了解模型预测控制
在本系列中,您将了解模型预测控制(MPC)是如何工作的,并将发现这种多变量控制技术的好处。
MPC使用一个系统模型来预测系统未来的行为。MPC解决了一个在线优化算法,以找到最优的控制动作,驱动预测输出到参考。MPC可以处理多输入多输出系统,它们的输入和输出之间可能有交互作用。它还可以处理输入和输出约束。MPC具有预览功能;它可以将未来的参考信息整合到控制问题中,以提高控制器的性能。
本系列还讨论了MPC设计参数,如控制器采样时间、预测和控制范围、约束和权重。它还提供了选择这些参数的建议。您将了解自适应、增益调度和非线性MPC,并将获得实现技巧,以减少MPC的计算复杂性,并更快地运行它。
最后,给出了在MATLAB中设计MPC控制器的实例®和仿真软金宝app件®.

第1部分:为什么使用MPC?了解模型预测控制(MPC)。MPC处理具有输入输出交互作用的MIMO系统,处理约束,具有预览功能,并用于汽车和航空航天等行业。
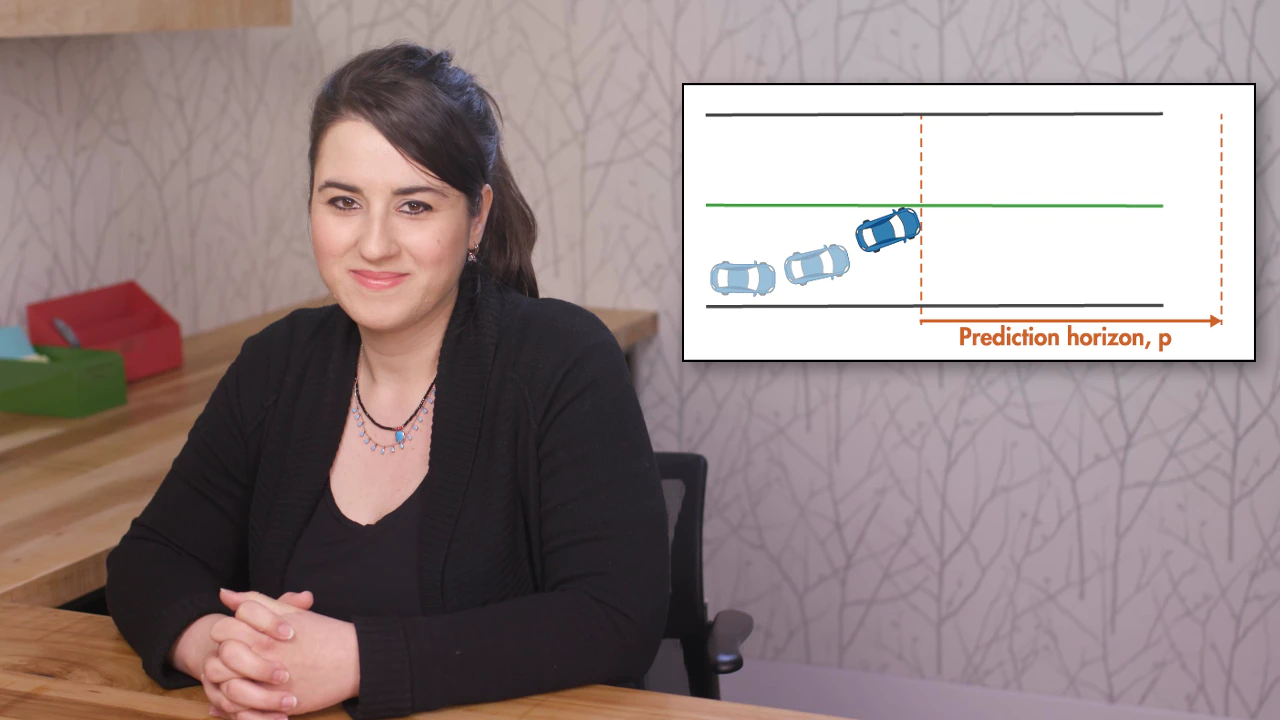
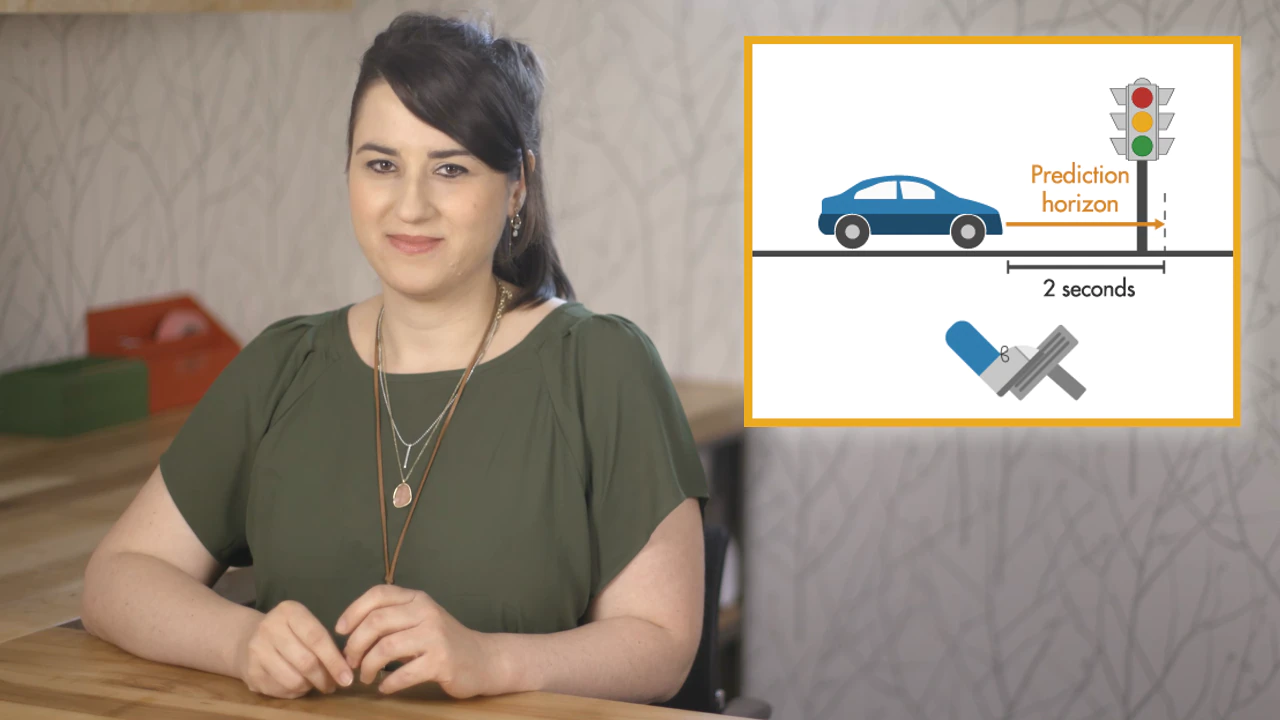
第二部分:什么是MPC?了解模型预测控制(MPC)的工作原理。MPC使用一个工厂模型来预测未来工厂的产量。它在每个时间步骤中解决一个优化问题,以找到最优控制动作,使预测的工厂产量尽可能接近期望的参考。
第3部分:MPC设计参数为了成功地使用MPC控制系统,需要仔细选择设计参数。学习如何选择控制器样本时间,预测和控制范围,以及约束和权重。

第4部分:自适应,增益调度和非线性MPC根据您的工厂模型、约束条件和成本函数了解您可以使用的MPC控制器类型。可选方案包括线性时不变、自适应、增益调度和非线性MPC。

第五部分:如何更快地运行MPC学习哪些技术可以让MPC运行得更快。该视频概述了一些方法,如显式MPC和次优解决方案,您可以用较小的示例时间实现应用程序。
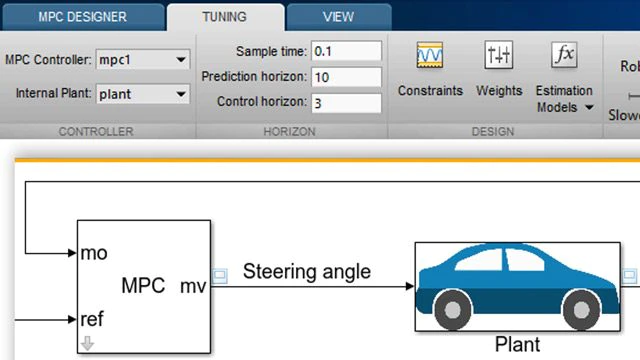
第6部分:如何用Simulink和模型预测控制工具箱设计MPC控制器金宝app学习如何使用模型预测控制工具箱为自动车辆转向系统设计MPC控制器。
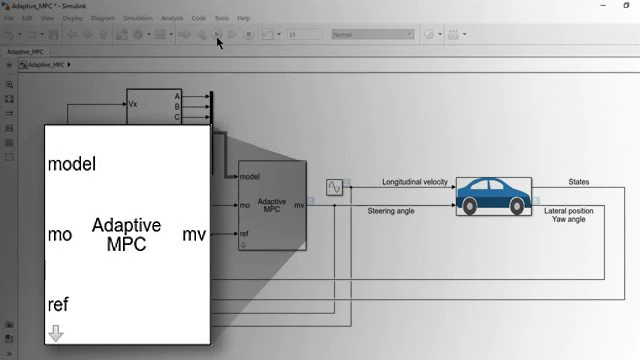
使用Simulink和模型预测控制工具箱的自适应MPC设计金宝app学习如何使用适应性MPC处理不断变化的植物动态。本视频以自动转向车辆系统为例,演示控制器的设计。
你也可以从以下列表中选择一个网站: