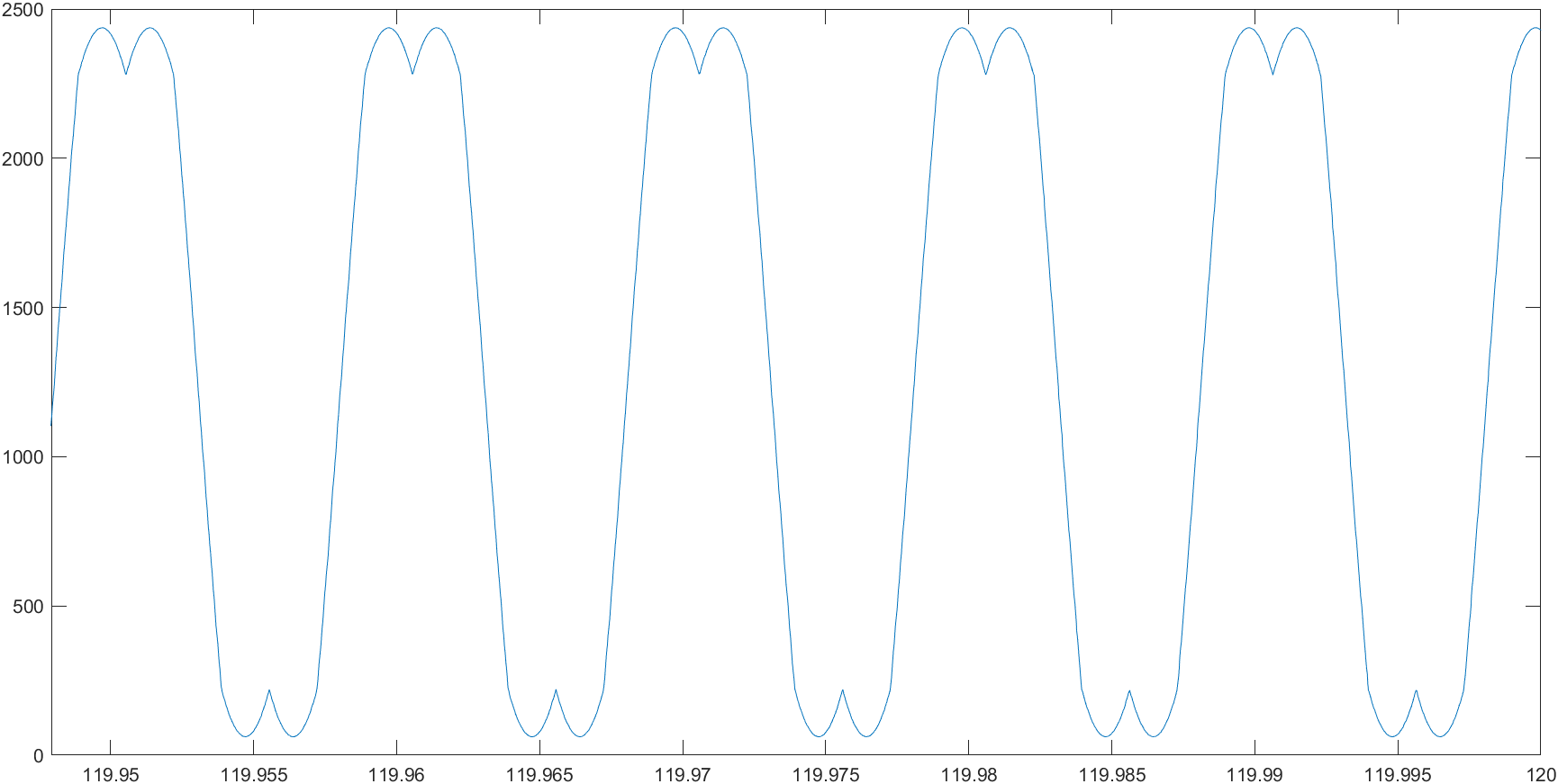
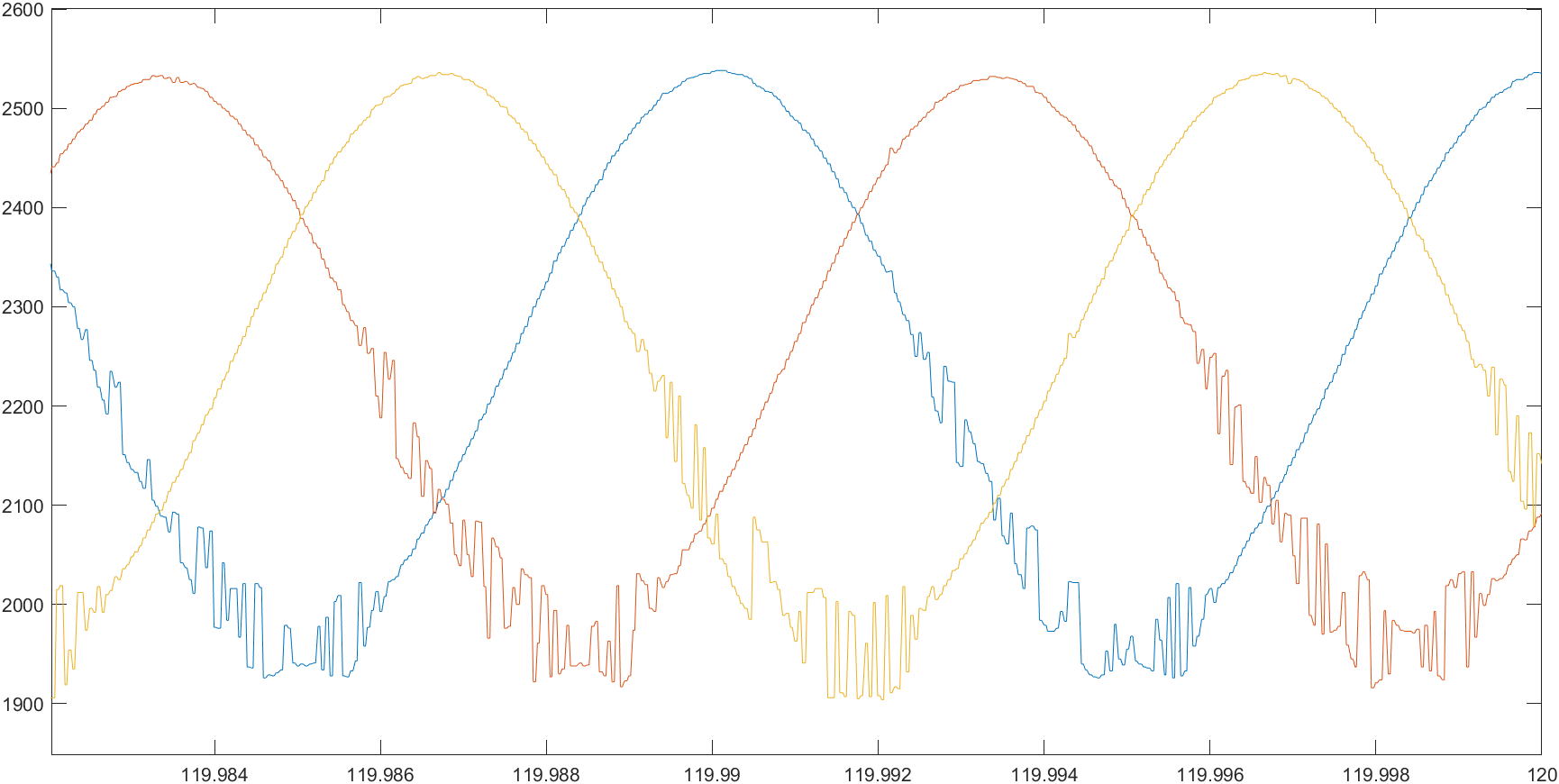

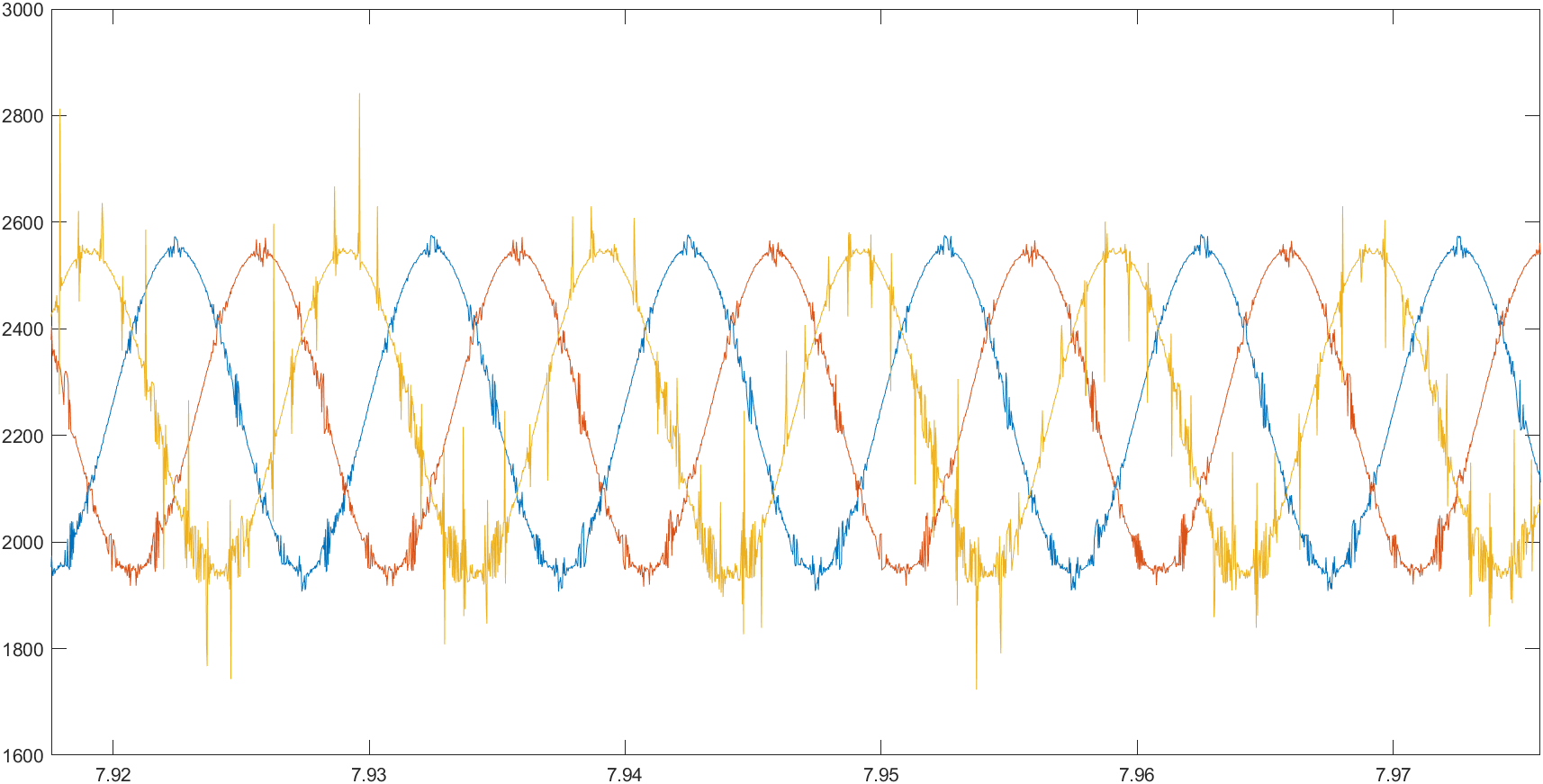
更新:几个小时后重建我的模型,改变设置来回,我“被困”下面的波形,调幅100%:
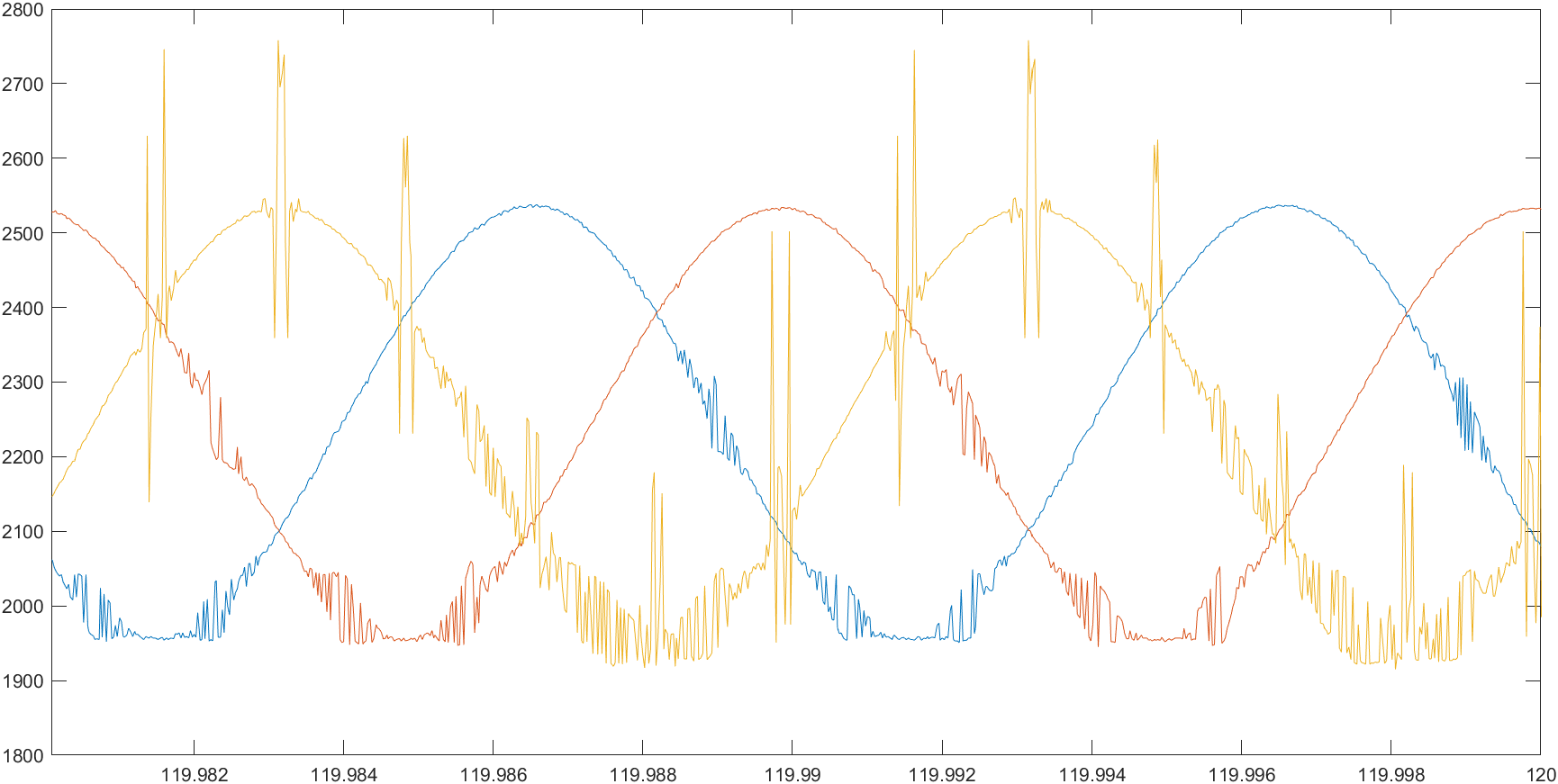
由于COVID-19措施,我不能去我的大学和使用示波器和当前调查几个星期,但是我得到了董事会和三个LEM LA-55P电流传感器,从实验室coleague。我也有一个古老的和廉价PC示波器,非常有限,但总比没有好。使用电流传感器和电脑示波器,这就是我获得的:
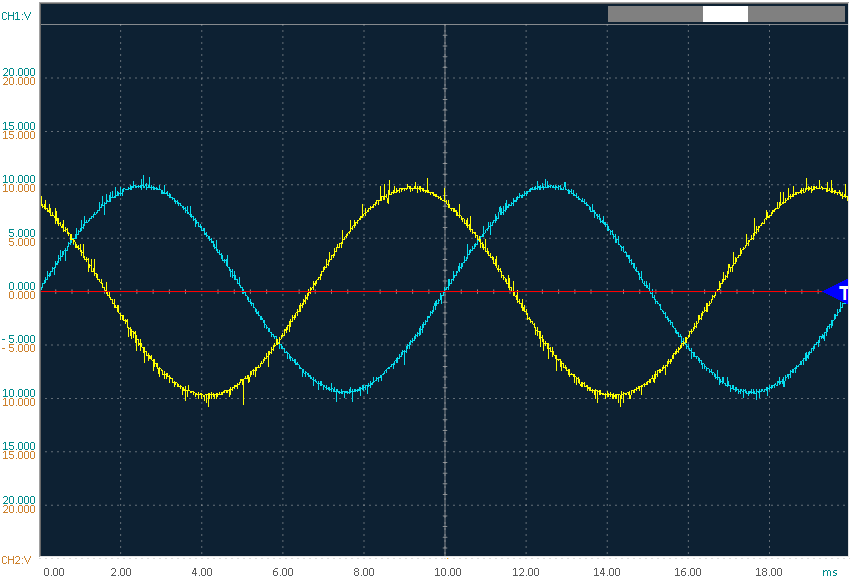
2 / div女士是时间价值最高的,采样率为625千赫。5 ms / div,降至39 khz,开关频率以下,不能显示太多的细节。所示的波形数据都创造了在相同的参数下,但不是在同一时间,因为没有同步PC示波器和数据日志记录。
蓝色的阶段我的示波器是一样的MATLAB的蓝色阶段(阶段),和黄色的阶段我的示波器是一样的MATLAB的黄色阶段(C阶段,“丑”)。我的电脑示波器只有2个频道。与当前传感器和电脑示波器的波形似乎……很好。小噪声或甚至但不是接近一样坏BOOSTXL-3PhGaNInv电流传感器获得的数据。
不幸的是,我没有足够的组件进行信号调整器喂LAUNCHXL-F28379D LA-55P传感器产生的信号,应按比例缩小和弥补(0 ~ 3.3 v范围内),所以我不能获得“健康”与单片机的信号
因此,我发出召唤怀疑没什么错当前BOOSTXL-3PhGaNInv生成的波形。也许这只是一种坏传感电路?ina - 240当前传感运算放大器,明智的共模电压在5莫姆VSC输出电阻串联?
什么仍然让我问题是C阶段(黄色)似乎BOOSTXL-3PhGaNInv董事会来说都是最糟糕的一个,我自己的。