R2020B中的优化实时编辑器任务使您可以交互式设置并使用Live Editor运行优化。它指导您通过指定问题和探索选项的过程。与所有实时任务一样,它会自动生成与您的选择相对应的MATLAB代码,您可以在其他应用程序中使用,并使其他人能够快速复制您的发现。
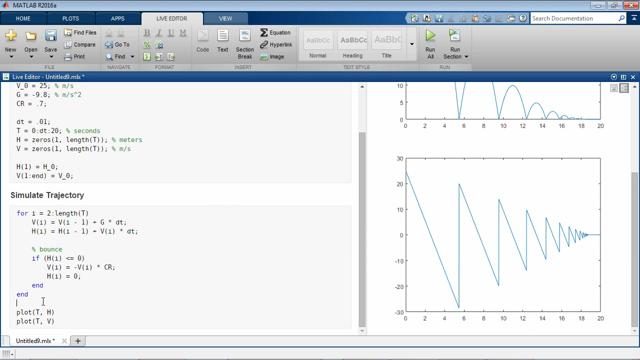
作为一个例子,我们将找到一个半径为R的圆上的Rosenbrock函数在x和y上的最小值。
我们将打开一个新的Live Script,并在顶部添加一个部分,在那里我们指定了一些稍后可以轻松更改的参数,即圆的半径和初始起点。我们将快速运行这一节,将变量放入工作区中。
然后,我们将导航到这里,插入Optimize Live Task。
根据目标和约束条件的不同,解决者的列表将改变为能够解决问题的列表。如果你想了解更多关于求解器,点击此图标打开相关文档。
在RosenBrock函数的情况下,我们最小化了低于下限和上限和非线性约束的非线性函数。我们将使用推荐的求解器。
非线性目标如Rosenbrock函数被指定为MATLAB函数。您可以从文件中指定现有函数、Live Script本地函数或创建一个新函数。让我们在Live Script中创建一个局部函数。在输入详细信息之后,我们将返回任务并确保它已被选中。
初始点将设置为我们之前定义的变量。我们可以根据需要在此改变它,并迅速重新运行我们的代码。在输入我们绑定的约束后,我们需要定义我们的非线性约束,也将在新的本地功能中指定。
这是与我们的约束相对应的代码。作为快速概述,C的非正值满足约束,而正值则不满足。由于我们没有非线性平等约束,因此CEQ被设置为空数组。选择实时任务中的约束函数并设置其参数。最后,我们将指定我们希望看到的情节。
我们都准备好了。请注意,与其他Live Tasks不同的是,自动运行按钮默认是关闭的,因为在问题完全设置好之前运行求解器是没有意义的。让我们运行脚本,看看得到了什么。
我们可以从选项菜单中生成用于重新生成这些结果的代码。您可以在应用程序中使用此代码或与他人共享它。
最后一件事是您可以为求解器指定其他选项。例如,我们可以运行不同的算法,看看它是否更快地运行或收敛到不同的本地解决方案。在这种情况下,算法较少迭代并将其收敛到与以前相同的解决方案。
使用优化实时任务以交互式设置并运行优化。要了解更多信息,请在下面的链接中签出文档或直接从应用程序访问它。