移动机器人培训库和模拟地图生成器应用程序的培训视频系列。

基于ARM cortex的VEX微控制器的生成代码。

使用Simulink自动编程VEX EDR V5机器人大脑金宝app
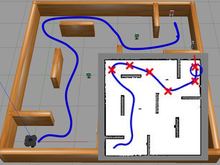
使用MATLAB和Simulink为移动机器人和UGV创建自主导航软件堆栈的示例金宝app

获取乐高MINDSTORMS EV3的传感器数据和控制输出
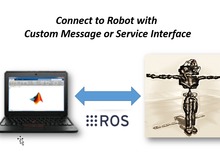
在MATLAB和Simulink中使用自定义ROS消息和服务类型。金宝app

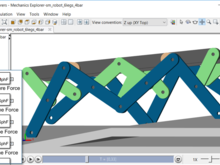
机器人手臂在两个传送带之间传送零件

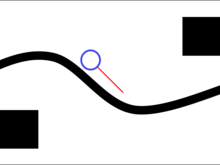
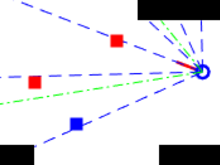
计算/应用任意3D线的旋转。
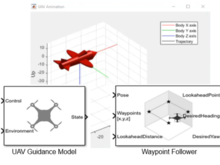
用于模拟无人机(uav)和连接硬件的算法

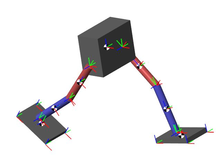
易于使用的逆向运动学GUI的完全配置模拟2关节机器人手臂。

开链机器人模拟工具箱

基于MATLAB和Simulink的机械金宝app臂支持金宝app

一些代码解决机器人方程

为BeagleBone生成和部署代码®蓝色的板

驾驶你的乌龟机器人获取传感器数据。

ScorBot工具箱

学习如何开发基于人工智能的自主移动机器人的实践工作坊
机器人逆运动学优化算法与MATLAB源代码
设计一个带有DJI的路径跟随器®N3自动驾驶仪和NVIDIA®Jetson Nano使用DJI车载ROS SDK

一个讲习班涵盖了用MATLAB和Simulink为移动机器人编程自主任务的要点。金宝app

“利用故障重构技术进行物理属性检测的物体识别”项目文件

这个工具箱提供了创建和操作对偶四元数的有用函数。

这个Rrepository包含一个matlab库来模拟TriPed机器人以及几个示例。
接触力的例子和库。
一个工具箱控制KUKA iiwa机器人从matlab。

绕任意给定的3D轴对单个2D或3D矢量或矢量数组进行3D旋转。
所有与学生竞赛-移动机器人训练系列视频相关的文件。

这个包中包含了制造能够在道路和走廊上行走的移动机器人所需的文件

这个包包含了构建基于树莓派的移动机器人远程控制所需的文件

工业4.0作为河内的塔,那里有三个地方控制的街区按顺序出现。

基于Matlab/金宝appSimulink的运动频率约束下时间最优轨迹发生器自动设计
从一组相应的图像投影计算基本矩阵

金宝appUSV的Simulink模型

这是一个基于Simulink的故障树分析(FTA)的简单原型金宝app。

从MATLAB控制Zaber运动装置。
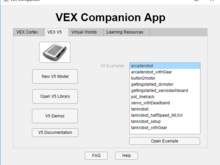
增强VEX EDR硬件支持包的用户体验的附加组件金宝app
示例文件为MATLAB和Simulink Robotics金宝app Arena行走机器人视频。
用于车辆运动学、可视化金宝app和传感器仿真的MATLAB和Simulink工具。
这个工具箱是一个Simulink虚拟环境的集合,旨在帮助教授移动金宝app机器人的基本概念

课程项目机器人(力学和控制)ABB IRB 4600机械手运动学和动力学Waleed Abdulrahman Saleh Al-akwa'a 14/201

RoboDK API允许您直接从Matlab代码模拟和编程工业机器人。

开始使用MATLAB和Simulink以及机器人操作系统(ROS)的资源。金宝app
用MATLAB和Sim金宝appulink文件对ROBOTIS OpenManipulator进行建模和仿真

结合Matlab和ROS的Pick & Place应用程序
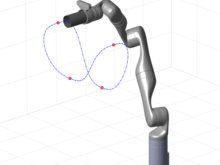
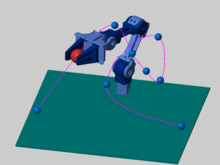
以MATLAB和Sim金宝appulink为例进行机器人轨迹生成和评估。

这个库是为了帮助学生开始使用MATLAB和Simulink感知算法的实际方法。金宝app

用于轨迹规划和执行器分析的机械手和移动机器人模型。

多智能体算法实验验证的分布式机器人试验台。
无人水面飞行器自适应滑模控制的实现

利用车辆前视摄像头计算的光流算法实现无人机/地面机器人避障。

非线性机器人系统的扩展卡尔曼滤波器。

一种二连杆机械臂机器人模型预测控制动力学方法。

针对复杂的两连杆平面机器人,提出了一种新的自适应摩擦补偿方法。

模拟器- Motoman机器人I20

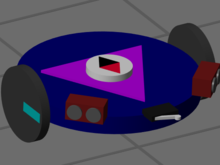
这个文件代表了一个球形机器人Norma的动力学。详情请参考https://arxiv.org/pdf/1908.02243
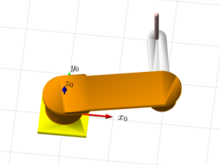
在这个程序中,ZYX欧拉角序列被用来模拟一个固定在一定高度的平台。旋转完成了

482 / 5000 Résultats基于M.E.F的双柔性臂机械手的拆卸P.D.控制
