奇怪。没有你的模型难以解决。你能请联系技术支持吗?金宝app
我得到的PID控制器具有南价值。(模型)金宝app
21日视图(30天)
显示旧的评论
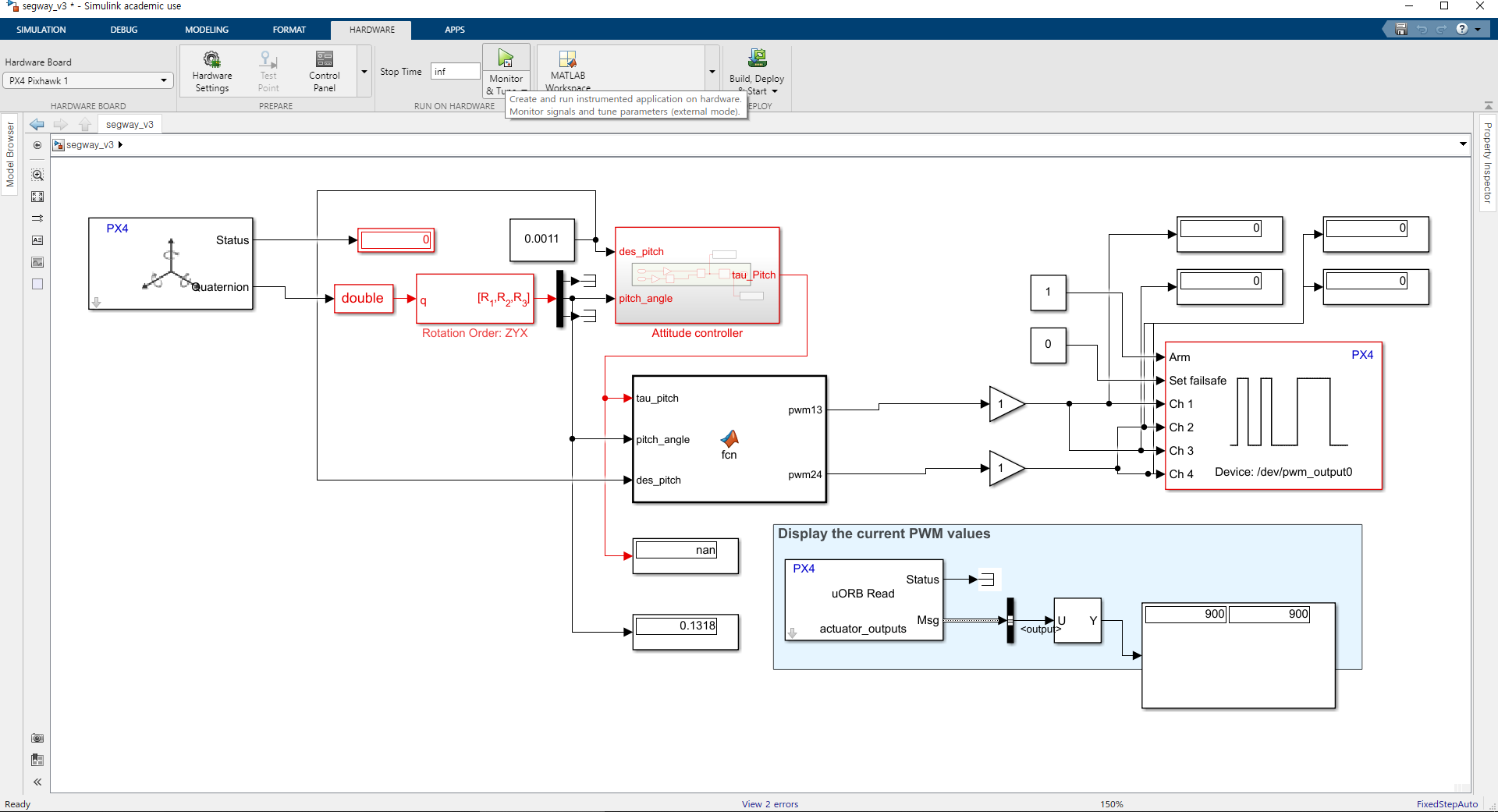
控制与PID控制器赛格威和我有一个问题关于PID控制器。
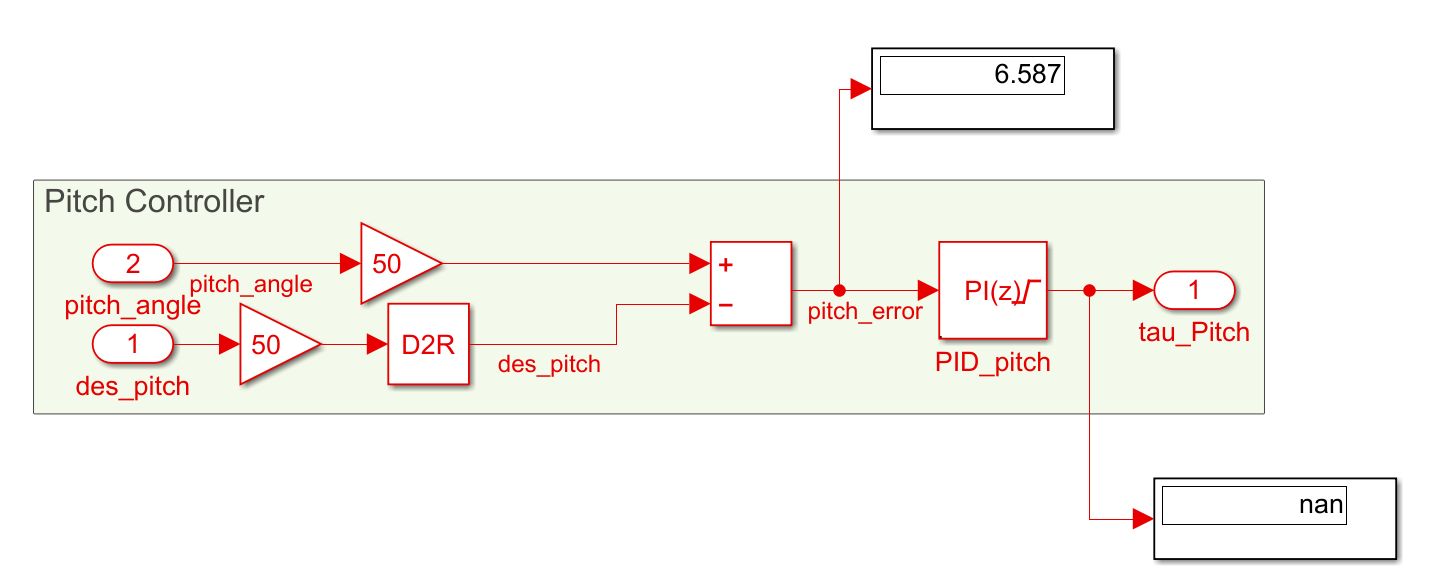
从上面的图片中,PID控制器的输入块(PI控制器在这幅图片中,然而,所有控制器包含积分增益有同样的问题)非南价值,然而,PID控制器的输出是南。
我检查所有的数据类型和没有问题。
音调控制器的两个输入我的硬件和他们的态度也是正常的整数。
我不知道为什么南PID控制器的输出值。
同样,当我改变pitch_angle成常数块的输入(如。0.1318),PID正常价值。
我怎样才能解决我的问题吗?