模型预测控制工具箱
diseñeysimule controladores predictivos de modelos
模型预测控制工具箱™proporciona funciones,Una应用程序y bloques de simulink金宝app®para diseñar相似控制器的中位控制预测模型(MPC)线性和非线性。它允许特殊的植物扰动模型,水平模型,限制模型和比索。对塞拉多的模拟控制进行评估。
请在ejecución的时间内,对比索进行限制。Esta工具箱比例解决optimización可拆卸的y también允许利用一个解决个人。在没有线性控制的情况下,实施控制的MPC适应性,在planificación的ganancia没有线性。在必须的情况下rápidas,这个工具箱允许一个控制者预测模型explícito一个控制者正常实施的部分solución aproximada。
Para ElProtipadoRápidoYLaimenticaCióndeSistemasEmbebidos,Cantuido El despliegue de Solvers deOptimización,Esta ToolboS Soporta LaGeneracióndeCódigoCYSeDodoTextoStructurado IEC 61131-3。
MásfiginaCión:
- Diseñodopartadorespredictivos de modelos
- aplicaciones deconducciónautónoma
- Controladores Predictivos de Modelos Lineales
- Especificación de parámetros, estimación del estado y revisión del diseño de MPC
- Ajuste deparámetrosysupervisióndel rendimiento en tiempo deEjecución
- MideverAcióndoprinadores预测凡德ModelosRápidos

DocumentoTécnicoGratuito.
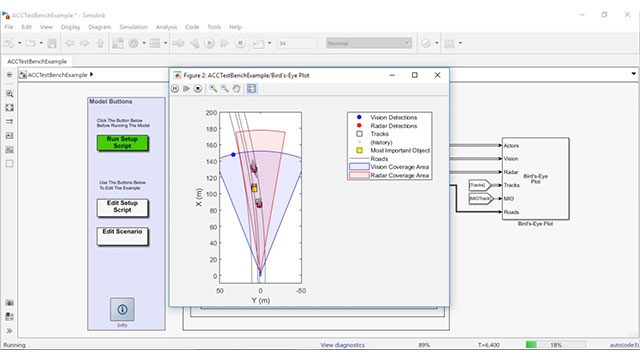
ImpileSacióndeNodgeadadorde Crucero Adaptativo Con Simulink金宝app
APP MPC Designer.
DiseñeControlAdoresMPC de Manera Interactiva DefirdiendoUn Modelo de Planta Interno水平方向不变,限制范围不变。有效地控制了simulación的中间场景。比较变量控制器MPC的最后respuestas。
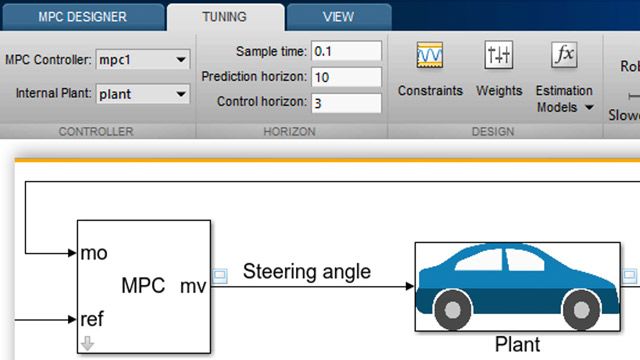
diseñode mpc en s金宝appimulink
在Simulink中,模型模拟控制器控制MPC,而模型模拟控制器控制在工具金宝app箱中。在Simulink的线性模型中计算在时间上线性不变的情况下控制MP金宝appC的线性模型,并记录在中间值上的名称金宝appSimulink Control Design™。

Diseño de MPC en MATLAB
Usily Funciones en lalíneadecandosparadiseñarcontroladores mpc。Defina Un Modelo de Planta Interno Y Ajuste Los Pesos,LAS restricciones Y OtrosParámetrosdel Controlador。Simule La Respuesta del Sistema de Bucle Corrado Para Evaluar El Rendimiento del Controlador。

Diseño de controladores MPC en la línea de comandos。
Bloques predefinidos.
利用LOS Bloques自适应巡航控制系统,车道保持辅助系统Y路径跟随控制系统COMO PUNTO DE PARTIDA PARA SU APLICACIONON ADAS,Y Personalice ElDiseñoSegún海内诺索。GenereCódigodesde Los Bloques Predefinidos Para El Despliegue en El Vectiulo。

Uso del Bloque Predefinido de 金宝appsimulink paradiseñarsistemas de Contron de Crucero Adaptativo。
参考的应用程序
UseCareCiones de参考资料段Deferjiones oferjo de trabajo destinado adiseñary desplar controladores mpc para sistemas deconducciónautónoma。Los Ejemertos de Aplicaciones de EverlenciaTambiénMuestranCómoSePuedenMovell Distintas Pittes del Sistema Con Diverentes Niveles de Fidelidad。
MPC Lineal.
Disceñe联合国控制机MPC Lineal EqcificandoO UN Modelo De Planta Interno Como联合国SISTema Lineal en En El Tiempo(LTI)CreaeCon Control System Toolbox™,o Bien Linealizando Un Modelo De Simulink Con Simulink Co金宝appnsogn设计。TambiénPuedeImportAl UN MOLUDO CREADO A Partir de Datos Medidos de entinada y Salida Mediante系统识别工具箱™。

EspecificacióndeMocalode Planta Interno Para UnDiseñoDeMPCLineal。
MPC Adaptativo.
DiseñeySimuleControlAdores MPC Adaptativos Usando Funciones en La LiNea de Comandos Y El Bloque Adaptive MPC控制器。Astalyice El Modelo de Planta en Tiempo deEjecuciónyproporciónelocomoinoinnorconador。Utily UNFRORO de Kalman Lineal Variante En El Tiempo(LTV)IntegradoConAníadeAstabilidadSasintótica帕拉维斯卡·德尔·斯塔纳·恩控制地区预测鉴定戈斯德Modelos Adaptativos。

MPC会议planificación de ganancia
Controle Plantas No Lineales EN UNA Amplia Variedad de Condiciones Operativas Con El Bloque多MPC控制器。Disceñe联合国控制员MPC帕拉CADA Punto Operativo Y Cambie De Controlador en Tiempo deEjecución。

USO Del Bloque多MPC控制器ParaDiseñarControladoresMPC ConPlanicacióndeGanancia。
Especificación de parámetros, estimación del estado y revisión del diseño de MPC
Mejore de Manera Iterativa ElDiseñodel Controladorifiendo Un Modelo de Planta Interno,Ajustando LosParámetrosdel Controladador Y Simulando La Respuesta del Sistema de Bucle Cerrado Para Evaluar El Rendimiento del Controlador。修改El Controlador Para Detectar Posibles问题dediseño。
Parámetrosdel Controlador.
Despuésde Demaveir El Modelo de Planta Interno,Complient ElDiseñodel Controlador MPC Especificando El Tiempo de Muestreo,Los Horizocties dePredicciónyConvallyscoplyscenala,Las Restricciones de Intrada Y Salida,Y Los Pesos。Esta ToolboxTambiénes兼容Con El Suavizado de Las Restricciones,Y Con Restricciones Y Pesos Variantes en En El Tiempo。

EspecificacióndeLosParámetrosdel Controlador en La App MPC设计师。
估计德尔斯塔多
estime los estados del Controlador a partir de salidas medidas con el eltime de estado interlado。TambiénPuedeUtilizar联合国Algoritmo PersonalizoO Para Enferar El Estado。

Ergnacióndel estado perserfizadada。
Revisióndeldiseño.
检测位置博德斯·塞尔德斯en El Controlador MPC Mediante LaFuncióndedatumoInclicators。Usilico洛杉矶Ajustar Los Pesos Y Las Restricciones Durante ElDiseñodel Controlador y evitar fallos en tiempo deejecución。

Mejora del diseño del controlador siguiendo las recommended aciones del informe de revisión del diseño。
Ajuste deparámetrosen tiempo deejecución
Ajuste Los Pesos y Las Restricciones del Controlador MPC Para Optimizar苏Rendimiento en Tiempo deEjecuciónInnecesidaddeRediseñarloo reimplementarlo。Equice El Ajuste del Controlador en Tiempo deEjecuciónTantoen Matlab®como zhi金宝app simulink。

在ejecución的时间范围内对比索进行限制。
SupervisióndelRendimientoen Tiempo deEjecución
在señal del estado的optimización为偶然发生的情况下为optimización不收敛。它在información para tomar的决定,冷静的控制的策略,这是法律的副本。

Deteccióndefallosdel Controlador en Tiempo Real。
MPCExplícito.
Genere Un Controlador MPCExplícitoa partil deldiseñode联合国MPCImplícitoPara Acelerar LaEjecución。Simplifique Un Controlador MPC ExplisCito Generado Para Reducir El Uso de Memoria。

WeneracióndeNodgeadadorMPC ExpliceCito APartícitoPeviaMente的PartícitoScondipmente。
Solucion aproximada (suboptima)
Diseñe,如果控制者MPC的时间是ejecución,那么该控制者的时间将是solución (subóptima)。

Comparación de los tiempos de ejecución de una solución óptima y otra aproximada (subóptima)。
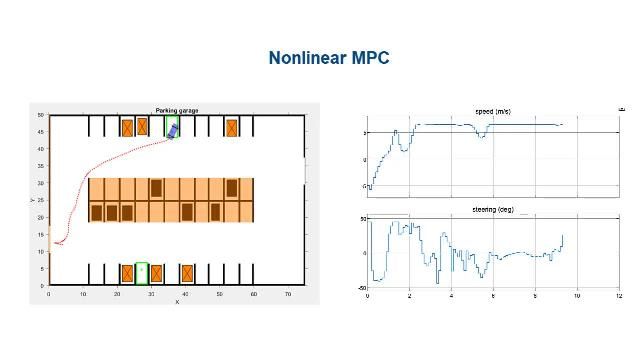
Planificacion最适条件
利用控制器的MPC没有线性,适用于planificación óptima的要求一个模型,没有线性的成本和限制,没有线性。

Optimización de trayectoria y控制的一个机器人volador中间MPC没有线性。
Sistemas de Control deRetroalimentación
Simule联合国Sistema de Control de Bucle Cerrado de Plantas没有Lineales Con花费y restricciones没有Lineales。De Forma Predeterminada,LOS ControlAdores MPC No Lineales Utilizan Optimization Toolbox™Para Regarver EL问题AceProgramión没有Lineal。TambiénPuende特别是苏布里奥求解器没有Lineal Personalizado。

控制模型的预测系统没有反应堆的线性分布químico exotérmico。
MPCEconómico
DiseñeControlAdoresMPC ECON-MICOS Para Optimizar El Controlador Para UnaFuncióndeCosteArbitraria Con Restricciones No Lineales Arbitrarias。Puede Uterizar联合国Modelo dePredicciónLinealO No Lineal,UnaFuncióndeGosee没有Lineal Personalizada Y Restricciones No Lineales Personalizas。

Sistema de Control MPCEconómicopara laProduccióndeóxidodeetileno。
GeneracióndeCódigoConMatlab Y Simu金宝applink
Diseñe un controlador MPC en 金宝appSimulink y genere código Co texto estructurado IEC 61131-3 mediante Simulink Coder™o Simulink PLC Coder™,分别。利用MATLAB Coder™para generar código C en MATLAB y despliéguelo para sistemas de控制实时。También puede utilzar MATLAB Compiler™para empaquetar y comppartir su controlador MPC como aplicación独立。

Fillacióndecódigoc a partil del Bloque MPC控制器。
求解器整合面
GenereCódigodesde los solvers deprogramaciónuadrática(qp)de conjunto activo y de punto室内proporcionados para lograr unamideveraciónefitiede en procesadores embebidos。Para问题没有Lineales,Utilice El Solver DeProgramAciónCuadráticaSecuencial(SQP)De Optimization Toolbox Para Simular Y GenerarCódigo。despliegue elcódigogenerado en la cantidad de procesadores que desee。

求解器整合。
解决personalizados
利用求解QP和NLP (programación无线性)的力PRO deembotech.para simular y generarcódigopara controladores mpc lineales y no lineales。Si Lo Prefiere,Utilice Solvers QP Y NLP Perselfizados Para Simular Y GenerarCódigo。

Solver QP Personalizado Para LaSimulaciónyLaferacióndeCódigo。