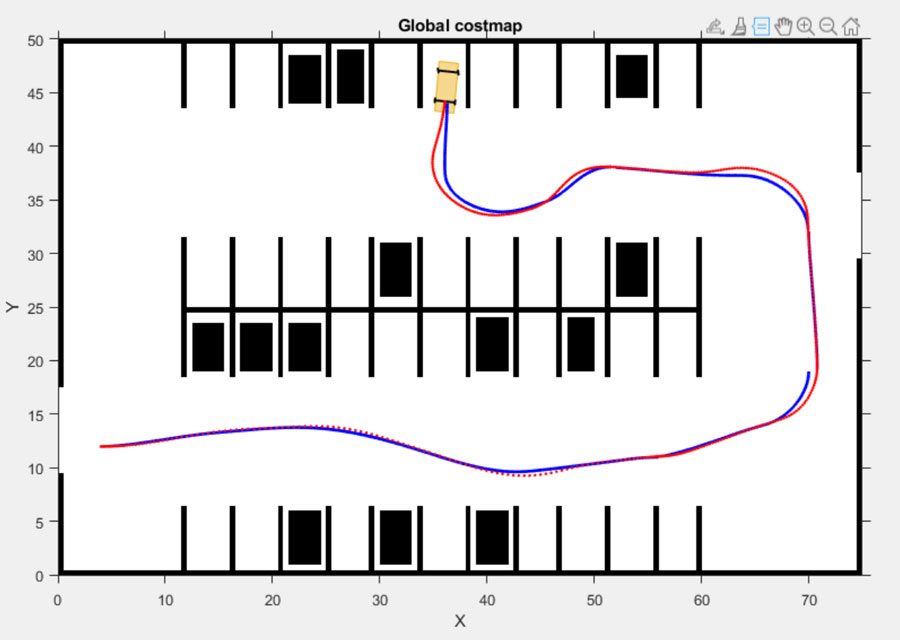
계획및제어알고리즘설계
MATLAB및仿真金宝app软件를사용하여경로계획및제어알고리즘을개발할수있습니다。자율주행차량이계획된궤적을따르도록하는횡방향및종방향제어기를사용하여차량제어시스템을설계할수있습니다。
2또한차원및3차원시뮬레이션환경과함께센서모델과차량동특성모델을사용하여알고리즘을종합적으로테스트할수도있습니다。

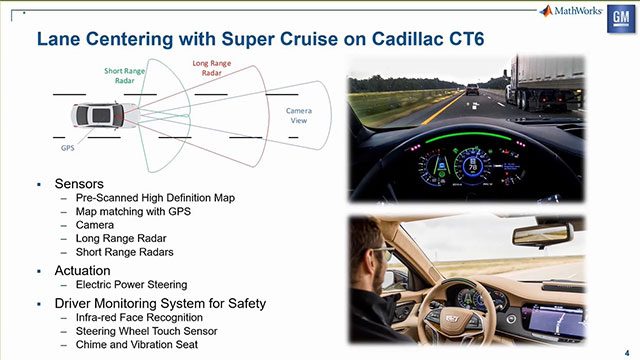
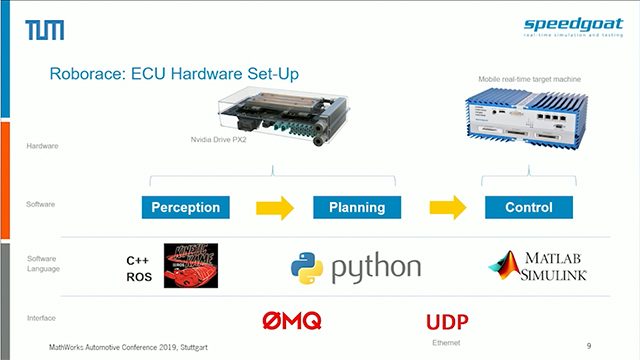
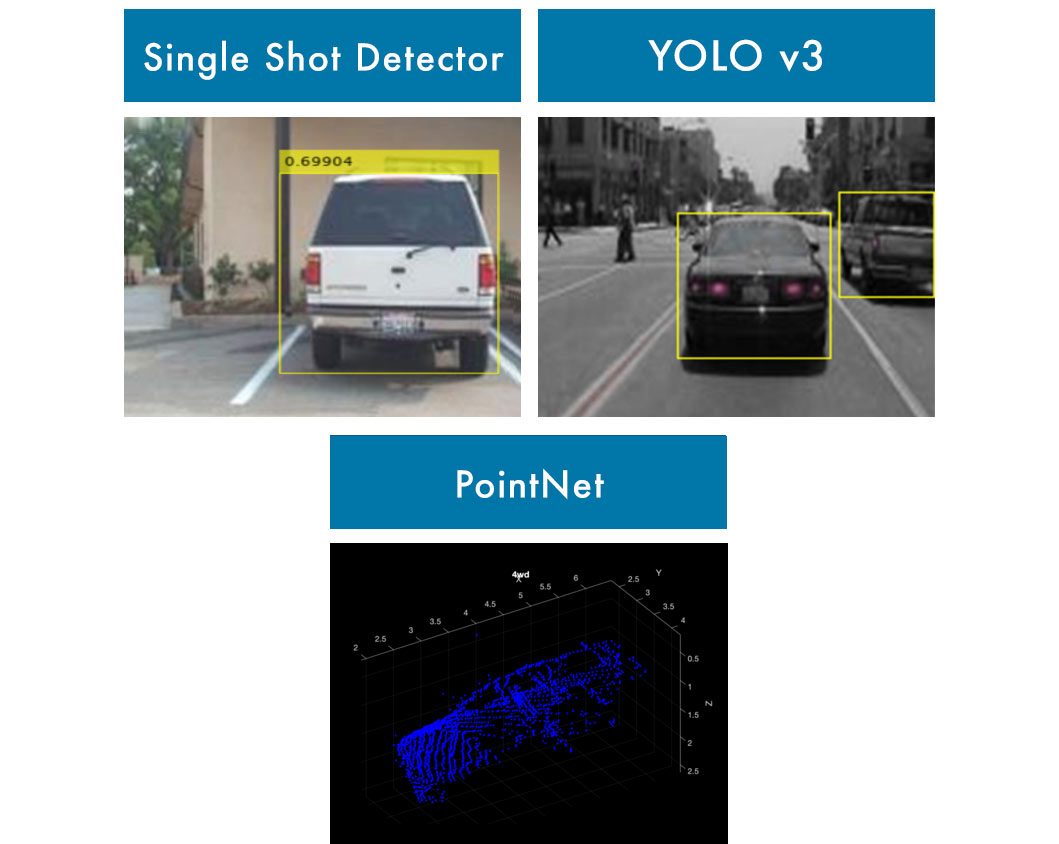
식알고리즘설계
카메라,라이다및레이더의데이터를사용하여,식알고리즘을개발할수있습니다。인식알고리즘에는검출,추적,위치추정이포함되며,이를자동제동,조향,지도작성및주행거리측정과같은응용분야에사용할수있습니다。
이러한알고리즘은긴급제동및조향과같은ADAS응용사례의일부로구현할수있습니다。
MATLAB을사용하여센서융합,大满贯(동시적위치추정및지도작성),지도작성및주행거리측정을위한알고리즘을개발할수있습니다。

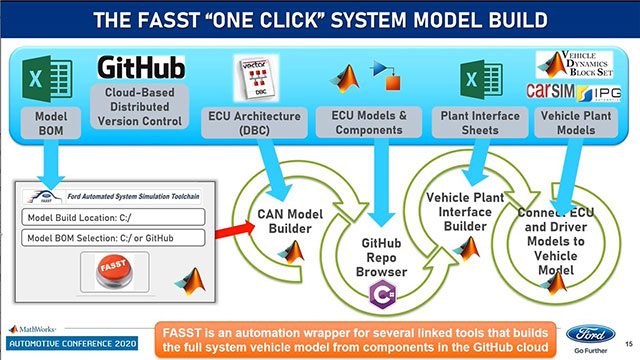
알고리즘배포
코드생성워크플로를사용하여인식,계획및제어알고리즘을하드웨어에배포할수있습니다。지원되는코드생성언어에는c, c++, cuda®, Verilog®,硬件描述语言(VHDL)®이있습니다。
또한ROS, AUTOSAR와같은서비스지향아키텍처에알고리즘을배포할수도있습니다。
자동으로생성된코드를사용하여센서와다른ECU구성明文소를연결할수있습니다。英伟达,英特尔®、手臂®등의하드웨어를포함한여러배포타겟이지원됩니다。
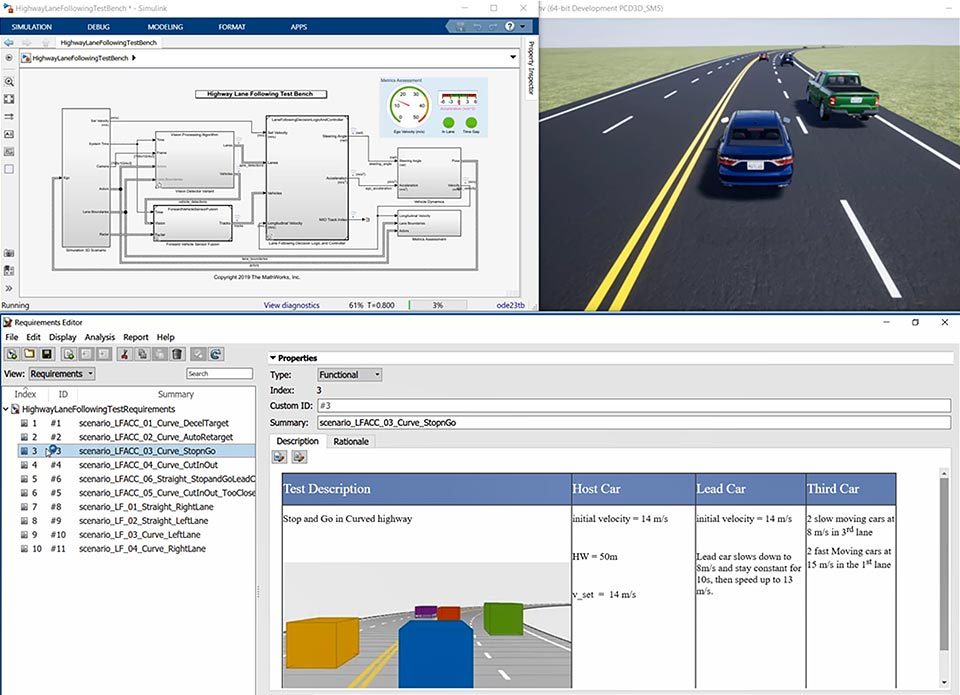
통합및테스트
식,계획,제어시스템을통합하고테스트할수있습니다。金宝app仿真软件需求™를사용하여요구사항을캡처하고관리할수있습니다。또한仿金宝app真软件测试™를사용하여테스트케이스를병렬로실행하고자동화할수있습니다。

도와드릴방법을알려주십시오。
고객맞춤형평가판을원하시거나필고객맞춤형평가판을원하시거나필。

질문이있습니까?
자율주행전문가와상의해보십시오。