这些文件允许在考虑其完整的动力学模型的情况下,对差动操纵(类似独轮车)移动机器人进行仿真。这里采用的动态模型是基于速度(而不是扭矩),这使得它更容易与现有的移动机器人控制器集成,生成线速度和角速度的参考。
虽然不是必需的,该块被构建为与彼得·科克的机器人工具箱兼容,因此用户可以使用工具箱功能。
动态参数的设置可用于以下机器人:
- 先锋3-DX病态激光传感器;
- 先锋3-DX而不激光传感器;
-先锋2没有机载计算机(没有激光传感器);
-先锋2配备车载电脑(无激光传感器);
-载重55公斤的机器人轮椅;
-机器人轮椅运载125公斤重的人;
- Khepera III(劳特,2011);
- RobuLAB-10 (SHOJAEI et al., 2011)。
该文件包括两个库:
- “DiffSteer_model.slx”:包含差分驱动移动机器人的运动学和动态块。
——“控制器。Slx ":包含以下块:
A)轨迹跟踪运动学控制器;
B)动态补偿控制器1;
c)中动态补偿控制器2;
d)动态参数估计器(用于自适应控制器);
E)轨迹生成器;
f)性能计算器(IAE、ITAE、ISE、ITSE和能量指数)。
下面以四种金宝appSimulink系统为例:
1.“kinematic_controller_system。Slx”:利用机器人的运动学和动态块实现一个简单的轨迹跟踪控制器。
2.“dynamic_controller_system.slx”:实现了一个更复杂的系统,该系统包括自适应动态补偿控制器和有噪声的传感器测量值的轨迹跟踪控制器。
注:运行“kinematic_controller_system.slx”或“dynamic_controller_system.slx”模拟后,您可以查看运行包含脚本“plot_results.m”的结果。
3.“sl_lanechange_unicycle.slx”:实现相同的系统为机器人工具箱“sl_lanechange”,但使用差分的运动学模型转向移动机器人。
4.“sl_lanechange_unicycle_dynamics.slx”:实现相同的系统为机器人工具箱“sl_lanechange”,但是使用运动学和差速器的动态模型转向移动机器人。
此外,还提供了以下脚本:
1.“sim_kin_controller。M”:使用kinematic_controller_system。Slx”系统来模拟运动轨迹跟踪控制器作用于移动机器人(完整模型)。
2.“sim_dyn_controller。M ":使用dynamic_controller_system. M "。Slx”系统仿真自适应动态补偿控制器与作用于移动机器人的轨迹跟踪控制器(完整模型)。
3.“plot_results。m”和“plot_results_kin。给出模拟结果。
所有块在MATLAB R2012b,R2013a,R2014b,R2016a和2017A,所有在Windows下进行了测试。
享受吧!
如果你使用这个工具箱,请引用以下论文:
MARTINS,F. N.,Sarcinelli继续-Filho的,M。和CARELLI,R.
速度为基础的动态模型及其性质差分驱动移动机器人。
杂志智能与机器人系统2016。
http://rdcu.be/npvw
@article {martins2017velocity,
title={基于速度的移动机器人动态模型及其属性},
作者={Martins, Felipe N and Sarcinelli-Filho, M{\'a}里约热内卢and Carelli, Ricardo},
期刊={智能\&机器人系统期刊},
体积= {85},
数= {2},
页面= {277 - 292},
年= {2017},
出版商= {}斯普林格
}
作者:菲利普·多纳西门托·马丁斯
https://about.me/felipe.n.martins
基于Felipe Nascimento Martins和Wanderley Cardoso Celeste之前的作品
巴西圣埃斯皮里托联邦大学
2006 - 2008
有关更多信息,请参阅:
MARTINS,F. N.,天蓝色,W. C.,CARELLI,R.,Sarcinelli继续-Filho的,M。和
一种自主移动机器人的自适应动态控制器
轨迹跟踪。控制工程实践,第16节,第1354年至1363年,2008年。
http://www.sciencedirect.com/science/article/pii/S0967066108000373
马丁,F. N. Modelagem e Compensacao da Dinamica de Robos Moveis e sua
我是Formacao的控制台。这是Engenharia Eletrica - Automacao。
联邦大学圣埃斯皮里图州,2009年。
LAUT,杰弗里。对于迁移控制策略动态参数辨识方法
异构轮式移动机器人之间。moran的侮辱。伍斯特理工学院,2011年。
https://www.semanticscholar.org/paper/A-Dynamic-Parameter-Identification-Method-for-Migr-Laut/000b0647483dad86a7cb6c51c25cff0e3219b633
SHOJAEI, Khoshnam等。差动轮式移动机器人的自适应轨迹跟踪控制。《机器人》,第29页,第03号,第391- 402,2011年。
引用
费利佩•马丁斯(2021)。基于速度的动态模型和用于差分自适应控制器转向移动机器人(//www.tatmou.com/matlabcentral/fileexchange/44850-velocity-based-dynamic-model-and-adaptive-controller-for-differential-steered-mobile-robot), MATLAB中央文件交换。检索。
意见及评分(8.)
你也可以从以下列表中选择一个网站:
谢谢!
你好,K。
下面是一些机器人的识别参数集。
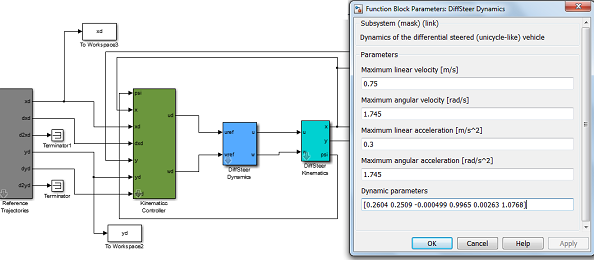
[0.2604 0.2509 -0.000499 0.9965 0.00263 1.0768];先锋3DX带有病态激光传感器
[0.5338 0.2168 -0.0134 0.9560 -0.0843 1.0590];先锋3DX无激光传感器
[0.2183 0.1918 -0.0050 0.9993 -0.0279 1.0142];先锋3DX %(由Jeffrey Laut鉴定)
[0.1992 0.13736 0.001954 0.9907 0.01554 0.9866];先锋2没有机载计算机(没有激光传感器)
[0.3037 0.2768 -0.0004018 0.9835 0.003818 1.0725];先锋2带机载计算机(无激光传感器)
[0.3759 0.0188 0.0128 1.0027 -0.0015 0.9808];%机器人轮椅carring一个55千克人
[0.4263 0.0289 0.0058 0.9883 0.0134 0.9931];%机器人轮椅carring一个125公斤人
[0.0228 0.0568 -0.0001 1.0030 0.0732 0.9981];% Khepera III(由Jeffrey Laut鉴定)
你也可以通过点击“DiffSteer Dynamics”区块的“help”选项来检查动态参数。
您可以通过双击“DiffSteer Dynamics”块并在适当的框中输入上述参数之一来更改一组动态参数。
确定给定机器人动态参数的过程,参考文献如下:
基于动态模型的多机器人群体控制与避障研究。《机器人》,n. 3, v. 26, p. 345—356,2008。
LAUT,杰弗里。异构轮式移动机器人间迁移控制策略的动态参数辨识方法。moran的侮辱。伍斯特理工学院,2011年。
你能解释一下我如何选择使用哪个动态吗?
我怎样才能改变先锋3DX和先锋2之间的动态?
非常感谢你分享这个模型,很棒的工作。
谢谢马丁斯教授的这份文件