控制与MATLAB和Simulink覆盆子π驱动机器人金宝app
版本1.1.0.0(3.42 MB)
MathWorks仿金宝app真软件团队
控制与MATLAB和Simulink覆盆子π驱动机器人金宝app
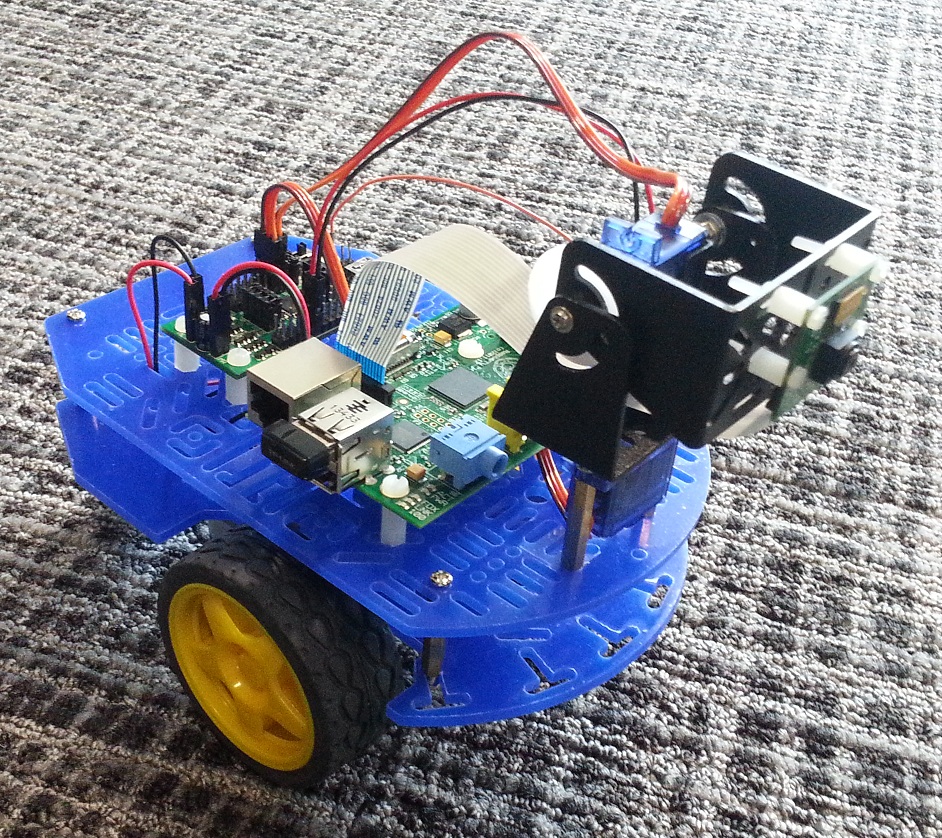
这个项目向你展示了如何控制一个覆盆子πMATLAB和Simulink驱动机器人。金宝app
从MATLAB和原型机器人的基本控制目标跟踪的图像处理技术。默认的目标是75 x75mm的绿色矩形。
一旦确定目标,使用仿真软件部署机器人的控制系统,这样它可以自动驱动到目金宝app标。
https://www.youtube.com/watch?v=kTXzaBOrEXY
与仿真软件®支持包金宝app树莓π™,金宝app你可以设计信号或图像处理算法和应用程序上运行独立的覆盆子π。您还可以使用Stateflow开发更复杂的算法,DSP系统工具箱,工具箱计算机视觉系统。
我们也可以认为这个条目的灵感来自于“覆盆子π硬件仿真软件支持计划”文件交换。金宝app金宝app
引用作为
MathWorks仿金宝app真软件团队(2023)。控制与MATLAB和Simulink覆盆子π驱动机器人金宝appGitHub (https://github.com/mathworks/RaspberryPiRobot)。检索。
MATLAB版本兼容性
创建R2014a
兼容任何释放
平台的兼容性
窗户 macOS Linux类别
标签
版本使用GitHub缺省分支不能下载
| 版本 | 发表 | 发布说明 | |
|---|---|---|---|
| 1.1.0.0 | 更新到Github的链接。 |
|
|
| 1.0.0.0 |
|
问题在这个视图或报告GitHub插件,参观GitHub库。
问题在这个视图或报告GitHub插件,参观GitHub库。